Exoskelette in der Intralogistik
-
Birte Pupkes
Birte Pupkes, M. Sc., arbeitet als Wissenschaftliche Mitarbeiterin am BIBA und beschäftigt sich mit Exoskeletten für Mitarbeiter in der Logistik.
Nils Hoppe, M. Sc., arbeitet als Wissenschaftlicher Mitarbeiter am BIBA und beschäftigt sich mit technischen Logistiksystemen und Methoden zur anforderungsgerechten Lösungsauswahl.
Christoph Petzoldt, M. Sc., leitet die Abteilung Robotik und Automatisierung am BIBA – Bremer Institut für Produktion und Logistik und beschäftigt sich mit Assistenzsystemen und Mensch-Technik-Interaktion.
Prof. Dr.-Ing. Michael Freitag ist Direktor des BIBA und leitet das Fachgebiet Planung und Steuerung produktionstechnischer und logistischer Systeme (PSPS) im Fachbereich Produktionstechnik der Universität Bremen.

Abstract
Due to the high physical demands of many manual work activities in intralogistics and the economic consequences of the resulting sickness-related absences, exoskeletons are becoming increasingly important. By physically relieving and actively supporting employees, work tasks can be made more ergonomic and the challenges mentioned can be counteracted. However, the variety of exoskeletons available on the market presents companies with major challenges when it comes to planning and selecting suitable systems. This article therefore presents an exoskeleton morphology that illustrates the different types of exoskeletons and enables the classification of suitable systems. Based on this, the results of a market analysis are visualized. Secondly, a method for the systematic and application-oriented selection of exoskeletons in intralogistics is presented. This method maps the application-specific requirements and ergonomic needs to the morphological characteristics in order to recommend suitable exoskeletons. The method is applied and validated using two intralogistics application examples, container unloading and palletizing.
Abstract
Zur Reduktion körperlicher Belastungen und krankheitsbedingter Fehlzeiten gewinnen Exoskelette in manuellen Arbeitsprozessen der Intralogistik zunehmend an Bedeutung. Die Einführung stellt Unternehmen jedoch vor die Herausforderung einer den Anforderungen entsprechenden Auswahl. Um diesem entgegenzuwirken, wird in diesem Beitrag eine Exoskelett-Morphologie vorgestellt, anhand derer 68 Exoskelette klassifiziert wurden. Integriert in eine Methode, in der anwendungsspezifische Anforderungen und ergonomische Bedarfe auf die morphologischen Merkmale abgebildet werden, erfolgt damit eine Empfehlung passender Exoskelette. Die Methode wird anhand von zwei intralogistischen Anwendungsbeispielen, der Containerentladung und der Palettierung, angewendet und validiert.
Einführung
Viele Prozesse in der Intralogistik werden trotz zunehmender Automatisierung in der Industrie manuell durch den Menschen durchgeführt [1], insbesondere Tätigkeiten mit hoher Komplexität, aufwendigen Produkten oder einer erforderlichen Flexibilität. Häufig sind diese Tätigkeiten körperlich besonders belastend, wodurch beim Arbeitnehmer Beschwerden am Stütz- und Hebeapparat entstehen können [2]. Die Fehlzeiten auf Grund von Muskel-Skelett-Erkrankungen (MSE) ergaben im Jahr 2020 in Deutschland einen Anteil von ca. 22 Prozent der Gesamtfehlzeiten [3] mit Produktionsausfallkosten in Höhe von 21,5 Mrd. Euro [4]. Die Fehlzeiten sind bei älteren Beschäftigten besonders hoch [3], deren Anteil durch den demographischen Wandel steigt [5, 6]. Eine ergonomische Arbeitsplatzgestaltung zur Vorbeugung von Beschwerden gewinnt daher bei vielen Unternehmen zunehmend an Bedeutung. Diesen Herausforderungen kann unter anderem mit Exoskeletten entgegengewirkt werden.
Exoskelette sind technische, am Körper getragene Unterstützungssysteme, die Arbeitnehmer bei ihren täglichen Aufgaben entlasten und eine ergonomische Körperhaltung fördern. Je nach Anwendungs- und Unterstützungsfall (z.B. Kraftunterstützung beim Heben, Entlastung bei Überkopfarbeiten, Haltungskorrektur) existiert eine Vielzahl unterschiedlicher Systeme. Durch deren Einsatz kann der Arbeitgeber seine Beschäftigten darin unterstützen, die beruflichen Herausforderungen länger ohne körperliche Beschwerden zu bewältigen [7] und darüber hinaus das Arbeitsvolumen, die Produktivität und die Effizienz erhöhen [7, 8]. All diese Faktoren sind für die aktuelle und zukünftige Wettbewerbsfähigkeit der Unternehmen wichtig [8]. Die Auswahl eines geeigneten Exoskeletts für die jeweilige Arbeitstätigkeit stellt dabei jedoch eine Herausforderung dar und beruht häufig auf dem subjektiven Empfinden von entscheidungsbefugten Personen [8]. Aus diesem Grund beschäftigt sich dieser Beitrag mit der Frage, wie Exoskelette systematisch und ganzheitlich für verschiedene Prozesse auf Grundlage von Systemkriterien empfohlen werden können.
Zur Klärung der Frage wird zunächst auf den aktuellen Stand der Technik bezogen auf Ergonomie-Bewertungsmethoden und Bedarfserfassung eingegangen. Anschließend wird eine Klassifizierung für Exoskelette vorgestellt, die eine Auswahl auf Grundlage der ergonomischen Bewertung und Prozesseigenschaften erlaubt. Auf dieser Basis wird für die Auswahl und Implementierung ein mehrstufiges Vorgehensmodell vorgestellt. Der Fokus dieses Beitrags liegt auf Phase 1 des Modells, welche im Anschluss an-hand von zwei Anwendungsbeispiele, der Containerentladung und der Palettierung dargestellt wird.
Ergonomie-Bewertungsmethoden und Bedarfserfassung
Zur Bewertung von Arbeitsbelastungen können unterschiedliche Ergonomie-Analyse-Methoden angewendet werden, die sich hauptsächlich im Umfang der betrachteten Körperbereiche unterscheiden. Bewertet werden dabei vor allem die Haltung der Arme, Handgelenke, Nacken, Oberkörper und Beine, aufgrund ihrer Position und Winkel. Einbezogen werden auch die Dauer und Häufigkeit der ausgeführten Bewegungen während einer Tätigkeit sowie die zu bewegenden Lasten. Zum Teil wird auch die Greifbarkeit der Objekte sowie die Arbeitsumgebung berücksichtigt. Die Methoden werden meistens von geschulten Mitarbeitern angewendet, die dabei u.a. auf Checklisten zurückgreifen können. Bei der Leitmerkmahlmethode (LMM) werden Fragebögen genutzt, um unter anderem die Dauer der Tätigkeit, Wiederholungen und Körperhaltung zu erfassen. Die Bewertung ist häufig subjektiv und kann zwischen den Anwendern leicht abweichen. Am Ende wird durch eine Gesamtpunktzahl und ein Ampelsystem angegeben, ob für die Tätigkeiten Schutzmaßnahmen eingeführt werden sollten [7]. Mögliche Maßnahmen sollten dabei nach dem STOP-Prinzip festgestellt werden [8]. Das STOP-Prinzip beschreibt die Rangfolge von Schutzmaßnahmen: Substitution (S), technische Schutzmaßnahmen (T), organisatorische Schutzmaßnahmen (O) und persönliche Schutzmaßnahmen (P). Häufig ist eine Substitution sowie technische und organisatorische Schutzmaßnahmen bei manuellen Prozessen in der Intralogistik nicht möglich, woraufhin persönliche Schutzmaßnahmen eingeführt werden [9].
Solche persönlichen Schutzmaßnahmen können dann zum Beispiel Exoskelette darstellen. Für deren konkrete Auswahl finden sich in der Wissenschaft und Praxis bisher nur eine geringe Anzahl an Methoden. Diese betrachten dabei Aspekte wie die Arbeitsschutzorganisation, Mitarbeiter- und Arbeitsplatzkontext, Exoskelett-Anforderungen, Gefährdungsbeurteilung, wirtschaftliche Aspekte sowie die Implementierung, Inbetriebnahme und Support [9, 10, 11]. Bei den Vorgehensmodellen fehlt allerdings entweder ein genaues Vorgehen zur Auswahl eines Exoskeletts oder aber die Verknüpfung mit einem Exoskelett-Katalog, um die Bestimmung eines konkreten Modells für spezifische Anwendungen zu ermöglichen.
Klassifizierung von Exoskeletten
Für die Auswahl passender Exoskelette, die die anwendungs- und personenbezogenen Anforderungen möglichst umfassend erfüllt, wird eine ausreichend große Datenbasis am Markt verfügbarer Lösungen benötigt. Hierzu existieren Webseiten, die eine Übersicht über verschiedene Systeme geben, wie z.B. Orthexo, Exoskeleton Report, Motion Miners Solutions, oder Direct Industries. Bei diesen ist festzustellen, dass deren Lösungsumfang stark variiert und nicht immer der aktuelle Zustand des Marktes abbilden. In den Katalogen werden die einzelnen Exoskelette in mehreren Kategorien zusammengefasst, allerdings folgen diese zwischen den Plattformen mit ihren unterschiedlichen Angeboten keinem einheitlichen Schema. Zusatzinformationen, die über die Grundkategorien, wie den unterstützen Körperbereich hinausgehen und für einen detaillierten Vergleich benötigt werden, sind dabei selbst innerhalb der Plattformen der einzelnen Betreiber für eine Auswahl nicht ausreichend und teils inkonsistent. Die Beschreibung der Lösungen anhand einheitlicher Merkmale und einer konsistenten Bezeichnungen der individuellen Ausprägungen würde einen effizienten Vergleich der Systeme sowie die computergestützte Entscheidungsfindung ermöglichen [10], wodurch Auswahlprozesse innerhalb variantenreicher Lösungsräume auch ohne explizites Fachwissen durchgeführt werden können [11, 12].
Neben den Umsetzungen der Internetkataloge existieren in der wissenschaftlichen Literatur verschiedene Ansätze zur Klassifizierung von Exoskeletten auf Basis von Literatur- und Marktrecherchen. Die Einsatzebereiche unterscheiden sich dabei deutlich und umfassen neben kommerziellen Lösungen für den industriellen Einsatz häufig auch solche aus dem medizinischen Bereich sowie Prototypen. Vorobiev et al. [13] beschreiben sieben Merkmale, die sie auf 13 Exoskelette anwenden. Goehlich et al. [14] klassifizieren insgesamt elf Systeme anhand ihrer unterstützten Körperregionen. Weidner & Karafillidis [15] stellen eine Klassifizierung anhand von Körperregionen sowie der Art der Bewegungsunterstützung vor und ordnen diesen verschiedene Typen von Exoskeletten zu. Diese wird von den Autoren in [16] auf 32 Exoskelette für den industriellen Einsatz angewendet, wobei zusätzlich technische Eigenschaften berücksichtigt werden. Voilque et al. [17] berücksichtigen in ihrem Beitrag 30 kommerziell verfügbare Systeme, die anhand der Kriterien Gewicht, Körperregion, aktiver oder passiver Unterstützung, Energiequelle sowie Einsatzsituationen kategorisiert werden. In der Arbeit von Matokhina et al. [18] wird eine Ontologie für Exoskelette mit acht Merkmalen vorgestellt, die auf einer Marktrecherche von 95 nicht näher benannten Systemen basiert. La Tejera et al. [19] präsentieren ein Modell mit sechs Merkmalen, dass sie auf 75 Exoskelette anwenden, von denen allerdings nur zehn tatsächlich kommerziell verfügbar sind. Tiboni et al. [20] untersuchen wissenschaftliche Beiträge über Exoskelette und leiten daraus sieben Merkmale ab, anhand derer sie die Systeme kategorisieren. Insgesamt wurden acht kommerzielle Systeme berücksichtigt, wobei der Fokus vorranging auf dem medizinischen Bereich liegt. Ein Großteil der beschriebenen Ansätze berücksichtigt nur eine geringe Anzahl kommerziell erhältlicher Systeme für den industriellen Einsatz und ist älteren Datums, womit die aktuellen technischen Entwicklungen und das Marktgeschehen nicht abgebildet werden. Außerdem ist festzuhalten, dass die bisherigen Ansätze wenige Eigenschaften berücksichtigen, die für eine direkte, anwendungsbezogene Systemauswahl verwendet werden können.
Aus diesem Grund wurden die Merkmale konsolidiert und erweitert, sodass sich ein direkter Bezug zwischen einzelnen Exoskeletten und den Aufgaben herstellen lässt, wie sie in der Leitmerkmalmethode erfasst werden. Die Merkmale wurden in einem morphologischen Kasten in Bild 1 gruppiert und Bereichen zugeordnet, die sich neben der Aufgabenbeschreibung auf die Unterstützung durch das Exoskelett, dessen Anwendung durch den Nutzer und weitere technische Eigenschaften beziehen. Eine Erklärung erfolgt im Kontext der Anwendungsbeispiele in Abschnitt „Anwendungsbeispiele“. Zusätzlich ist den einzelnen Ausprägungen eine Anzahl an Systemen zugeordnet, die diese aufweisen. Diese wurden in einer aktuellen Marktrecherche ermittelt, wobei insgesamt 68 Lösungen von 34 Herstellern berücksichtigt wurden. Auf Grundlage dieser recherchierten und klassifizieren Systeme kann eine systematische und anwendungsspezifische Lösungsauswahl erfolgen.
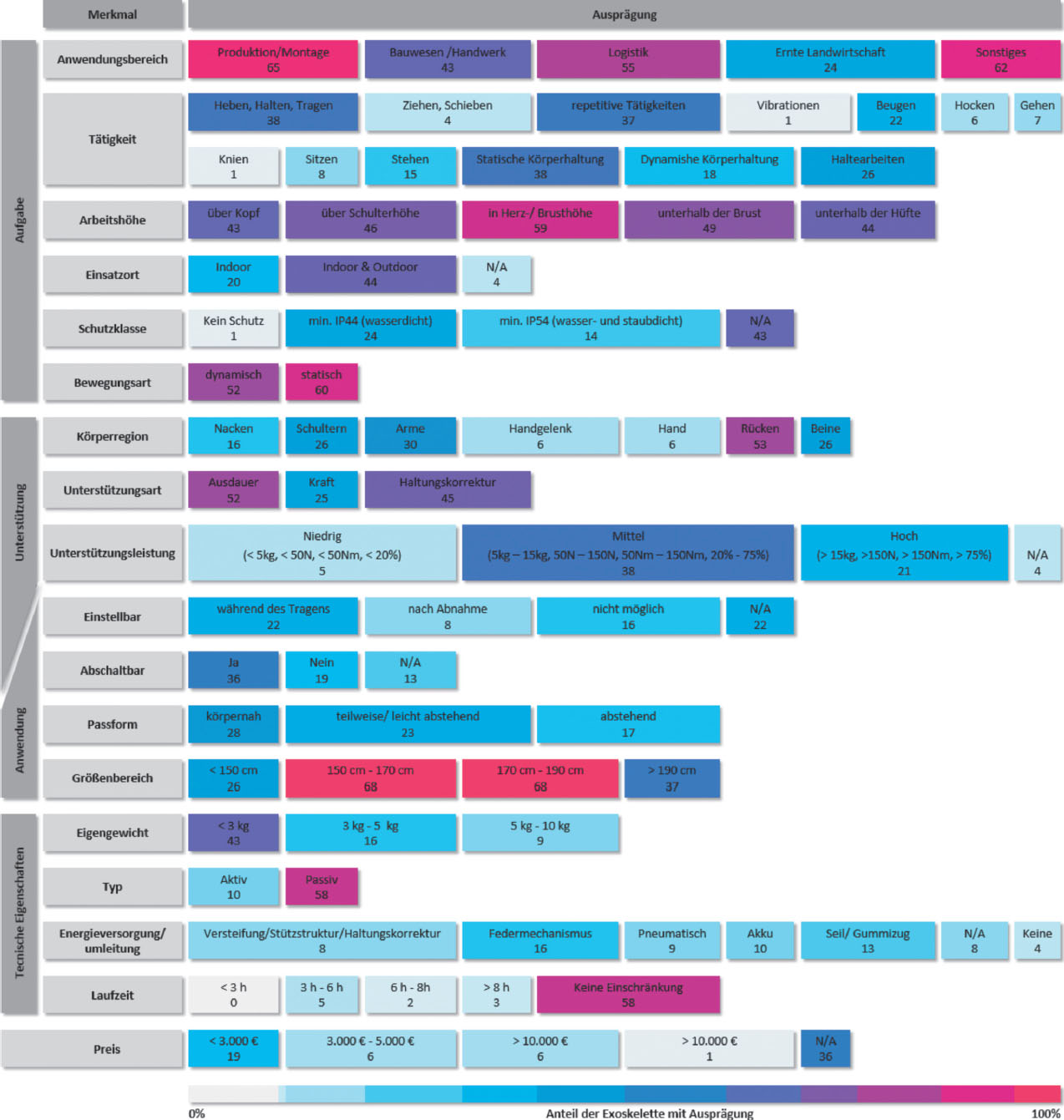
Exoskelett-Morphologie für eine anwendungsspezifischeLösungsauswahl
Vorgehensmodell zur anwendungsspezifischen Auswahl von Exoskeletten
Ausgehend von der initial eingeführten Forschungsfrage und dem Bedarf nach einer ganzheitlichen Methodik zur systematischen Auswahl von Exoskeletten wurde das in Bild 2 dargestellte und nachfolgend erläuterte Vorgehensmodell entwickelt, welches sich in drei Phasen gliedert:
Phase 1: Ist-Analyse des Arbeitsplatzes und Vorauswahl mehrerer Maßnahmen,
Phase 2: Erprobung verschiedener Maßnahmen (Pilotphase),
Phase 3: Implementierung einer ausgewählten Maßnahme (betriebliche Umsetzung).
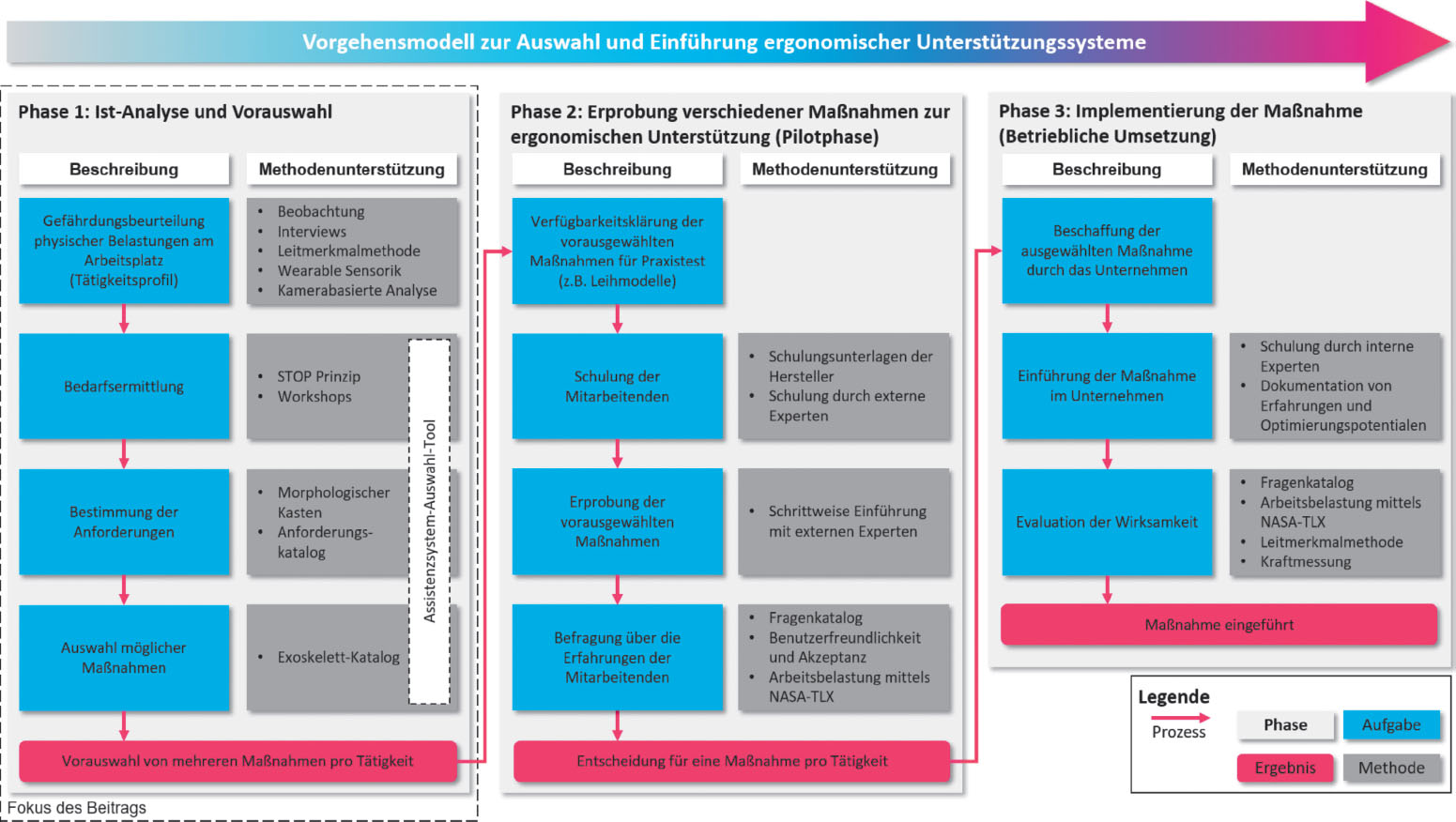
Methodisches Vorgehensmodell zur Auswahl und Einführung ergonomischer Unterstützungssysteme
Die einzelnen Aufgaben innerhalb dieser Phasen sowie Methoden, die bei der Durchführung der Aufgaben unterstützen können, werden nachfolgend erläutert.
Phase 1: Ist-Analyse des Arbeitsplatzes und Vorauswahl von mehreren Maßnahmen
Ziel der ersten Phase ist die Vorauswahl von verschiedenen, prinzipiell geeigneten Maßnahmen (Exoskelette) für die betrachteten Arbeitsplätze. Hierfür wird im ersten Schritt eine Gefährdungsbeurteilung hinsichtlich der physischen Belastungen durchgeführt. Dies erfolgt zum einen durch Beobachtung der Arbeitsabläufe und Anwendung einer Ergonomie-Bewertungsmethode (z.B. der Leitmerkmalmethode). Für eine tiefergehende Analyse kann zudem eine detaillierte Erfassung der Bewegungsabläufe unter Verwendung kamerabasierter oder sensorgestützter (IMUs) Verfahren erfolgen. Zum anderen sind die subjektiven Erfahrungen und Belastungsempfindungen der operativen Mitarbeitenden in semistrukturierten Interviews zu erfassen. Aus den Erkenntnissen für jeden zu bewertenden Arbeitsplatz wird ein Tätigkeitsprofil erstellt, welches im nachfolgenden Schritt für die Ermittlung von Unterstützungsbedarfen dient. Methodisch kann hier eine Orientierung am STOP-Prinzip (siehe oben) erfolgen. Im Sinne der Akzeptanzsteigerung ist eine frühzeitige Einbeziehung der operativen Mitarbeitenden zu empfehlen, sodass im Rahmen von Workshops die identifizierten Bedarfe mit der Shopfloor-Ebene abzustimmen und ggf. zu erweitern sind. Darauffolgend sind die Anforderungen an mögliche Maßnahmen zu bestimmen, wofür auf Basis der Merkmale aus dem oben entwickelten morphologischen Kasten ein Anforderungskatalog abgeleitet und dokumentiert werden kann. Ausgehend von den definierten Anforderungen erfolgt die Auswahl mehrerer möglicher Maßnahmen indem aus dem Lösungskatalog zur Exoskelett-Morphologie entsprechend der über die Anforderungen spezifizierten, morphologischen Ausprägungen mögliche geeignete Exoskelette entnommen werden.
Im Rahmen der laufenden Forschungsaktivitäten wird ein Assistenz-system-Auswahl-Tool entwickelt, welches einen geführten Prozess und eine teilautomatisierte Bearbeitung der einzelnen Aufgaben dieser ersten Phase ermöglicht. Im Ergebnis von Phase 1 liegt eine Vorauswahl von mehreren (zwei bis fünf) Exoskeletten pro Tätigkeit vor, die in der nächsten Phase erprobt werden können.
Phase 2: Erprobung der verschiedenen Maßnahmen (Pilotphase)
Ziel der Pilotphase ist die Entscheidung für eins der vorausgewählten Exoskelette durch praktische Erprobungen. Im ersten Schritt ist dabei die Verfügbarkeit der vorausgewählten Exoskelette für die Praxis-tests zu klären, wobei die jeweiligen Anbieter der Systeme zu kontaktieren und geeignete Modalitäten (z.B. Leihmodelle) zu vereinbaren sind. Anschließend sind die operativen Mitarbeitenden im Hinblick auf die Nutzung und das korrekte Anlegen der Exoskelette zu schulen. Sowohl für die Schulung als auch die Begleitung der Pilotphase ist die Einbeziehung externer Experten zu empfehlen, um eine möglichst offene Kommunikation der Erfahrungen, Probleme und Vorbehalte unabhängig von internen Organisationsstrukturen sicherzustellen. Die Erprobung der Exoskelette erfolgt über eine schrittweise Einführung, bei der die Nutzungszeit pro Woche langsam gesteigert wird, damit eine Gewöhnung an die Arbeit mit Exoskeletten als Arbeitsmittel erfolgt. Für die Erprobung der verschiedenen Systeme ist ein Wechsel entweder auf Tagesbasis oder auf Wochenbasis geeignet. Erfordert die betrachtete Tätigkeit die Zusammenarbeit von mehreren Personen, sollten die jeweiligen Personen mit demselben Exoskelett ausgestattet sein. Als Dauer für die Erprobungsphase sollten vier bis sechs Wochen vorgesehen werden, wobei in regelmäßigen Abständen (z.B. wöchentlich) eine Befragung der Mitarbeitenden zu den Erfahrungen hinsichtlich Benutzerfreundlichkeit, Akzeptanz und Arbeitsbelastung/-entlastung für die verschiedenen Systeme erfolgt. Nach Ablauf des Erprobungszeitraums sind die Erfahrungen auszuwerten und hinsichtlich der genannten Kriterien unter Berücksichtigung der Beschaffungskosten zu bewerten. Darauf basierend erfolgt die Entscheidung für ein Exoskelett je Tätigkeit.
Phase 3: Implementierung der ausgewählten Maßnahme (betriebliche Umsetzung)
Nach Auswahl eines Exoskelett-Modells pro Tätigkeit erfolgt dessen betriebliche Implementierung, beginnend mit der Beschaffung. Anschließend wird ein On-Site Exoskelett-Manager als unternehmensinterner Experte ausgebildet, welcher für den weiteren Einführungsprozess im Sinne kurzer Kommunikationswege als operativer Hauptansprechpartner dient, die Schulung der auszustattenden operativen Mitarbeitenden übernimmt sowie Erfahrungen und Probleme dokumentiert. Im Rahmen der laufenden Forschungstätigkeit erfolgt zudem eine Evaluation der Wirksamkeit über einen Zeitraum von zwei Jahren, indem in längerfristigen Abständen (monatlich) die Aspekte der wahrgenommenen Arbeitsbelastung, Veränderung von Bewegungsabläufen, quantitativen Entlastung sowie Akzeptanz und Nutzbarkeit erfasst werden, um die Veränderung dieser Parameter über die Zeit im Sinne einer Langzeitwirkung beurteilen zu können. Neben der Anwendung für die Auswahl und Einführung von Exoskeletten lässt sich das beschriebene Vorgehen auch auf weitere ergonomische Unterstützungssysteme (Maßnahmen), z.B. Hebehilfsmittel, übertragen.
Anwendungsbeispiele
Die Phase 1 des Vorgehensmodells soll anhand von zwei Anwendungsbeispielen exemplarisch dargestellt werden. Als erstes Anwendungsbeispiel wird das Szenario einer Containerentladung betrachtet. In einem typischen Container für den Transport von Waren sind in der Regel mehrere Pakete gestapelt, die von den Arbeitskräften entnommen werden müssen und auf Paletten gestapelt werden. Die Tätigkeit wurde mit der LMM für Heben, Halten und Tragen mit einer Bewertung von 189 für Männer und 207 für Frauen als hohe Belastung eingestuft. Damit sind Maßnahmen zur Gestaltung erforderlich. Die Aufgabe ist im Bereich der Logistik, die Tätigkeit ist Heben, Halten und Tragen. Die Bewegungen der Arbeitskräfte, die zwischen dem Container und der Palette agieren, sind durch eine dynamische Körperhaltung gekennzeichnet. Um die Pakete aus dem Container zu entnehmen, müssen die Arbeitskräfte häufig über Kopf und unterhalb der Hüfte arbeiten, je nach Schichthöhe der Pakete. Unterstützt werden soll vor allem der Rücken mit hoher Unterstützungsleistung. Bei Arbeiten im Container empfiehlt sich ein körpernahes Exoskelett, aufgrund des engen Raumes. Mithilfe der Exoskelett-Morphologie für eine anwendungsspezifische Lösungsauswahl und dem erstellten Tätigkeitsprofil konnten zwei Exoskelette vorgeschlagen werden. Zum einen das passive Exoskelett Laevo V2 und das aktive Exoskelett Japet W+.
Als zweites Anwendungsbeispiel wird das Szenario der Palettierung betrachtet. Die Pakete weisen unterschiedliche Gewichte auf und werden von einer Palette entnommen und auf eine andere neu gestapelt, wobei die Tätigkeit nicht den ganzen Tag durchgeführt wird. Die Tätigkeit wurde mit der LMM für Heben, Halten und Tragen mit einer Bewertung von 72 für Männer und 83 für Frauen als wesentlich erhöhte Belastung eingestuft. Damit sind Maßnahmen zur Gestaltung zu prüfen. Die Aufgabe ist ebenso im Bereich der Logistik, die Tätigkeit ist Heben, Halten und Tragen. Die Tätigkeit erfordert von den Arbeitskräften eine dynamische Körperhaltung, während sie zwischen den beiden Paletten agiert. Beim Aufnehmen und Platzieren ist die Arbeitshöhe überwiegend unterhalb der Brust. Auch hier soll vor allem der Rücken entlastet werden mit mittlerer Unterstützungsleistung. Das Exoskelett sollte für diese Tätigkeit über eine einstellbare Unterstützung während des Tragens verfügen, um passend zu den unterschiedlichen Paketgewichten zu unterstützen. Mithilfe der Exoskelett-Morphologie für eine anwendungsspezifische Lösungsauswahl und dem erstellten Tätigkeitsprofil konnten fünf Exoskelette vorgeschlagen werden. Darunter sind die Exoskelette Bionic-Back, SoftExo Lift 5, Ottobock BackX, HAL Lumbar und CarrySuit.
Diskussion und Ausblick
Ausgehend von der Problemstellung der gesundheitlichen Belastung von vielen manuellen Tätigkeiten in der Intralogistik, wurde die Frage untersucht, wie Exoskelette systematisch und ganzheitlich für verschiedene Prozesse auf Grundlage von Systemkritiken ausgewählt werden können. Bisherige Vorgehensmodelle können häufig nur Exoskelett-Arten empfehlen, allerdings keine konkreten Modelle für spezifische Prozesse vorschlagen. Bestehende Plattformen, die eine Übersicht über verschiedene Systeme geben, variieren häufig im Lösungsumfang und erlauben keine direkte Zuordnung zu den Tätigkeiten. Daher wurde eine Exoskelett-Morphologie für eine anwendungsspezifische Lösungsauswahl entwickelt, anhand derer 68 Lösungen klassifiziert wurden. Die berücksichtigten Systeme werden zukünftig durch Weiterentwicklungen und neue Produkte nicht mehr aktuell sein. Es besteht daher weiterführender Forschungsbedarf dahingehend, wie eine fortlaufend aktuelle Katalogisierung und vor allem auch eine Erweiterung mit neuen Systemen möglich ist, um Exoskelette für unterschiedliche Prozesse auswählen zu können. Die Phase 1 des vorgestellten Vorgehensmodells zur Auswahl und Einführung ergonomischer Unterstützungssysteme konnte an zwei Anwendungsbeispielen dargestellt werden. Zukünftig sollen auf Basis des Modells nicht nur Exoskelette, sondern auch andere Systeme und Maßnahmen zur gesundheitsförderlichen Arbeitsgestaltung vorgeschlagen werden. Eine Übertragbarkeit muss noch in weiteren Forschungen überprüft werden. Im nächsten Schritt wird zunächst die Phase 2 und Phase 3 des Vorgehensmodells in Unternehmen an unterschiedlichen Prozessen getestet und validiert.
Hinweis
Bei diesem Beitrag handelt es sich um einen von den Mitgliedern des ZWF-Advisory-Board wissenschaftlich begutachteten Fachaufsatz (Peer Review).
Funding statement: Dieser Beitrag entstand im Rahmen des Projekts „Verbundprojekt: RessourcenEntwicklung in Dienstleistungsarbeit (RessourcE)“. Dieses Forschungs- und Entwicklungsprojekt wird durch das Bundesministerium für Bildung und Forschung (BMBF) im Programm „Zukunft der Wertschöpfung – Forschung zu Produktion, Dienstleistung und Arbeit“ (FKZ: 02L22C152) gefördert und vom Projektträger Karlsruhe (PTKA) betreut.
About the authors
Birte Pupkes, M. Sc., arbeitet als Wissenschaftliche Mitarbeiterin am BIBA und beschäftigt sich mit Exoskeletten für Mitarbeiter in der Logistik.
Nils Hoppe, M. Sc., arbeitet als Wissenschaftlicher Mitarbeiter am BIBA und beschäftigt sich mit technischen Logistiksystemen und Methoden zur anforderungsgerechten Lösungsauswahl.
Christoph Petzoldt, M. Sc., leitet die Abteilung Robotik und Automatisierung am BIBA – Bremer Institut für Produktion und Logistik und beschäftigt sich mit Assistenzsystemen und Mensch-Technik-Interaktion.
Prof. Dr.-Ing. Michael Freitag ist Direktor des BIBA und leitet das Fachgebiet Planung und Steuerung produktionstechnischer und logistischer Systeme (PSPS) im Fachbereich Produktionstechnik der Universität Bremen.
Literatur
1 Bertram, P.; Max, B.; Quint, F.; Ruskowski, M.: Informationsmodellierung zur Beschreibung manueller Tätigkeiten an Handarbeitsplätzen. In: Mensch und Computer 2017 – Workshopband. Online unter https://dl.gi.de/items/de26a836-9ba9-435f-8dda-6f06aab6f5f5 [Abruf am 28.03.2024]Search in Google Scholar
2 Deutsche Gesetzliche Unfallversicherung (DGUV): Muskel-Skelett-Belastungen – erkennen und beurteilen (208th Ed.), DGUV Information. Online unter https://publikationen.dguv.de/widgets/pdf/download/article/458 [Abruf am 28.03.2024]Search in Google Scholar
3 Meyer, M.; Wing, L.; Schenkel, A;. Meschede, M.: Krankheitsbedingte Fehlzeiten in der deutschen Wirtschaft im Jahr 2020. In: Badura, B.; Ducki, A.; Schröder, H.; Meyer, M. (Hrsg.): Fehlzeiten-Report (Vol. 2021), Betriebliche Prävention stärken – Lehren aus der Pandemie. Springer Verlag, Berlin, Heidelberg 2021, S. 441–538. Online unter https://link.springer.com/chapter/10.1007/978-3-662-63722-7_27 [Abruf am 28.03.2024] 10.1007/978-3-662-63722-7_27Search in Google Scholar
4 Bundesanstalt für Arbeitsschutz und Arbeitsmedizin (BAuA): Volkswirtschaftliche Kosten durch Arbeitsunfähigkeit (2022). Online unter https://www.baua.de/DE/Themen/Monitoring-Evaluation/Zahlen-Daten-Fakten/Kosten-der-Arbeitsunfaehigkeit.html [Abruf am 28.03.2024]Search in Google Scholar
5 Hermeier, B.; Heupel, T.; Fichtner-Rosada, S. (Hrsg.): Arbeitswelten der Zukunft: Wie die Digitalisierung unsere Arbeitsplätze und Arbeitsweisen verändert. Springer-Gabler-Verlag, Wiesbaden 2019 10.1007/978-3-658-23397-6Search in Google Scholar
6 Statistisches Bundesamt (Hrsg.): Demographischer Wandel. Online unter https://www.destatis.de/DE/Themen/Querschnitt/Demografischer-Wandel/_inhalt.html#120368 [Abruf am 28.03.2024]Search in Google Scholar
7 Bundesanstalt für Arbeitsschutz und Arbeitsmedizin (BAuA): Gefährdungsbeurteilung bei physischer Belastung – die neuen Leitmerkmalmethoden (LMM), 2019. Online unter https://www.baua.de/DE/Angebote/Publikationen/Bericht-kompakt/F2333.html [Abruf am 28.03.2024]Search in Google Scholar
8 Steinhilber, B. et al.: Einsatz von Exoskeletten im beruflichen Kontext zur Primär-, Sekundär- und Tertiärprävention von arbeitsassoziierten muskuloskelettalen Beschwerde. Zeitschrift für Arbeitswissenschaft 74 (2020) 3, S. 227–246 10.1007/s41449-020-00226-7Search in Google Scholar
9 Bundesanstalt für Arbeitsschutz und Arbeitsmedizin (BAuA): TRGS 500 Schutzmaßnahmen: Technische Regel für Gefahrstoffe, Gemeinsames Ministerialblatt (Fassung 01.04.2021). Ausschuss für Gefahrstoffe, Berlin 2021Search in Google Scholar
10 EscobarToledo, C. E.; Martinez-Berumen, H. A.: Strategic Development of a Decision Making Support System in a Public R & D Center. International Journal of Decision Support System Technology 3 (2011) 2, S. 32–43 10.4018/jdsst.2011040103Search in Google Scholar
11 Hoppe, N. H.; Rolfs, L.; Petzoldt, C.; Putzka, A.; Freitag, M.: Planung und anforderungsgerechte Auswahl von FTS/Requirement-Appropriate Recommendation for Automated Guided Vehicle Systems. wt Werkstattstechnik online 112 (2022) 4, S. 232–237 10.37544/1436-4980-2022-04-32Search in Google Scholar
12 Hoppe, N. H.; Freitag, M.: Implementation and Evaluation of an Assistance Software to Support Decision-Making, Design and Simulation Setup for Automated Guided Vehicle Systems. IFAC-PapersOnLine 56 (2023) 2, S. 10345–10350 10.1016/j.ifacol.2023.10.1045Search in Google Scholar
13 Vorobiev, A. A.; Andrutshenko, F.; Zasypkina, O. A.; Solovieva, I. O.; Krivonozhkina, P.; Pozdnykov, A. M.: Terminology and Classification of Exoskeleton. Journal of Volgograd State Medical University 12 (2015) 3, S. 71–77Search in Google Scholar
14 Goehlich, R.; Krohne, I.; Weidner, R.; Gimenez, C.; Mehler, S.; Isenberg, R.: Exoskeleton Portfolio Matrix: Organizing Demands, Needs and Solutions from an Industrial Perspective. In: Weidner, R. (Hrsg.): Konferenzband „Technische Unterstützungssysteme, die die Menschen wirklich wollen“ – Zweite transdisziplinäre Konferenz. Helmut-Schmidt-Universität, Hamburg 2016, S. 147–156Search in Google Scholar
15 Weidner, R.; Karafillidis, A.: Distinguishing Support Technologies. A General Scheme and Its Application to Exoskeletons. In: Karafillidis, A.; Weidner, R. (Hrsg.): Biosystems & Biorobotics, Developing Support Technologies. Springer International Publishing, Cham 2018, S. 85–100 10.1007/978-3-030-01836-8_8Search in Google Scholar
16 Weidner, R.; Linnenberg, C.; Hoffmann, N.; Prokop, G.; Edwards, V.: Exoskelette für den industriellen Kontext: Systematisches Review und Klassifikation. In: Digitale Arbeit, digitaler Wandel, digitaler Mensch? Dokumentation des 66. Arbeitswissenschaftlichen Kongresses, Berlin 2020Search in Google Scholar
17 Voilque, A.; Masood, J.; Fauroux, J. C.; Sabourin, L.; Guezet, O.: Wearable Robotics Association Conference (WearRAcon). IEEE, Piscataway, NJ 2019. Online unter https://ieeexplore.ieee.org/servlet/opac?punumber=8713400, [Abruf am 28.03.2024]Search in Google Scholar
18 Matokhina, A.;Kravets, A. G.; Volodina, D.; Dragunov, S.; Shashkov, V.: Analysis of Dynamics in Human—Exoskeleton Collaborative System. In: Kravets, A. G. (Hrsg.): Studies in Systems, Decision and Control, Robotics: Industry 4.0 Issues & New Intelligent Control Paradigms. Springer International Publishing, Cham 2020, S. 89–109 10.1007/978-3-030-37841-7_8Search in Google Scholar
19 de La Tejera, J. A.; Bustamante-Bello, R.; Ramirez-Mendoza, R. A.; Izquierdo-Reyes, J.: Systematic Review of Exoskeletons towards a General Categorization Model Proposal. Applied Sciences 11 (2021) 1, S. 76, 10.3390/app11010076Search in Google Scholar
20 Tiboni, M.; Borboni, A.; Vérité, F.; Bregoli, C.; Amici, C.: Sensors and Actuation Technologies in Exoskeletons: A Review. Sensors 22 (2022) 3, 884 10.3390/s22030884Search in Google Scholar PubMed PubMed Central
© 2024 Birte Pupkes, Nils Hoppe, Christoph Petzoldt, Michael Freitag, publiziert von De Gruyter
Dieses Werk ist lizensiert unter einer Creative Commons Namensnennung 4.0 International Lizenz.
Articles in the same Issue
- Frontmatter
- Editorial
- Wir brauchen den Menschen in der Fabrik!
- Fabrikplanung
- Die Matrix der vier Limitationstypen in der Fabrikplanung
- Adaption von Fabrikstrukturen unter Berücksichtigung von Veränderungsfähigkeiten
- Kreislaufwirtschaft
- Anreize für die Rückführung von Produkten in der Kreislaufwirtschaft
- Kompetenzmanagement
- Prognosebasierte Kompetenzbewertung für einen nachhaltigen Aufbau von Schlüsselkompetenzen
- Wissensmanagement
- Wissensmanagement im Mittelstand
- Wissensmanagement in KMU
- Change Management
- Nachhaltige Steigerung der Produkt- und Prozessqualität
- Wandlungsfähigkeit
- DreMoWabe – Dresdner Modell der Wandlungsbefähigung
- Kollaboration
- Regressionsbasierte Ermittlung von Ausführungszeiten in Mensch-Roboter-Kollaboration
- Ergonomie
- Exoskelette in der Intralogistik
- Fachkräftemangel
- Gewinnung und Bindung von Fachkräften
- Maschinelles Lernen
- Der Mensch in der intelligenten Fabrik
- Digitale Transformation
- Bereit für die Digitale Transformation?
- Assistenzsysteme
- Humanzentrierter Gestaltungsprozess eines intelligenten Assistenzsystems in der manuellen Montage
- Unterstützung von Mitarbeitenden in Montagelinien
- Datenanalyse
- Der Ursache auf der Spur
- Eye Tracking
- Eye-Tracking-basierte Analyse des menschlichen Verhaltens
- Vorschau
- Vorschau
Articles in the same Issue
- Frontmatter
- Editorial
- Wir brauchen den Menschen in der Fabrik!
- Fabrikplanung
- Die Matrix der vier Limitationstypen in der Fabrikplanung
- Adaption von Fabrikstrukturen unter Berücksichtigung von Veränderungsfähigkeiten
- Kreislaufwirtschaft
- Anreize für die Rückführung von Produkten in der Kreislaufwirtschaft
- Kompetenzmanagement
- Prognosebasierte Kompetenzbewertung für einen nachhaltigen Aufbau von Schlüsselkompetenzen
- Wissensmanagement
- Wissensmanagement im Mittelstand
- Wissensmanagement in KMU
- Change Management
- Nachhaltige Steigerung der Produkt- und Prozessqualität
- Wandlungsfähigkeit
- DreMoWabe – Dresdner Modell der Wandlungsbefähigung
- Kollaboration
- Regressionsbasierte Ermittlung von Ausführungszeiten in Mensch-Roboter-Kollaboration
- Ergonomie
- Exoskelette in der Intralogistik
- Fachkräftemangel
- Gewinnung und Bindung von Fachkräften
- Maschinelles Lernen
- Der Mensch in der intelligenten Fabrik
- Digitale Transformation
- Bereit für die Digitale Transformation?
- Assistenzsysteme
- Humanzentrierter Gestaltungsprozess eines intelligenten Assistenzsystems in der manuellen Montage
- Unterstützung von Mitarbeitenden in Montagelinien
- Datenanalyse
- Der Ursache auf der Spur
- Eye Tracking
- Eye-Tracking-basierte Analyse des menschlichen Verhaltens
- Vorschau
- Vorschau