Hierarchy structures in finite index CMC surfaces
-
William H. Meeks III



Abstract
Given
1 Introduction
Let X denote a complete Riemannian 3-manifold with positive
injectivity radius
where Δ is the Laplace–Beltrami operator on M,
where
The primary goal of this paper is to describe the structure of complete
immersed H-surfaces
In the sequel, we will denote by
Definition 1.1.
For every
the space of all H-immersions
X is a complete Riemannian 3-manifold with injectivity radius
M is a complete surface with smooth boundary (possibly empty), and when
If
be the open intrinsic
Suppose that
When
In the next result, we will make use of harmonic coordinates
Theorem 1.2 (Structure Theorem for finite index H-surfaces).
Suppose that
there exists a (possibly empty) finite collection
of points,
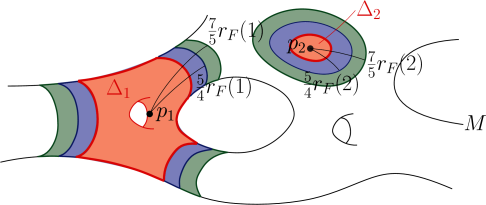
Portions with concentrated curvature: Given
For
In particular, the intrinsic distance between
It holds
see Figure 1.
The index
Transition annuli: For
where
consists of
(1.1)where we have taken coordinates x in each of the
Region with uniformly bounded curvature:
Moreover, the following additional properties hold:
Geometric and topological estimates: Given
If
If
If
where
and so
(1.2)- (1.3)
Genus estimate outside the concentration of curvature: If M is orientable,
Area estimate outside the concentration of curvature: If
There exists a
(1.4)where
In particular, if M has infinite radius or if M has empty boundary and it is non-compact, then its area is infinite.
The second fundamental form concentrates
inside the intrinsic compact regions
![Figure 2
The transition annuli: On the right, one has the extrinsic
representation in X of one of the annular multi-graphs G in
F
(
Δ
1
)
∩
[
B
¯
X
(
F
(
p
1
)
,
r
F
(
1
)
)
∖
B
X
(
F
(
p
1
)
,
r
F
(
1
)
/
2
)
]
{F(\Delta_{1})\cap[\overline{B}_{X}(F(p_{1}),r_{F}(1))\setminus B_{X}(F(p_{1})%
,r_{F}(1)/2)]}
;
in this case, the multiplicity of the multi-graph is 3.
On the left, one has the intrinsic representation of
the same annulus (shadowed); there is one such annular multi-graph for
each boundary component of
Δ
i
{\Delta_{i}}
.](/document/doi/10.1515/acv-2022-0113/asset/graphic/j_acv-2022-0113_fig_0002.png)
The transition annuli: On the right, one has the extrinsic
representation in X of one of the annular multi-graphs G in
The proof of the Structure Theorem 1.2 is carried out
in Section 5, and it will be done by induction on the index
bound I. In the case
A key step in the proof of Theorem 1.2 is to obtain
curvature estimates for a large portion of the H-surface
Observe that (1.4) is a lower bound for the area of an
H-surface in a Riemannian 3-manifold X, described
in terms of an upper bound for its absolute mean curvature function
An important theoretical consequence of the Structure Theorem 1.2
is the existence of compactness results for H-surfaces of
bounded index in X. More specifically, in Section 6
we state and prove some compactness
results for sequences of complete immersions with
constant mean curvature in
In regards to the just mentioned
compactness results in Section 6,
it is worth mentioning the related paper [3] by Bourni, Sharp and Tinaglia,
where they give weak compactness results for a
sequence of embedded CMC hypersurfaces
in a compact Riemannian manifold of dimension m with
In [18], we give applications of
Theorem 1.2 to understand global properties of
immersed H-surfaces
2 Index of one-sided H-immersions, harmonic coordinates and multi-valued graphs
In Theorem 1.2, we referred to the index of one-sided minimal immersions, harmonic coordinates and finitely valued multi-graphs. We will devote this section to give some details about these notions.
Definition 2.1.
Given a one-sided minimal codimension-one immersion
Definition 2.2.
Given a (smooth) Riemannian manifold X, a local chart
Given
It holds
The
If the absolute sectional curvature of X is bounded by some
constant
Definition 2.3.
Let
satisfies
Given
where the projection Π refers to the harmonic coordinates.
If
for any other choice of harmonic chart around
3 Finitely branched minimal surfaces in
ℝ
3
of finite index
In the process of finding local pictures of H-immersions as
in Theorem 1.2, we will find complete, non-flat,
finitely branched minimal surfaces in
Definition 3.1.
Let Σ be a smooth surface endowed with a conformal class of
metrics. We say that a harmonic map
for z near 0, where
The next result is a generalization of the well-known
Jorge–Meeks formula [12] to the case of a possibly branched
and non-orientable complete minimal surface
Proposition 3.2.
Let
where
In particular,
Proof.
To prove each of the statements in the above proposition, it suffices to consider the special case that Σ is connected, which we will assume holds for the remainder of the proof.
We first prove (3.2). Note that the total curvature
Using the Gauss–Bonnet formula in the compact portion
of Σ obtained by removing pairwise disjoint disks around
its ends (viewed as points in
We next recall a fundamental lower bound for the index
where
Inequality (3.4) has not been explicitly stated
in the literature, so an explanation is in order.
Ros [24] proved that
Remark 3.3.
Inequality (3.4) can be expressed in a unified way regardless of the orientability character of Σ, if we use the Euler characteristic. Recall that if Σ is orientable, then its Euler characteristic is
(3.5)where
Lemma 3.4.
Let
If f is stable, then Σ is non-orientable and
If Σ non-orientable with
Proof.
Assume that
Since Σ is non-orientable and f is stable, the main result
in [24] implies that
(3.6)
which contradicts that Σ is stable and proves (i) of the lemma.
To prove (ii), assume that Σ is non-orientable and
4 Almost flat annular H-multi-graphs of bounded multiplicity
For the next lemma, we will need the following notation. For
Observe that the statement of the next lemma is invariant under homotheties centered at the origin.
Lemma 4.1.
Given
Σ makes an angle greater than or equal to
Given
Then there exists
at every point x in its domain of definition.
Furthermore, for each
The intrinsic distance between the two boundary components of
Proof.
The first step in the proof consists of showing that,
for
Observe that if
in
Regarding the validity of (C2) in the range
Therefore, (C2) holds in
The second step in the proof consists of demonstrating that (C1) and (C2)
hold for every
Finally, (C3) holds for every
Remark 4.2.
Since the statement of Lemma 4.1 is invariant under
rescalings of the ambient metric, we conclude that the
last lemma holds if we replace the ambient space
We replace the notion of Gauss map in hypothesis (B2) of Lemma 4.1 by parallel translation of the unit normal vector to Σ at a point
We replace the upper bound in conclusion (C2) of Lemma 4.1 by
Definition 4.3.
Fix
of multi-graphical (immersed) H-annuli
G is an immersed H-annulus in X, whose boundary
Given y in P, denote by
Lemma 4.4.
In the situation of Definition 4.3, there exist
Furthermore, every such graph G is stable.
Proof.
Suppose that
From this point on, we will additionally assume that
Since
Definition 4.5.
Fix
Observe that both
5 The proof of Structure Theorem 1.2
Consider numbers
5.1 The case of uniformly bounded second fundamental form and the proof of Theorem 1.2 (V) in the general case
Suppose that the norms of the second fundamental forms of all
immersions
Assertions (i), (ii), (I), (II), and (IV) of Theorem 1.2 are vacuous.
Theorem 1.2 (iii) holds by assumption and (III) reduces to
We next prove that Theorem 1.2 (V) holds without the assumption that the norms of the second fundamental forms of all immersions
First, suppose that
(5.1)where the constants
are given by Proposition B.3. Given any
(5.2)Define
(5.3)which proves Theorem 1.2 V, in this case (F3.A): if
Next assume that
such that, for any point
where
Observe that
(5.4)which proves Theorem 1.2 V, in this case (F3.B).
To prove that (5.4) holds, first note that if
Assume now that
and so
(5.5)By our choice of
(5.6)Hence,
which proves that (5.4) holds.
From (F3.A) and (F3.B), we deduce that Theorem 1.2 (V) holds for the value
In the sequel, we will assume that there is no uniform bound for the norms of the second fundamental forms of surfaces in Λ.
5.2 Stable pieces of H-surfaces in Λ and their curvature estimate
By Theorem A.1 and with the notation there,
there exists a universal constant
Define
It follows that if
and the intrinsic ball centered at p of radius
Lemma 5.1.
Let
For each
Proof.
Since
such that
in particular
if
5.3 Strategy of the proof of Theorem 1.2
Given
Similar arguments to those in Section 5.1 show that
Theorem 1.2 holds for immersions in
Observe that if
The strategy to prove the theorem consists of proving the following two steps.
Step 1.
Assertions (i)–(iii) of the theorem hold.
This will be proven by induction on I, by analyzing local pictures of
a sequence of immersions
Step 2.
If (i)–(iii) of the theorem hold, then (I)–(IV) also hold for a possibly larger choice of
Our next goal is to complete step 1. Although not strictly needed in the induction process, we
first explain the arguments needed to prove the case
5.4 Proofs of Theorem 1.2 (i)–(iii) for
I
=
1
Assume
5.4.1 Local pictures around points where
|
A
M
|
>
t
,
for t sufficiently large
Next we will adapt some arguments in [20] to this immersed setting. Given
given by
is attained at
For
The intrinsic balls
For n large, the immersed surface
After extracting a subsequence, the
Defining
Since f is not flat at the origin, the index of f is 1. In this setting, López and Ros [14] proved that if Σ is orientable, then f is either a catenoid or an Enneper minimal surface. On the other hand, [6, Theorem 1.8] gives that Σ must be orientable.
We next show that Theorem 1.2 (i)–(iii) hold in this case
Let
We can also pick a smallest
The index of
The image through the Gauss map of f of each component
The length of each component of the intersection of
Applying the estimate (B.7) in Proposition B.4
with
By Proposition B.4 (ii), the intrinsic distance in the pullback metric by f from
Definition 5.2.
Given
that contains
Properties (H0)–(H5) and the convergence in (G5)–(G6)
imply that, for
The index of
The image of
The intrinsic distance in the pullback metric by
Back in the original scale, observe that
and the following properties hold for n sufficiently large:
The index of
The image of
It holds
The intrinsic distance in the pullback metric by
Therefore, given
then
satisfies hypotheses (B1)–(B3) of Lemma 4.1 with the choices
5.4.2 Local pictures have a uniform size
Proposition 5.3.
There exists
Proof.
Define
Rescale
Our goal is to understand the limit of (a subsequence of)
Notice that
As
For any
By curvature estimates for stable H-surfaces, we deduce
that the sequence
Applying Lemma 4.1 (see also Remark 4.2) to
and
After passing to a subsequence,
Repeating the same reasoning in
Definition 5.4.
Consider the
We will show that this is a valid choice for the
We finish this section by showing how to deduce Theorem 1.2 (i)–(iii)
in this case of
It holds
Recall that R was defined just before (H0)–(H5) only depending on τ, and
For every
such that
and if t is sufficiently large, then the description in (J0)–(J5) holds for F with
Define
By properties (J2)–(J4) and by Proposition 5.3, we can apply Lemma 4.1
to each of the annular portions of
Using Lemma 4.1 (C2) (see also Remark 4.2 (D2)) in the second term of the right-hand side, we get
Since
Assertion (i) (b) follows from the definition of
Next we show (iii). Given
for every arc
Hence, Theorem 1.2 (iii)
will be proved if we check that
we conclude that
and so Theorem 1.2 (iii) holds.
Thus, Theorem 1.2 (i)–(iii) hold in this case
5.5 Proofs of Theorem 1.2 (i)–(iii) for
I
=
I
0
+
1
Assume that Theorem 1.2 (i)–(iii) hold for
By the arguments in the first paragraph of Section 5.3, we can assume that for each
such that the following assertions hold:
at
For each
and so the pairwise disjoint intrinsic balls
5.5.1 Local pictures around points where
|
A
M
|
>
t
,
for t sufficiently large
Given
Unlike what we had in the case
Claim 5.5 (Lower bound for the total spinning plus the number of the ends of f).
It holds
Proof.
If all ends of f are embedded, then
If f has at least one non-embedded end,
then the monotonicity formula for minimal surfaces implies
that the area growth of f at infinity is at least that of
three planes (again because f is not flat). Therefore, in this case,
Claim 5.6 (Upper bound for the genus of Σ).
If Σ is orientable, then
Proof.
This follows directly from equations (3.4)
and (5.10),
after observing that the total branching order
Claim 5.7 (Upper bound for the total spinning of f).
Proof.
This follows directly from (3.4) since
Recall that we have fixed
We can also pick a smallest
The index of
The image through the Gauss map of f of each component
The total length of the intersection of
Applying the last sentence in Proposition B.4 (ii)
with
The intrinsic distance in the pullback metric by f from
(5.12)
Given
The index of
For
It holds
The intrinsic distance in the pullback metric by
Back in the original scale, we have that
and the following properties hold for n sufficiently large:
The index of
For
It holds
The intrinsic distance in the pullback metric by
Therefore, given
then
satisfies the hypotheses (B1)–(B3) of Lemma 4.1
with the choices
5.5.2 How to proceed if the (first) local pictures fail to have a uniform size
Definition 5.8.
Define

Schematic representation of the extrinsic geometry of the
immersion
Remark 5.9.
Unlike what happened in the case
If
There exists some sequence
Assume that we are in case (ii) (B) above.
Roughly speaking, we will show that the immersions
Analyze the global convergence of the
The proof of the next lemma follows easily from the behavior of the blow-down limit
of any of the e ends of the complete minimal immersion
Lemma 5.10.
Relabel as
considered to be a mapping on an open annulus,
converges as
where
The branching order of
Such multiplicity (which is independent of n large) coincides with the spinning of the associated j -th end of
Let
Observe that
be the related quotient map, that is,
Furthermore,
The next statement can be viewed as a direct consequence of Lemma 5.10.
Lemma 5.11.
In the above situation, the following properties hold:
The sequence of immersions
that contains
The convergence in (ii) is smooth away from
Lemma 5.11 describes the convergence of (a subsequence of) the
Step (M2) needs two ingredients, which are Lemma 5.12
and Proposition 5.13 below. The first one relies on the
validity of Theorem 1.2 for
We remark that the surfaces
Lemma 5.12.
Consider a sequence
such that the following properties hold:
where
In harmonic coordinates centered at
Let
Then, after replacing by a subsequence, the following assertions hold:
Let b be the number of boundary components of
described in Theorem 1.2 (ii) converge as
There exist
such that the following assertions hold:
Given
There exist (not necessarily distinct) points
For
such that the following hold. Let
The positive numbers
compare to Theorem 1.2 (i) (b).
The number
The
converge smoothly as
of a compact surface
consists of the intersection of the limiting multi-graphs appearing in (ii) with
The boundary
where
There exists an infinite strictly increasing sequence
such that for each
In particular, for each
For each
Then
such that
For
(5.14)is the total spinning of the boundary curves of
containing
(5.15)where
Proof.
Since
to minimal multi-graphs in
We next prove that (iii) holds. To find the finite set
In this case, the set
such that
for each
satisfying (iii) of the lemma with respect to
Here,
Regarding (iv), we make the following two observations:
For each
This follows from the already proven (iii) (c) of this lemma.
For each
We next apply Theorem 1.2 to
which is possible by the induction hypothesis,
from where one has a corresponding constant
with
We also have a Δ-type domain
containing
We next check that the domains and numbers
satisfy (iv) (a)–(e) stated in the lemma.
Assertion (iv) (a) follows directly from (5.16), and assertion (iv) (b) follows from (5.17).
Regarding (iv) (c), since
Now, the rest of properties stated in (iv) (c) of the lemma are direct consequences of
Theorem 1.2 applied to
The convergence statement in (iv) (d) follows from standard curvature
estimates for CMC immersions. The last sentence in (iv) (d) follows from the
uniqueness of the limit as
and from the already proven (ii) of this lemma. Assertion (iv) (e) holds by construction, which finishes the proof of (iv) of the lemma.
Regarding (v), choose
This inequality implies that
Since
Now label
By (iv) (d), for each
converge smoothly as
of a compact surface
By a standard diagonal argument in n and
given by
in such a way that the immersion
such that
This proves (vi) of the lemma.
Finally, we prove (vii). Observe that the branching order
where
and thus (5.14) is proved. Finally, estimate (5.15) for the total spinning of
We now come back to (M2) above. Using the notation in Lemma 5.11,
suppose, after choosing a subsequence, that the
of minimal disks branched at the origin as described in Lemmas 5.10 and 5.11.
Thus, the desired (global) limit
Proposition 5.13.
In the situation above, let
such that the following assertions hold:
For any
For each
and there exists
There exist (not necessarily distinct) points
For almost all
converge smoothly as
whenever
Define
Then
with finite total curvature, where the following properties hold:
that appears in Lemma 5.11 , together with the closely related finite sets
Furthermore, the set of branch points of
The set of ends of
The map
The total branching order
(5.21)The following properties hold for some
The index of
The image through the Gauss map of
The total length of the intersection of
For all
that contains
Proof.
Recall the notation and statement of Lemma 5.11.
By assumption, the
and thus the surfaces
have uniform curvature estimates in a fixed sized
is at most
The construction of the finite set
appearing in the statement of the proposition, follows exactly the same arguments used to prove the
existence of the related set
The existence of the number
around which the second fundamental form of
Assertions (v) and (vi) of the proposition also follow with small modifications from
the proof of (iv) (d) and (vi) of Lemma 5.12,
where one also uses the fact that a complete minimal surface in
The proofs of (viii) (a) and of the first statement of (viii) (b) are clear
after taking
To finish the proof of the proposition, we check that (viii) (f) holds.
First, suppose that
Regardless of the value of J, and by the already proven (viii) (a) of this proposition,
the index of
is also equal to
is equal to the index of the surface in (5.22).
Observe that for n sufficiently large and m large and fixed,
that index of
is unstable. Then, if we denote by
(5.23)
If
as desired. Finally, if
This completes the proof. ∎
Lemma 5.14.
With the notation of Proposition 5.13, consider the partition of
introduced in (vi) (a) of that proposition.
Define the quotient space
be the related quotient map, that is,
consists of J elements in
The restriction of
Let
In particular, as
(5.24)
Proof.
The path-connectedness of
The existence of the embedded minimizing geodesic
Since
5.5.3 Finding an
s
0
-th local picture with a uniform size
Recall that in Definition 5.8 we introduced
Definition 5.15.
Define
As we did in Remark 5.9, we next discuss whether or not
Proposition 5.16.
There exists
With Proposition 5.16 at hand, we define
where
Proposition 5.17.
Assertions (i)–(iii) of Theorem 1.2 hold in the case
Proof.
The idea is to adapt appropriately the arguments at the end of
Section 5.4.2 (after Definition 5.4).
Pick a smallest
Given
where
Define
that contains
The intrinsic distance in the pullback metric by
Take t large enough such that:
It holds
The description in (J1’)–(J5’) holds for
Define
Given

Schematic (non-proportional) representation of the extrinsic
geometry of an immersion
Next we prove Theorem 1.2 (i) (a) in the
case
This proves that Theorem 1.2 (i) (a) holds in the
case
specified as in Definition 1.1, for some choices of
First, observe that the restriction
of F to
that is, condition (A2) in Definition 1.1 for
Next we will
explain how to choose the remaining
parameters
By Proposition 5.16, the following property holds:
Let
In particular, the intrinsic distance between the two boundary curves of
each
Observe that, taking
Property (P1) implies that the following property holds:
The second fundamental form of F is uniformly bounded (independently of
by a constant
With the above choices, it follows that the restriction of F to
and related numbers
with
and satisfying Theorem 1.2 (i)–(iii).
Finally, define
where
Now, it is clear that Theorem 1.2 (i)–(iii) hold for
first note that
and hence it suffices to show that
Arguing by contradiction, suppose that there exists a point
Then
where in the fourth line we have used that
leads to a contradiction. Manipulating the last inequality, it is clearly equivalent to
Therefore,
for
Recall that the domains
Definition 5.18.
Suppose that the number of
ascending levels
The norms of the second fundamental forms of the immersions
The points in
For
The set
5.6 Counting index, genus and total spinning for local hierarchies
In Section 5.5, we have explained a process of going “up” in
finding scales and limits with center
In order to understand the structure of the piece
In the remainder of this section,
5.6.1 The hierarchy associated to a Δ-type piece
Let
Because of properties (S2) (a) and (b), we will refer to

Schematic representation of a hierarchy
Example 5.19.
We will illustrate the above description with an example based on
Figure 5. The blue circle around
We now come back to the general description with the notation in (S1)–(S2)
and in Definition 5.18.
The hierarchy
for each
The number of ends
(5.33)
Let
We next make a similar quotient space of the abstract surface
defined as in Lemma 5.14. Observe that
Thus, every point in
Example 5.20.
As announced in Example 5.19, we continue to explain some aspects
in Figure 5. The red component
We now return to the general situation. Given
The index of
For different points
Let
Given
For each component W of
The set
(5.34)is contained in the limit as
Let
Property (U4) implies that the index
Definition 5.21.
If
If
If
If
Remark 5.22.
Observe that the notion of level only makes sense provided that
This recursive process of assigning levels to Δ (not being a minimal element) is finite, since each
This recursive process of assigning levels to Δ (not being a minimal element) is finite. In fact, it follows from the arguments used to prove Proposition 5.13 (viii) (f) that the index increases each time we add a level, and so
Definition 5.23.
We define the singular set
Example 5.24.
and Δ is a minimal element.
The simplest case of a non-trivial hierarchy
See Figure 5 for an example of a hierarchy with four levels. In this example,
The minimal elements of this hierarchy are
We can equip
The set
where
Note that each non-minimal element
Also, observe that
Definition 5.25.
We define the excess index associated to the subset of minimal elements of Δ by
This abstract model of the hierarchy
The cardinality
Definition 5.26.
We define
We will also need the following decomposition of
where
In turn, the following decomposition of
where the super-index “or” (orientable), “no” (non-orientable) refers to the orientability character of each component.
In this paragraph, we indicate how the notion of hierarchy arises in the proof of the
Structure Theorem 1.2.
,we used the notion of “ascension with
there exists a (possibly empty) finite collection of points
numbers
where the norm of the second fundamental form of
The notion of the hierarchy
Theorem 5.27.
Let Δ be as described previously and let it be finitely connected.
Then the index
where
where
Remark 5.28.
If Δ is orientable, the relation
Proof of Theorem 5.27.
First, observe that the functions
Suppose first that Δ is connected and its hierarchy
Hence,
By the principle of mathematical induction, assume that
By (5.36), the set
where
In the first paragraph after Definition 5.25, we explained that,
for n large,
for some component
To estimate the first term in the right-hand side of (5.45), we will
apply (3.5) to each of the components
(5.46)
Since the number of levels of the hierarchy for each compact piece
where
To estimate the third term in the right-hand side of (5.45),
we will apply (3.5) to each of the components of
where
Thus,
Since
the right-hand side of the last expression can be written as
By using
and (5.33), we can rewrite the last displayed expression as
We next analyze the terms in (5.50).
First, note that
We will analyze the sum in the right-hand side of (5.52) attending to the
following partition of
For the case (Q1), we have the equation
(5.53)
Regarding the case (Q2), for elements
The cases (Q3) and (Q4) deal with the subset
Lemma 5.29.
In the situation above,
Let
If
Proof.
Observe that the left-hand side of (5.55) is the sum of a possibly empty set
of positive integers, where we declare this sum to be zero if this set of
positive integers is empty (equivalently, if

Schematic representation of the top level of a hierarchy
Let
Therefore,
Since
Although
For
Thus,
Notice that, for each
We will construct
Choose an arbitrary
(5.58)
If
then
Suppose
Since
Note that
(5.59)
If
then
If
then there exists a shortest embedded arc
with one of its end points being some
and its other end point in
Note that
(5.60)
If
then
If
then we repeat the above process finitely many times
(because
and
Then
(5.61)
As
If equality in (5.55) occurs, then equality in (5.56) implies
that
Since the right-hand side of (5.56) must be equal to the left-hand side of (5.61), we deduce that
and that equality holds in (5.57) for each
We continue proving Theorem 5.27. We can estimate (5.50) as follows:
(5.62)
In order to bound from below the last sum in (5.62), note that
if
we deduce that
Using that
By the additivity in components of the correction term
By (5.66), the sum of (5.50) and (5.51)
is at least
Definition 5.30.
Observe that, given
For instance, the hierarchy given in Example 5.24 (ii)
has
Corollary 5.31.
Let
where
Proof.
In passing from (5.63) to (5.64) in the derivation of
the correction term
Next we prove both inequalities in (5.67). Both inequalities are
additive in the levels of the hierarchy, so it suffices to prove that
each level
where
and
We will prove that (5.68) holds by considering two mutually exclusive cases.
Suppose that
Suppose now that
Hence, (5.68) holds and the corollary is proved. ∎
In order to state and prove the orientable version of Corollary 5.31, we will need the following lemma (compare to Lemma 5.29).
Lemma 5.32.
Let Δ and
Let
If
If
Proof.
If
with equality if and only if
Suppose that
Finally, a calculation similar to the one used to prove
Lemma 5.29 demonstrates that the minimum value of the right-hand side
of (5.72) occurs precisely when
with equality if and only if
Corollary 5.33.
Let Δ and
Furthermore, the new correction term satisfies
Proof.
The argument is very similar to the one for proving Corollary 5.31, so we will only focus on the differences and use the same notation. We first check that
where
This completes the proof that, for Δ orientable, (5.76) holds.
We next prove (5.75) holds. If
Consequently, equality holds in the first inequality
of (5.75), while the second inequality reduces to
where
First, suppose that
Suppose now that
Hence, (5.77) holds and the corollary is proved. ∎
Proposition 5.34.
Let Δ and
If
If
If
If
If
If
Proof.
Suppose
To prove (ii) and (iii), suppose that
After replacing
We next discuss on the orientability character of Δ.
If Δ is orientable, the estimates from above for each of
Next suppose that
of suitable rescalings
We finish by proving (v) and (vi), so continue
assuming that
where for the equality we have used that
In the case that Δ is non-orientable, we apply Corollary 5.31 with the
estimate for the correction term
where for the equality we have used that
With inequalities (5.78) and (5.79) at hand, each of the
estimates from above for
5.7 Proofs of Theorem 1.2 I–IV
Next we will focus on the second step in our strategy of proving Theorem 1.2, see Section 5.3.
Assertion I of Theorem 1.2 follows from the fact that
We next prove II. The inequality
Now assume that Δ is orientable and
where
The inequality
in Theorem 1.2 (II) (d) follows directly
from (5.41): observe that the multiplicity of the multi-graph
associated to each boundary component (resp. the number of boundary
components) of
The inequality
in Theorem 1.2 (II) (e) follows from the multi-graphical structure proven in Theorem 1.2 (ii) and from Lemma 4.4. As for the second inequality in Theorem 1.2 (II) (e),
Equation (1.2) follows directly from the last inequality, since
To finish the proof of Theorem 1.2 II,
it remains to demonstrate II (f), which we do next.
Choose a minimal element
for n large enough.
When we ascend one level in
and the first integral is either close to zero or larger than
for n sufficiently large. Iterating
this process finitely many times, we get that
We next prove Theorem 1.2 III.
Suppose that the genus
Elementary surface topology of orientable surfaces implies that if Σ
is a possibly disconnected orientable
surface (possibly with boundary) and Δ is a compact, possibly
disconnected, smooth subsurface in the interior of Σ,
then the genus
with equality if and only if each component of Δ does not disconnect the component of Σ that contains it.
Applying (5.80) to M with
Hence,
If a domain
where for the equality we have used that
If
Thus, in this case
Now (5.83) and (5.84) give the common upper bound estimate
The function
in all cases.
Therefore, since it also holds that
From (5.82) and (5.86), we deduce that
which gives the desired inequality in Theorem 1.2 III.
To finish the proof of Theorem 1.2, it remains to
demonstrate IV, which we do next. Suppose
We will assume
Recall from property (P1) above (and with the notation there)
that the intersection of
consists of
For
to be the portion of
Therefore,
Observe that for t sufficiently large (equivalently, for
where
which proves property (R1).
Using the notation of the already proven Theorem 1.2 (ii), it clearly suffices to prove that
provided that
is invariant under rescaling of the ambient metric centered at
Therefore,
where in the last equality we have used that
We continue using the notation of (R1). Recall that for t sufficiently large,
is contained in
is contained in
all pairwise disjoint. Therefore,
Given
where
Therefore,
From this and (5.90), we conclude directly inequality (R3), which completes the proof of Theorem 1.2 IV.
6 Sequential compactness results in Λ for X fixed
Fix
Theorem 6.1.
Given
Suppose that the points
where
For each
For each
converge, as
where
denote these explicit limit immersions, where
There exists a partition
For each
for some compact Riemannian surface
For each
where as in the previous case,
The set of branch points of
There exist a positive integer
with
For any
For n sufficiently large, the number of boundary curves of
The restriction of
(Quotient space after collapsing of some points in
with itself, we define a quotient space
There exists a Riemann surface Σ and a conformal branched
There is a conformal embedding
of the disjoint union
The set of branch points of
and so it is described in (v) above.
and
The norm of the second fundamental form of
Proof.
Assume that Theorem 1.2 holds for I with associated constants
Corollary 6.2.
Given
Remark 6.3.
Consider a sequence
If
The proof of the theorem gives that there are blow-up points
Assume that
Funding source: Conselho Nacional de Desenvolvimento Científico e Tecnológico
Award Identifier / Grant number: 400966/2014-0
Funding source: Agencia Estatal de Investigación
Award Identifier / Grant number: PID2020-117868GB-I00
Award Identifier / Grant number: CEX2020-001105-M
Award Identifier / Grant number: P18-FR-4049
Funding statement: William H. Meeks, III was partially supported by CNPq, Brazil, grant no. 400966/2014-0. Research of both authors was partially supported by MINECO/MICINN/FEDER grant nos. PID2020-117868GB-I00 and CEX2020-001105-M, both funded by MCINN/AEI, and by regional grant no. P18-FR-4049 funded by Junta de Andalucia.
A Curvature estimates for stable H-surfaces
Rosenberg, Toubiana and Souam [25, Main Theorem] proved that there exists a universal constant
Observe that the above curvature estimate fails to hold when the H-immersion is minimal and one-sided; a counterexample can be constructed whenever a complete flat 3-manifold Y admits a complete, non-totally geodesic, stable one-sided minimal surface without boundary; see Remark A.2 for examples. The next theorem is an adaptation of (A.1) that includes curvature estimates for the case of one-sided minimal surfaces in Y; see also [24, Corollaries 9 and 10].
Theorem A.1 (Curvature estimate for stable H-surfaces).
There exists
Let
Proof.
Clearly, the validity of (A.2) implies that
(A.3) holds. Also observe that by
Remark A.2, any
We next prove the existence of a universal constant
Consider the open geodesic disk
After passing to a subsequence, we can assume that one of
the following three cases occurs for all
Suppose that case (III) holds. Since
Applying [25, Theorem 2.1] to the choices
Let
Define
Consider the sequence of immersed, one-sided, stable minimal surfaces
Observe that the intrinsic distances in
or equivalently,
Observe that
Therefore, after passing to a subsequence, the
We claim that S is stable. If S is two-sided, this is standard; see, e.g., [25, p. 636]. We next give a different argument that is valid regardless of whether S is one- or two-sided. Stability of S in the one-sided case amounts to show that
for every compactly supported smooth function
where
The desired contradiction (which proves (A.2) in the case that (III) holds) comes from the fact that
there are no complete stable non-flat minimal surfaces in
Next we will explain how to reduce case (I) to case (III).
If case (I) holds, then we have
and so
If we check that
then we will find a contradiction as we did in case (III). To see this, observe that two times the left-hand side of (A.10) can be written as
which finishes the proof in case (I). Similar reasoning reduces case (II) to case (III), which completes the proof of Theorem A.1. ∎
Remark A.2 (Lower bound estimates for
C
s
′
and
C
s
′′
).
We claim that π and
Here, the oriented cover
Straightforward calculations show that, at
Hence the constant
The standard fundamental region Q for
so the constant
Next consider the translational quotient of H of a helicoid in
The slab-type region W of H bounded by
two straight lines inside H at distance π apart is
stable, and the function
The above curvature estimates for
Question A.3.
If M is a complete, one-sided, stable minimal surface in a complete flat 3-manifold Y, does the following inequality hold?
More generally, does setting
These questions are also motivated by the result by
Ros [24] that the only complete non-flat stable
minimal surface in a quotient of
B Some results from another paper by the authors
In this section, we state, for the readers convenience, some results from [17] that we frequently apply in the proofs of the present paper.
Proposition B.1 (Intrinsic monotonicity of area formula [17, Proposition 2.4]).
Let
and let
Suppose that M is a complete, immersed, connected n-dimensional submanifold of X
and
If M is compact without boundary, then there exists
The n -dimensional volume
For all
(B.2)
where
Corollary B.2 ([17, Corollary 2.6]).
Let
Proposition B.3 ([17, Proposition 2.7]).
Given
Furthermore, given
If
and
We finish this summary of auxiliary results taken
from [17] with the following scale-invariant weak chord-arc type
estimate for branched minimal surfaces of finite index in
Proposition B.4 ([17, Proposition 4.1]).
Given
For any
(B.6)where
If f is injective with image being a plane, then the distance between any two points of
(B.7)where
In particular,
Acknowledgements
We thank Otis Chodosh for explaining to us his work [6]
with Davi Maximo on lower bounds for the index of a complete branched
minimal surface in
References
[1] N. S. Aiex and H. Hong, Index estimates for surfaces with constant mean curvature in 3-dimensional manifolds, Calc. Var. Partial Differential Equations 60 (2021), no. 1, Paper No. 3. 10.1007/s00526-020-01855-wSuche in Google Scholar
[2] L. Ambrozio, R. Buzano, A. Carlotto and B. Sharp, Geometric convergence results for closed minimal surfaces via bubbling analysis, Calc. Var. Partial Differential Equations 61 (2022), no. 1, Paper No. 25. 10.1007/s00526-021-02135-xSuche in Google Scholar
[3] T. Bourni, B. Sharp and G. Tinaglia, CMC hypersurfaces with bounded Morse index, J. Reine Angew. Math. 786 (2022), 175–203. 10.1515/crelle-2022-0009Suche in Google Scholar
[4] R. Buzano and B. Sharp, Qualitative and quantitative estimates for minimal hypersurfaces with bounded index and area, Trans. Amer. Math. Soc. 370 (2018), no. 6, 4373–4399. 10.1090/tran/7168Suche in Google Scholar
[5] O. Chodosh, D. Ketover and D. Maximo, Minimal hypersurfaces with bounded index, Invent. Math. 209 (2017), no. 3, 617–664. 10.1007/s00222-017-0717-5Suche in Google Scholar
[6] O. Chodosh and D. Maximo, On the topology and index of minimal surfaces II, preprint (2018), https://arxiv.org/abs/1808.06572. Suche in Google Scholar
[7] T. H. Colding and W. P. Minicozzi, II, The space of embedded minimal surfaces of fixed genus in a 3-manifold IV; Locally simply-connected, Ann. of Math. (2) 160 (2004), 573–615. 10.4007/annals.2004.160.573Suche in Google Scholar
[8] T. H. Colding and W. P. Minicozzi, II, The space of embedded minimal surfaces of fixed genus in a 3-manifold V; Fixed genus, Ann. of Math. (2) 181 (2015), 1–153. 10.4007/annals.2015.181.1.1Suche in Google Scholar
[9] D. Fischer-Colbrie, On complete minimal surfaces with finite Morse index in three-manifolds, Invent. Math. 82 (1985), no. 1, 121–132. 10.1007/BF01394782Suche in Google Scholar
[10] M. Grüter, Regularity of weak H-surfaces, J. Reine Angew. Math. 329 (1981), 1–15. 10.1515/crll.1981.329.1Suche in Google Scholar
[11] E. Hebey and M. Herzlich, Harmonic coordinates, harmonic radius and convergence of Riemannian manifolds, Rend. Mat. Appl. (7) 17 (1997), no. 4, 569–605. Suche in Google Scholar
[12] L. P. Jorge and W. H. Meeks, III, The topology of complete minimal surfaces of finite total Gaussian curvature, Topology 22 (1983), no. 2, 203–221. 10.1016/0040-9383(83)90032-0Suche in Google Scholar
[13] M. Karpukhin, On the Yang–Yau inequality for the first Laplace eigenvalue, Geom. Funct. Anal. 29 (2019), no. 6, 1864–1885. 10.1007/s00039-019-00518-zSuche in Google Scholar
[14] F. J. López and A. Ros, Complete minimal surfaces with index one and stable constant mean curvature surfaces, Comment. Math. Helv. 64 (1989), no. 1, 34–43. 10.1007/BF02564662Suche in Google Scholar
[15] D. Maximo, A note on minimal surfaces with bounded index, preprint (2018), https://arxiv.org/abs/1812.10728; to appear in Comm. Anal. Geom. Suche in Google Scholar
[16]
W. H. Meeks, III,
The classification of complete minimal surfaces in
[17] W. H. Meeks, III and J. Pérez, Geometry of branched minimal surfaces of finite index, preprint (2022), https://arxiv.org/abs/2211.03529.pdf. Suche in Google Scholar
[18] W. H. Meeks, III and J. Pérez, Geometry of CMC surfaces of finite index, preprint (2022), https://arxiv.org/abs/2212.14428. Suche in Google Scholar
[19] W. H. Meeks, III, J. Pérez and A. Ros, Local removable singularity theorems for minimal laminations, J. Differential Geom. 103 (2016), no. 2, 319–362. 10.4310/jdg/1463404121Suche in Google Scholar
[20] W. H. Meeks, III, J. Pérez and A. Ros, The dynamics theorem for properly embedded minimal surfaces, Math. Ann. 365 (2016), no. 3–4, 1069–1089. 10.1007/s00208-015-1311-zSuche in Google Scholar
[21]
W. H. Meeks, III and G. Tinaglia,
The geometry of constant mean curvature surfaces in
[22] W. H. Meeks, III and G. Tinaglia, Triply periodic constant mean curvature surfaces, Adv. Math. 335 (2018), 809–837. 10.1016/j.aim.2018.07.018Suche in Google Scholar
[23] M. J. Micallef and B. White, The structure of branch points in minimal surfaces and in pseudoholomorphic curves, Ann. of Math. (2) 141 (1995), no. 1, 35–85. 10.2307/2118627Suche in Google Scholar
[24] A. Ros, One-sided complete stable minimal surfaces, J. Differential Geom. 74 (2006), no. 1, 69–92. 10.4310/jdg/1175266182Suche in Google Scholar
[25] H. Rosenberg, R. Souam and E. Toubiana, General curvature estimates for stable H-surfaces in 3-manifolds and applications, J. Differential Geom. 84 (2010), no. 3, 623–648. 10.4310/jdg/1279114303Suche in Google Scholar
[26] A. B. Saturnino, On the genus and area of constant mean curvature surfaces with bounded index, J. Geom. Anal. 31 (2021), no. 12, 11971–11987. 10.1007/s12220-021-00708-ySuche in Google Scholar
© 2023 Walter de Gruyter GmbH, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Frontmatter
- Another proof of the existence of homothetic solitons of the inverse mean curvature flow
- A Weierstrass extremal field theory for the fractional Laplacian
- Minimizing movements for anisotropic and inhomogeneous mean curvature flows
- A singular Yamabe problem on manifolds with solid cones
- Uniqueness for volume-constraint local energy-minimizing sets in a half-space or a ball
- Limit of solutions for semilinear Hamilton–Jacobi equations with degenerate viscosity
- Monotonicity of entire solutions to reaction-diffusion equations involving fractional p-Laplacian
- Hierarchy structures in finite index CMC surfaces
- No breathers theorem for noncompact harmonic Ricci flows with asymptotically nonnegative Ricci curvature
- Wolff potentials and local behavior of solutions to elliptic problems with Orlicz growth and measure data
- Asymptotic analysis of single-slip crystal plasticity in the limit of vanishing thickness and rigid elasticity
- On the regularity of optimal potentials in control problems governed by elliptic equations
- Sobolev embeddings and distance functions
- Effective quasistatic evolution models for perfectly plastic plates with periodic microstructure: The limiting regimes
- On the area-preserving Willmore flow of small bubbles sliding on a domain’s boundary
- Sobolev contractivity of gradient flow maximal functions
- Discrete approximation of nonlocal-gradient energies
- Symmetry and monotonicity of singular solutions to p-Laplacian systems involving a first order term
- Flat flow solution to the mean curvature flow with volume constraint
Artikel in diesem Heft
- Frontmatter
- Another proof of the existence of homothetic solitons of the inverse mean curvature flow
- A Weierstrass extremal field theory for the fractional Laplacian
- Minimizing movements for anisotropic and inhomogeneous mean curvature flows
- A singular Yamabe problem on manifolds with solid cones
- Uniqueness for volume-constraint local energy-minimizing sets in a half-space or a ball
- Limit of solutions for semilinear Hamilton–Jacobi equations with degenerate viscosity
- Monotonicity of entire solutions to reaction-diffusion equations involving fractional p-Laplacian
- Hierarchy structures in finite index CMC surfaces
- No breathers theorem for noncompact harmonic Ricci flows with asymptotically nonnegative Ricci curvature
- Wolff potentials and local behavior of solutions to elliptic problems with Orlicz growth and measure data
- Asymptotic analysis of single-slip crystal plasticity in the limit of vanishing thickness and rigid elasticity
- On the regularity of optimal potentials in control problems governed by elliptic equations
- Sobolev embeddings and distance functions
- Effective quasistatic evolution models for perfectly plastic plates with periodic microstructure: The limiting regimes
- On the area-preserving Willmore flow of small bubbles sliding on a domain’s boundary
- Sobolev contractivity of gradient flow maximal functions
- Discrete approximation of nonlocal-gradient energies
- Symmetry and monotonicity of singular solutions to p-Laplacian systems involving a first order term
- Flat flow solution to the mean curvature flow with volume constraint