Matching estimators of causal effects in clustered observational studies
-
Can Cui
 ,
Shu Yang
,
Shu Yang

Abstract
Marine conservation preserves fish biodiversity, protects marine and coastal ecosystems, and supports climate resilience and adaptation. Despite the importance of establishing marine protected areas (MPAs), research on the effectiveness of MPAs with different conservation policies is limited due to the lack of quantitative MPA information. In this article, by leveraging a global MPA database, we investigate the causal impact of MPA policies on fish biodiversity. To address challenges posed by this clustered and confounded observational study, we construct a bias-corrected matching estimator of the average treatment effect assuming treatment is assigned at the cluster level and a cluster-weighted bootstrap method for variance estimation. We establish the theoretical guarantees of the matching estimator and its variance estimator. Under our proposed matching framework, we recommend matching on both cluster-level and unit-level covariates to achieve efficiency. The simulation study results demonstrate that our matching strategy minimizes the bias and achieves the nominal confidence interval coverage. Applying our proposed matching method to compare different MPA policies reveals that the no-take policy is more effective than the multi-use policy in preserving fish biodiversity.
1 Introduction
1.1 Causal impact of marine protected areas (MPAs) on biodiversity
Preserving marine biological diversity is an important objective of governments, scientists, local communities, and conservationists. MPAs have been established worldwide to keep sustainable and resilient marine ecosystems by restricting destructive and extractive activities within their boundaries [1,2]. Despite widespread use, the effectiveness of many MPAs and different types of MPA policies in conserving marine biodiversity remains unclear [1]. Very few studies employ rigorous causal inference methods to assess MPA impacts and even less so to investigate the relative effects of different conservation policies [3]. Such studies, however, are important and have significant policy implications, as prohibiting fishing activities that are potentially important for local food and livelihood security can result in significant social costs and harm (e.g., Kamat [4], Bennett and Dearden [5]).
Gill et al. [6] investigated the effectiveness of MPA management and its impacts on fish populations. They developed a database of ecological, management, social, and environmental conditions in and around hundreds of MPAs globally. In their study, management attributes such as available capacity were strongly associated with increases in fish biomass observed in MPAs. Nonetheless, the relative effects of different types of MPAs (referred to as policies or treatments), such as those that restrict fishing (hereafter called multiuse (MU) MPAs) and those that prohibit all fishing (hereafter called no-take (NT) or MPAs) require further investigation.
While the Gill et al. [6] database represents one of the largest global datasets of MPA conditions and ecological outcomes to date, its properties present significant challenges for applying traditional causal inference methods. First, given the intractability of conducting randomized experiments in many conservation settings, the global MPA dataset is observational and thus subject to confounding biases not present when treatment is randomized [7]. MU and NT MPAs are likely to be located in areas with different social, environmental, and regulatory conditions. Direct comparisons of the biodiversity between MU and NT MPAs are fallible. Second, the MPA data are spatially clustered as nearby sites are usually under the same conservation policy, whether it be because they lie within the same MPA, specific management zone within an MPA (e.g., no diving area), or larger-scale management policy area (e.g., regional or national level fishing policies). Individual sites also share similar geographical, environmental, and social features that are possibly dependent on each other. Therefore, estimating the causal impacts of policies such as MPAs requires appropriate methods for clustered and confounded data.
1.2 Previous work: Causal inference in observational studies
Although randomized experiments serve as the gold standard, observational studies can estimate causal effects when all confounding variables are well balanced between treatment groups. To adjust for the imbalance in observed confounding covariates, matching [8] is often applied to isolate causal effects due to its transparency and intuitive appeal.
While statistical methods to estimate causal effects in observational studies are growing, most methods apply to unstructured data (i.e., without clustering). However, clustering often exists because subjects may be grouped by experimental design, geography, or by sharing higher-level features. Examples include health and educational studies, where patients are nested in hospitals and students are clustered in classrooms or schools. Such clustered data structure poses additional challenges when inferring the causal effect. In our motivating example, the MPA database is naturally clustered, where several sites are nested in the MPA. Capturing MPA level as well as site-level features (e.g., local social or environmental conditions) is important to remove confounding biases when evaluating the effectiveness of environmental policies.
To estimate causal effects in clustered data, Cafri et al. [9] showed that treatment effect estimation is more accurate when accounting for cluster-level confounding variables. Even if sufficient individual-level covariates are included, ignoring cluster-level confounding covariates would leave a bias in estimation. In the matching framework, Zubizarreta and Keele [10] developed an algorithm for optimal cardinality matching, designed to balance covariate distributions between groups. However, this approach does not necessarily yield the most efficient estimator for the average treatment effect (ATE). Several alternative methods incorporating propensity scores have been proposed for clustered data [11–13]. For a comprehensive review of propensity score methods in clustered observational studies, see the study by Chang and Stuart [14]. However, King and Nielsen [15] discussed the inefficiency and failure of balancing covariate distributions between treatment groups using the propensity score. They attribute the inefficiency of matching on propensity scores to its goal of mimicking a completely randomized trial rather than a block-randomized trial as well as error in estimating the propensity score.
1.3 Our contribution: a matching strategy in clustered observational studies
This article focuses on matching as a nonparametric approach and intuitively mimics a cluster-randomized experiment. We aim to estimate the causal effect by matching estimators under the framework in Abadie and Imbens [16]. Following the characteristics in the MPA database, we analyze the clustered data where the treatment is clustered within the MPA. Nearby sites tend to be assigned the same MPA policy, and one MPA usually contains a single policy only. Cluster-level and unit-level covariates are available, and the outcome is collected at the unit level. To account for the conditional bias when matching on multiple covariates, we adopt the bias-corrected matching estimator [17] in clustered data for two common estimands, the ATE and average treatment effect on the treated, and establish the large sample properties. Under this data structure, matching on cluster-level covariates is sufficient to remove the confounding biases. However, we recommend including relevant unit-level covariates in matching to achieve higher efficiency and lower variance. We show reduced variance in theory and simulation to demonstrate the advantages of matching on both cluster-level and unit-level covariates.
To account for clustered dependence, we propose a cluster-weighted bootstrap method for variance estimation, which combines the idea of cluster bootstrap [18] and weighted bootstrap [19]. Based on a linearization of the matching estimator, the weighted bootstrap method creates residuals so that matching estimators can be viewed as the sample averages of residuals. The variance of the matching estimator can then be approximated by bootstrapping the residuals with appropriate weights. This method preserves the distribution of the number of times that each unit is matched in the resampling procedure. Thus, it avoids the failure of the standard bootstrap in this setting, as discussed by Abadie and Imbens [20].
The rest of this article is organized as follows. In Section 2, we introduce the motivating data and describe challenges in establishing causal effects due to the nature of the data structure. Section 3 introduces the notation, assumptions, and estimands of interests. Section 4 explores the large sample properties of matching estimators in clustered data. Section 5 presents the cluster-weighted bootstrap procedure for variance estimation. In Section 6, we apply the proposed matching estimator in the MPA data to investigate the causal effect of different marine protection policies on fish biodiversity. In Section 7, a simulation study is reported to evaluate the performance of the proposed matching estimator in clustered data. Finally, we conclude our findings in Section 8.
2 MPA data and exploratory analysis
The MPA dataset created by Gill et al. [6] includes social, environmental, and ecological information in 9987 sites within 215 MPAs worldwide (Figure 1). The number of sites in each MPA ranges from 1 to 1619, with a mean of 46 and a median of 8. Among 9987 sites, 3988 sites receive the NT policy, whereas 5999 are under the MU policy. The outcome variable is total fish biomass at each site, recorded in underwater visual surveys. There are 13 continuous covariates and 4 categorical covariates that describe the MPA-level and site-level features (Table 1). MPA-level covariates include MPA size and country. The other covariates include site-level social and environmental conditions, as well as sampling protocol, location, and date.
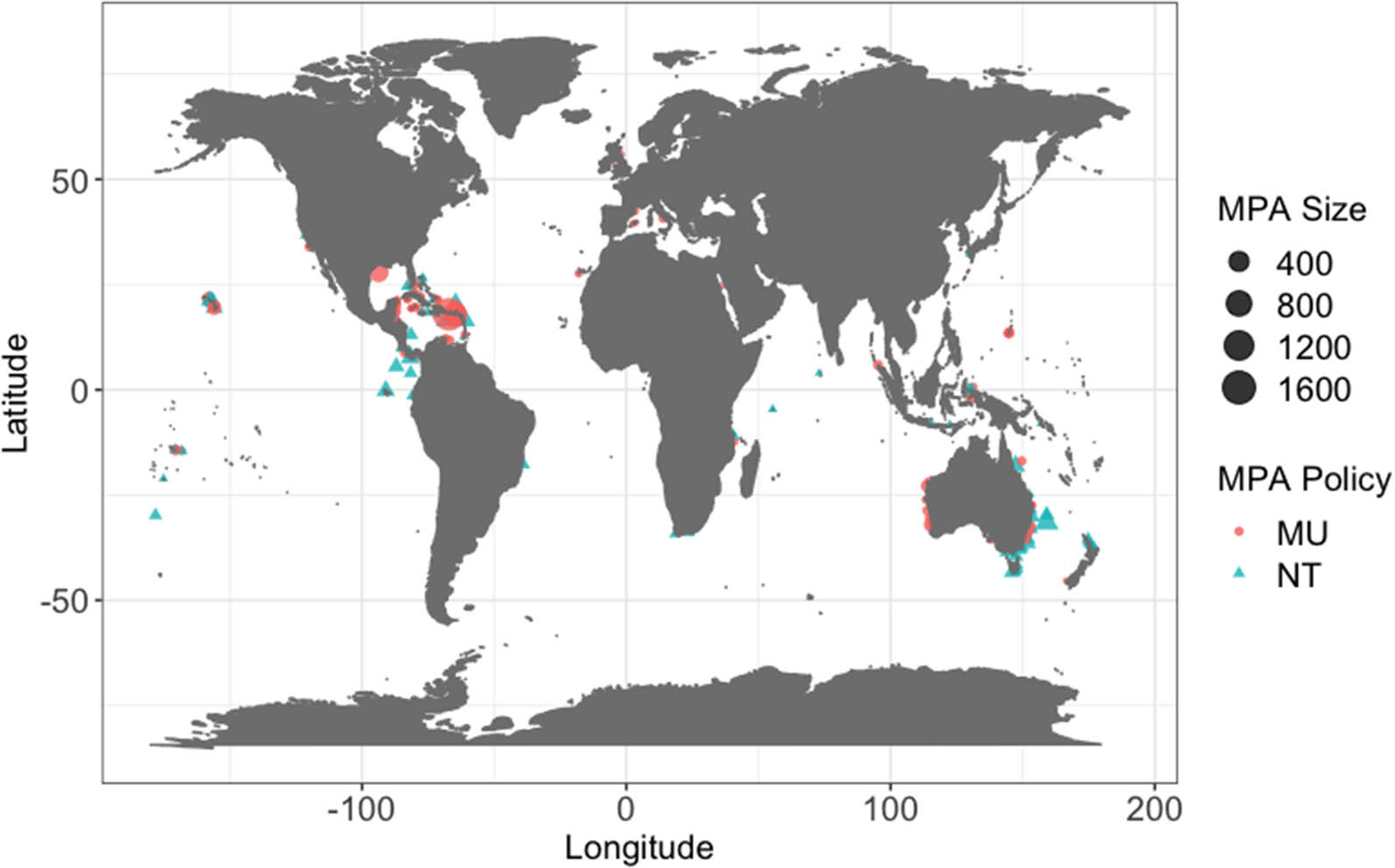
Map showing MPA location, size and policy type (MU = multi-use, NT = no-take); MPA policies are present by the majority within each MPA.
Feature list in the MPA database with units in parentheses for continuous variables and number of levels in parentheses for categorical variables
| Site-level covariates | MPA-level covariates | |
|---|---|---|
| Continuous (13) | Latitude (degree) | MPA size (
|
| Longitude (degree) | ||
| Depth (m) | ||
| Wave exposure (kW/m) | ||
| Distance to shoreline (km) | ||
| Distance to population center (“market”; km) | ||
| Coastal population (million/100
|
||
| Sample date (year) | ||
| Minimum sea surface temperature (°C) | ||
| Chlorophyll-A (
|
||
| Reef area within 15 km (
|
||
| MPA age (years) | ||
| Categorical (4) | Habitat type (16) | Country |
| Marine ecoregion (56) | ||
| Sampling protocol (6) |
Sites within the same MPA usually receive the same policy (i.e., same fishing regulations), and each site belongs only to one MPA. As a result, the dataset is naturally clustered where observed sites are nested within the MPA, and conservation policies are geographically clustered. The cluster structure brings difficulty in causal inference due to potential confounding. Both cluster-level and site-level covariates could contribute to the confounding bias. Sites in the same MPA share common environmental, MPA-level, and geographical characteristics, affecting both the fish population and MPA policy assignment [3,6,21]. Site-specific covariates, including depth, distance to population centers (also called “markets”), size of neighboring human population, and chlorophyll concentration, are also relevant to the ecological outcome [6,22–24]. Within the same MPA, implementing either the MU or NT policy could be heavily influenced by preexisting ecological conditions, local tourism, fishing, or politics [25,26], which are ideally captured as site-specific covariates.
Confounding and clustering present two major challenges. We compare the covariate distributions under the two MPA policies for both unadjusted and adjusted samples. The unadjusted sample refers to the raw observation, while the adjusted sample results from multiple matching (one-to-three) using the Mahalanobis distance and with replacement. A hypothetical example to illustrate the applied multiple matching is provided in Supplementary Material S6, Figure S1.
Figure 2 (a) describes the covariate balance by calculating the standardized mean difference for unadjusted and adjusted samples. For the unadjusted sample, differences between two MPA policies among covariates suggest a nontrivial impact of confounding. After matching, many covariates become more balanced; however, due to the matching discrepancy (since matching a large dimension of covariates), several covariates still exhibit severe imbalance, requiring further adjustments for residual confounding bias. An example of seven selected MPA locations in New Zealand is plotted in Figure 2(b), where six are under the NT policy while the other is under the MU policy. Here, different MPAs contain different numbers of sites, ranging from 1 to 29. Figure 2(b) shows a type of clustering pattern in this MPA global dataset that nearby MPAs tend to follow the same policy. It is practically reasonable because similar regions are likely to share common environmental, geographical, and local governmental characteristics, which impact fish biodiversity and MPA policies’ choice. Therefore, to explore the causal effect of MPA policies on fish biodiversity, methods that account for both the cluster-level and site-level confounding factors are desired.
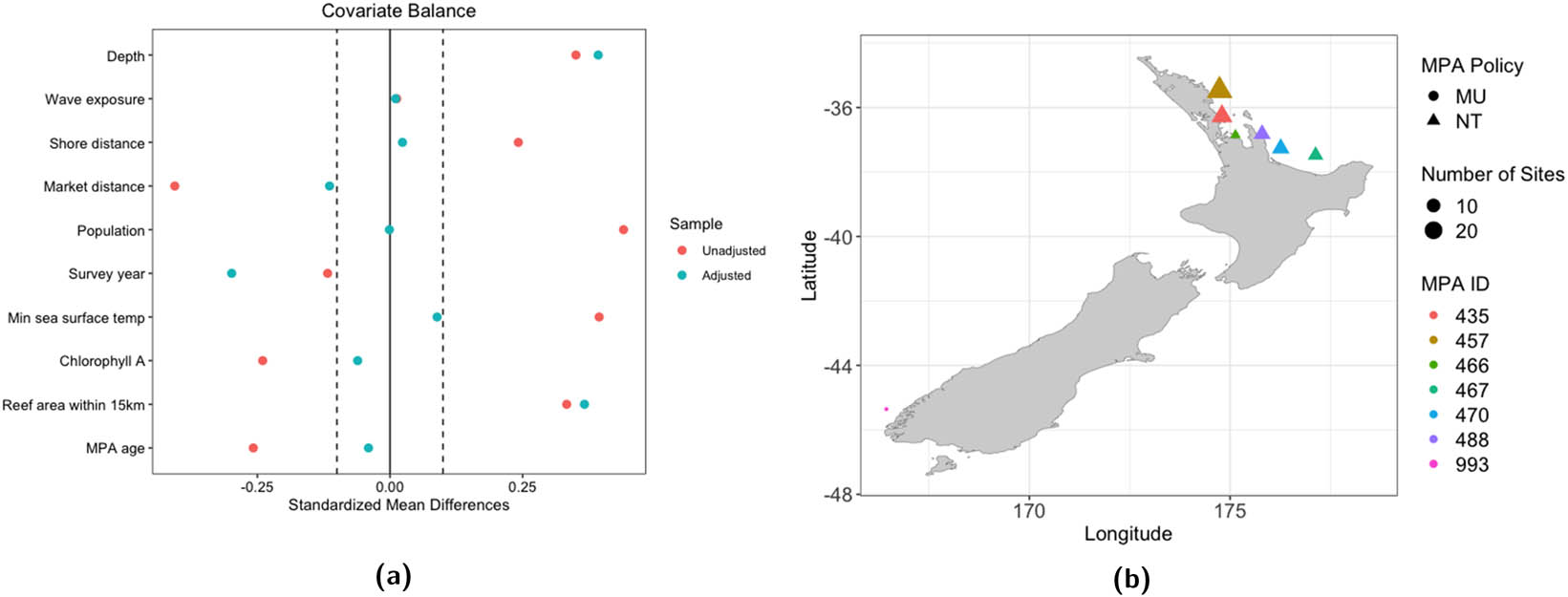
Challenges in MPA global dataset. (a) Covariate balance between unadjusted and adjusted situations and (b) MPAs in New Zealand.
3 Notation, assumptions, and estimands
To establish causal effect in clustered observational studies, we build our proposed matching strategy based on the potential outcomes framework [27–30], also known as the Neyman-Rubin causal model. Under the potential outcomes framework, the unit-level causal effect is defined as the difference between the outcomes under treatment and control in the same unit. Since we always observe only one of the outcomes for a single unit in reality, it is also considered a missing data problem.
Several works under the potential outcomes framework have been proposed for clustered data [11,13,31–35]. Distinguished from the existing literature, we focus on the setting where treatment is assigned at the cluster level and leverage the framework of matching estimators in the study by Abadie and Imbens [16] for causal inference.
Suppose for units
To define the potential outcomes model, we introduce additional notation. Given
where
We adopt the matching estimator proposed in Abadie and Imbens [16] and extend to clustered data. Each unit is matched to the closest
To establish a valid causal effect in clustered data, we visit the necessary assumptions. We first retain the stable unit treatment values assumption (SUTVA), that is, the potential outcomes for each unit are not influenced by the treatment assigned to other units. While the SUTVA is a strong assumption, it is plausible in our case where most sites within one MPA received the same policy and MPAs are in general geographically separated from each other. We then modify the strong ignorability assumption in our setting, where treatments are assigned at the cluster level. Under the SUTVA and modified strong ignorability assumptions,
Assumption 1
(i)
Assumption 1 suggests conditional independence between treatment
The matching estimator for the ATE in clustered data is
which can be rewritten as follows:
Note that the denominator is
where
For the ATT in clustered data, the strong ignorability assumption can be relaxed as in the unstructured data as well.
Assumption 2
(i)
The estimator of the ATT can be written as follows:
where
where
Consistent with the findings in unstructured data, the matching discrepancies of the ATE and ATT estimators come from the conditional bias terms
and
4 Large sample properties
In our clustered data setting, matching on cluster-level covariates is sufficient to account for the confounding variables. However, motivated by blocked randomized experimental designs, matching on both cluster-level and unit-level covariates may improve efficiency. To compare the two matching schemes, we denote
To illustrate the role of the matching scheme, for a general random variable
Theorem 1
Suppose
Assumption 1, and Assumptions S1 and S2 in Supplementary Material Section S1 hold. Suppose that the cluster sample size we have, for
where
Theorem 2
Suppose
Assumptions 2, and S1 and S2 in Supplementary Material Section S1 hold. Suppose that the cluster sample size we have for
where
The asymptotic variances for the two estimators involve the variances of residual terms, i.e.,
Consider two matching schemes, i.e.,
5 Variance estimation
Variance estimation for matching estimators has been investigated in both parametric and nonparametric ways. In the study by Abadie and Imbens [16], an analytic form for the large sample variance is proposed with consistency achieved. Although the bootstrap method [36] is widely used to calculate standard errors for estimators with complicated forms, Abadie and Imbens [20] showed that the standard bootstrap is invalid for matching estimators. The bootstrap method does not preserve the distribution of
Due to the complex analytic form of matching estimators in clustered data, we employ resampling methods to estimate the variance of the matching estimator and leverage the general procedure of the weighted bootstrap. To account for the dependence in the linear terms in the weighted bootstrap, we incorporate the cluster bootstrap for variance estimation. We describe the extension of weighted bootstrap in clustered data for the ATE first and present the procedure for our cluster weighted bootstrap method. A similar procedure for the ATT is summarized in Supplementary Material S4.
Theorem 1 states that under certain conditions, the bias-corrected estimator
where
where
On the basis of this form, we express the
where
and
Alternatively, we propose a cluster-level weighted bootstrap method following Otsu and Rai [19]. The key idea is to treat
Considering the clustered data where unobserved cluster-level confounding covariates could exist across and within clusters, we adopt the cluster bootstrap method [18] to account for the variance from potential cluster-level covariates. The cluster bootstrap suggests resampling on the cluster levels first and then including all observations within selected units. By incorporating the weighted bootstrap algorithm, we propose our cluster-weighted bootstrap method as follows. The weights can be generated from multinomial random variables
Step 1: Obtain the weighted bootstrap samples
Step 2: For clustered data with
Step 3: Include all
Step 4: Obtain a bootstrap replicate as
Step 5: Repeat the Step 1–4
Theorem 3
Suppose that
Assumption 1
and S1, S3 in Supplementary Material S3 hold. Suppose that the cluster sample size we have, for
where
Proof for Theorem 3 is detailed in Supplementary Material S3.
6 Analysis of conservation policy effects on marine biodiversity
The proposed matching framework is applied to the Gill et al.’s [6] MPA dataset to investigate the causal relationship between MPA policies and fish biodiversity. We consider MU as the treatment while the NT serves as the control. Two estimands are of interest, i.e.,
Table 2 summarizes the estimated ATE and ATT with 95% confidence intervals under different matching strategies. When matching only on MPA-level covariates, all three methods result in negative point estimates for ATE and ATT. However, none detect significant differences between the MU and NT policy on fish biomass. When matching on both MPA-level and site-level covariates, the sieve method shows significantly different impacts of MPA policies on fish biomass. The ATE under the sieve method is significantly negative, suggesting that the NT policy is more beneficial to fish biodiversity. The result of the ATT by using the sieve method is consistent with the ATE result, which shows a positive impact of using the NT policy. Comparing the procedures between matching on MPA-level covariates and matching on all relevant covariates, we find a reduced estimated variance under the sieve method as expected when including individual covariates that are relevant to the outcome.
Summary of the ATE and the ATT with estimated standard errors in parentheses when comparing the MU policy and NT policy in MPAs where MU is considered as treatment group; Response is
| ATE | ATT | |||
|---|---|---|---|---|
| Point estimate | 95% CI | Point estimate | 95% CI | |
| Matching on MPA-level covariates | ||||
| Sieve method |
|
(
|
|
(
|
| Smooth spline |
|
(
|
|
(
|
| Regression forest |
|
(
|
|
(
|
| Matching on all covariates | ||||
| Sieve method |
|
(
|
|
(
|
| Smooth spline |
|
(
|
|
(
|
| Regression forest |
|
(
|
|
(
|
In these MPA data, several site-level covariates such as distance to markets, reef area within 15 km, and neighboring human population size are relevant to the fish biodiversity under either the MU or NT policy (Figure S2 in Supplementary Material S6). Certain regions at the habitat, country and ecoregion levels also show an important association with the fish biodiversity. Taking these covariates into account for matching helps reduce the matching variance. Using the regression forest method also reveals the beneficial effect of the NT policy for the estimated ATE, while the effect is barely detected for the ATT.
7 Simulation study
We conduct a simulation study to evaluate the finite-sample performance of matching estimators when matching on cluster-level covariates only or matching on both cluster-level and unit-level covariates, and compare the proposed cluster weighted bootstrap method with the original weighted bootstrap on variance estimation. Table 3 outlines the two data-generating processes – balanced and unbalanced designs – and the 12 matching estimators, which vary based on the choice of nuisance function estimation, covariates used for matching, and method for variance estimation. Table 4 summarizes the results under different scenarios for the ATE. When matching on the cluster-level covariate, the small biases for both balanced and unbalanced cluster size settings suggest that matching on the cluster-level covariate is sufficient to remove estimation bias for the treatment effect. It is also consistent with the theoretical findings by Abadie and Imbens [16] that the conditional bias is ignorable when matching on a single covariate. When comparing three approaches to approximate the conditional outcome mean functions, the sieve method usually outperforms the other two with the lowest bias. The linear spline method shows advantages in reducing the bias for unbalanced data but suffers from underestimated variance. The regression forest method has the largest absolute bias in most cases.
Comprehensive descriptions and specifications of the simulation study, including the data generating process and the matching schemes employed
| Goal: evaluate the finite-sample performance of matching estimators in various matching schemes | ||
| Simulated data:
|
||
| Cluster | Number of clusters be
|
|
| Balanced clustered data | Unbalanced clustered data | |
| Cluster size
|
Cluster size
|
|
| Confounding variables | Unit-level confounding variables
|
|
| One cluster-level covariate
|
||
| Nonlinear transformations |
|
|
|
|
|
|
|
|
|
|
| The nonlinear function
|
||
| Potential outcomes | The potential outcomes are generated from a mixed-effects model
|
|
| Treatment | The treatment indicator
|
|
| Matching estimators performed through the R package Matching, number of matches
|
||
| Methods to estimate nuisance functions |
|
|
|
|
||
|
|
||
| Matching procedure | Procedure 1: match on the cluster-level covariate and estimate variance by the proposed cluster-weighted bootstrap method | |
| Procedure 2: match on the cluster-level covariate and estimate variance by the standard weighted bootstrap method | ||
| Procedure 3: match on both cluster-level and unit-level covariates and estimate variance by the proposed cluster-weighted bootstrap method | ||
| Procedure 4: match on both cluster-level and unit-level covariates and estimate variance by the standard weighted bootstrap method | ||
| Performance metrics | Bias, average variance, and coverage of 95% confidence intervals over 1000 simulated datasets with
|
|
Summary of bias (
|
|
(50, 10) | (50, 50) | (50, 100) | (50, [20, 100]) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| bias | var | cvg | bias | var | cvg | bias | var | cvg | bias | var | cvg | |
| Procedure 1: matching on cluster covariate only & cluster-weighted bootstrap | ||||||||||||
|
|
|
215 | 96.1 | 17 | 170 | 95.2 |
|
158 | 94.7 |
|
172 | 95.4 |
|
|
33 | 177 | 93.4 | 56 | 148 | 90.8 | 28 | 136 | 92.3 | 13 | 145 | 92.8 |
|
|
|
281 | 97.0 |
|
143 | 91.8 |
|
114 | 89.9 |
|
138 | 92.7 |
| Procedure 2: matching on cluster covariate only & standard weighted bootstrap | ||||||||||||
|
|
|
97 | 85.2 | 17 | 21 | 53.2 |
|
10 | 40.6 |
|
20 | 54.2 |
|
|
33 | 66 | 77.5 | 56 | 14 | 43.3 | 28 | 7 | 34.4 | 13 | 13 | 45.3 |
|
|
|
127 | 88.4 |
|
15 | 48.1 |
|
6 | 33.3 |
|
14 | 48.1 |
| Procedure 3: matching on both cluster and unit covariates & cluster-weighted bootstrap | ||||||||||||
|
|
|
159 | 94.0 |
|
119 | 92.6 |
|
112 | 92.3 |
|
129 | 93.9 |
|
|
33 | 125 | 91.8 | 65 | 104 | 91.0 | 47 | 100 | 90.2 | 39 | 110 | 91.1 |
|
|
|
184 | 93.2 |
|
99 | 89.4 |
|
85 | 89.0 |
|
103 | 90.3 |
| Procedure 4: matching on both cluster and unit covariates & standard weighted bootstrap | ||||||||||||
|
|
|
73 | 80.0 |
|
15 | 50.1 |
|
8 | 35.1 |
|
13 | 47.6 |
|
|
33 | 49 | 73.6 | 65 | 10 | 41.4 | 47 | 5 | 29.9 | 39 | 9 | 42.5 |
|
|
|
87 | 79.4 |
|
11 | 42.5 |
|
5 | 29.1 |
|
9 | 40.6 |
As for variance estimation, the standard weighted bootstrap always results in a much smaller variance than the cluster-weighted bootstrap and thus lower coverage for the 95% confidence interval. By ignoring the cluster effect, the weighted bootstrap method resamples on the unit level such that it fails to approximate the true distribution of matching estimators. On the contrary, by taking clusters into consideration and resampling at the cluster level, our proposed cluster-weighted bootstrap method results in high coverage for the 95% confidence interval.
Comparing procedures 1 and 3, the estimated variances when using both cluster and unit covariates for matching are always smaller than those using only the cluster-level covariate for matching. Though matching on the cluster-level covariate leads to small biases, the consistently reduced estimated variances suggest matching on both cluster-level and unit-level covariates is beneficial and can achieve high coverage for the 95% confidence interval.
When estimating the ATT (Table 5), the sieve method still achieves the most accurate estimation and usually the highest coverage probability. When matching on both cluster and unit covariates, the estimated variance is lower than matching on the cluster-level covariate, and the coverages for the 95% confidence interval are as close to 95% as those when matching on the cluster-level covariate.
Summary of bias (
|
|
(50, 10) | (50, 50) | (50, 100) | (50, [20, 100]) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| bias | var | cvg | bias | var | cvg | bias | var | cvg | bias | var | cvg | |
| Procedure 1: matching on cluster covariate only and cluster-weighted bootstrap | ||||||||||||
|
|
50 | 305 | 96.8 | 17 | 231 | 96.3 | 11 | 226 | 95.9 | 15 | 248 | 97.0 |
|
|
33 | 227 | 93.8 | 37 | 189 | 92.7 | 33 | 183 | 91.9 | 30 | 203 | 93.8 |
|
|
|
358 | 96.6 |
|
169 | 91.7 |
|
141 | 90.3 |
|
178 | 92.9 |
| Procedure 2: matching on cluster covariate only and standard weighted bootstrap | ||||||||||||
|
|
50 | 138 | 89.4 | 17 | 29 | 52.2 | 11 | 15 | 42.3 | 15 | 29 | 53.5 |
|
|
33 | 89 | 80.1 | 37 | 19 | 42.7 | 33 | 10 | 33.7 | 30 | 19 | 44.8 |
|
|
|
168 | 89.0 |
|
20 | 46.5 |
|
8 | 32.0 |
|
19 | 47.7 |
| Procedure 3: matching on both cluster and unit covariates and cluster-weighted bootstrap | ||||||||||||
|
|
228 | 195 | 92.8 | 108 | 139 | 93.4 | 63 | 131 | 93.9 | 88 | 152 | 95.5 |
|
|
46 | 141 | 90.6 | 8 | 114 | 90.7 |
|
110 | 89.1 |
|
122 | 90.0 |
|
|
|
216 | 97.2 |
|
107 | 90.8 |
|
92 | 88.9 |
|
113 | 91.2 |
| Procedure 4: matching on both cluster and unit covariates and standard weighted bootstrap | ||||||||||||
|
|
228 | 92 | 79.7 | 108 | 18 | 50.9 | 63 | 9 | 39.8 | 88 | 16 | 48.6 |
|
|
46 | 58 | 74.5 | 8 | 12 | 41.7 |
|
6 | 30.1 |
|
10 | 41.8 |
|
|
|
105 | 89.8 |
|
13 | 44.5 |
|
6 | 29.3 |
|
10 | 42.3 |
8 Discussion
In this article, we consider matching in a nonparametric way and discuss the matching estimators in clustered observational studies. Large sample properties for two estimands of interest are explored. For variance estimation, we propose a cluster-weighted bootstrap method that avoids the failure of the standard bootstrap and adjusts for the cluster effect. When the treatment assignment occurs at the cluster level, balancing on cluster-level covariates is sufficient to remove confounding biases. However, we recommend that matching on both cluster-level and unit-level covariates is more efficient. The efficiency gain from including individual-level covariates may depend on whether they are correlated to the outcome and can provide additional information other than cluster-level covariates.
Another disadvantage of using cluster-level covariates alone is that when a unit is matched to a cluster with the opposite treatment, the distance to all units within that cluster is identical in the cluster-level covariate space. This can result in a large number of ties, which may vary based on the cluster size. Ties can be handled either deterministically or probabilistically. In our simulation study, we resolve ties by randomly selecting one sample. Alternatively, equal weights could be assigned to each observation within the cluster. However, both approaches may introduce significant bias or variance. To address this, we recommend incorporating unit-level covariates into the matching procedure to help break these ties. This further supports the case for matching on both cluster-level and unit-level covariates, rather than relying solely on cluster-level covariates.
We demonstrate the advantages of matching on both cluster-level and unit-level covariates in theory and simulation. Simulation results show reduced variance when matching on both cluster-level and unit-level covariates in various settings. Compared to the standard weighted bootstrap method widely applied in unstructured data, the proposed cluster-weighted bootstrap outperforms the standard bootstrap with a much higher coverage of 95% confidence interval. Three methods are utilized in constructing the bias-corrected estimators. In our result, the sieve method frequently achieves higher 95% confidence interval coverages and lower biases than the others. However, this may not be a general result, and we recommend evaluating the goodness of fit or conducting model diagnostics when selecting models for the nuisance functions in practice.
We apply the recommended matching strategy to study the ecological effects of different MPA policies on fish biodiversity. When matching on both MPA-level and site-level covariates, the sieve method with cluster-weighted bootstrap successfully detects different ecological impacts between the MU and NT policies. Consistent with the results in the study by Gill et al. [6], we find that the NT policy positively affects the fish population compared to the MU policy. However, there remain several undiscussed aspects. First, the causal effect is estimated under strong assumptions. The SUTVA may be violated when there are multiple versions of MU and NT policies. Second, as discussed in the study by Gill et al. [6], conservation outcomes are closely related to the MPA management processes. Variability in MPA management effectiveness may cause different conservation impacts for the same MPA policy. In future studies, covariates that measure the adequacy and appropriateness of management should be included when comparing the relative causal effects of different MPA policies.
There are several issues that warrant future research. In cases with extremely high-dimensional
Our current analysis and recommendation are based on the clustered data with a binary treatment assignment. This method could be generalized to a complicated data structure involving multilevel clusters with more than two treatment groups or continuous treatments. The benefits of matching estimators by different layers of observed covariates remain unknown. Nonparametric methods for variance estimation in multilevel observational studies would be complicated. Our proposed cluster-weighted bootstrap may be extended to these settings. As with most causal inference methods, we require the SUTVA and strong ignorability of treatment assumptions, which may be violated in some circumstances. It is of interest to study matching estimators in clustered data under relaxed assumptions and develop sensitivity analysis [51] to assess the robustness of the study conclusions to key assumptions.
Acknowledgments
The authors are grateful to the reviewers and editor for their valuable comments, which have significantly improved the manuscript.
-
Funding information: This study was supported by the NIH-NIEHS under grant number 1R01ES031651.
-
Author contributions: All authors accept responsibility for the entire content of this manuscript and have approved its submission. Can Cui developed the main methodology and implemented the simulation and application code. Yunshu Zhang prepared the manuscript, coordinated submissions and revisions, and contributed to writing with input from all co-authors. Shu Yang and Brian Reich contributed to the design of the estimators and the development of the main theoretical results. David Gill provided the dataset and contributed to the application component.
-
Conflict of interest: The authors declare no conflict of interest.
-
Ethical approval: This research does not involve human participants or animal subjects.
-
Data availability statement: The datasets generated and/or analyzed during the current study are available from the corresponding author upon reasonable request.
References
[1] Grorud-Colvert K, Sullivan-Stack J, Roberts C, Constant V, e Costa BH, Pike EP, et al. The MPA guide: A framework to achieve global goals for the ocean. Science. 2021;373(6560):eabf0861. 10.1126/science.abf0861Search in Google Scholar PubMed
[2] UNEP-WCMC, IUCN, NGS. Protected Planet Live Report 2021. Cambridge UK; Gland, Switzerland; and Washington, D.C., USA; 2021. Search in Google Scholar
[3] Ferraro PJ, Sanchirico JN, Smith MD. Causal inference in coupled human and natural systems. Proc Nat Acad Sci USA. 2019;116(12):5311–8. 10.1073/pnas.1805563115Search in Google Scholar PubMed PubMed Central
[4] Kamat V. The ocean is our farm: Marine conservation, food insecurity, and social suffering in Southeastern Tanzania. Human Organization. 2014;73(3):289–98. 10.17730/humo.73.3.f43k115544761g0vSearch in Google Scholar
[5] Bennett NJ, Dearden P. Why local people do not support conservation: Community perceptions of marine protected area livelihood impacts, governance and management in Thailand. Marine Policy. 2014;44:107–16. 10.1016/j.marpol.2013.08.017Search in Google Scholar
[6] Gill DA, Mascia MB, Ahmadia GN, Glew L, Lester SE, Barnes M, et al. Capacity shortfalls hinder the performance of marine protected areas globally. Nature. 2017;543(7647):665–9. 10.1038/nature21708Search in Google Scholar PubMed
[7] Pynegar EL, Gibbons JM, Asquith NM, Jones JPG. What role should randomized control trials play in providing the evidence base for conservation? Oryx. 2021;55(2):235–44. 10.1017/S0030605319000188Search in Google Scholar
[8] Stuart EA. Matching methods for causal inference: A review and a look forward. Stat Sci Rev J Instit Math Stat. 2010;25(1):1–21. 10.1214/09-STS313Search in Google Scholar PubMed PubMed Central
[9] Cafri G, Wang W, Chan PH, Austin PC. A review and empirical comparison of causal inference methods for clustered observational data with application to the evaluation of the effectiveness of medical devices. Stat Meth Med Res. 2019;28(10-11):3142–62. 10.1177/0962280218799540Search in Google Scholar PubMed
[10] Zubizarreta JR, Keele L. Optimal multilevel matching in clustered observational studies: a case study of the effectiveness of private schools under a large-scale voucher system. J Am Stat Assoc. 2017;212(518):547–60. 10.1080/01621459.2016.1240683Search in Google Scholar
[11] Hong G, Raudenbush SW. Evaluating Kindergarten retention policy: a case study of causal inference for multilevel observational data. J Am Stat Assoc. 2006;101(475):901–10. 10.1198/016214506000000447Search in Google Scholar
[12] Arpino B, Mealli F. The specification of the propensity score in multilevel observational studies. Comput Stat Data Anal. 2011;55(4):1770–80. 10.1016/j.csda.2010.11.008Search in Google Scholar
[13] Yang S. Propensity score weighting for causal inference with clustered data. J Causal Inference. 2018;6(2):20170027. 10.1515/jci-2017-0027Search in Google Scholar
[14] Chang TH, Stuart EA. Propensity score methods for observational studies with clustered data: A review. Stat Med. 2022;41(18):3612–26. 10.1002/sim.9437Search in Google Scholar PubMed PubMed Central
[15] King G, Nielsen R. Why propensity scores should not be used for matching. Politic Anal. 2019;27(4):435–54. 10.1017/pan.2019.11Search in Google Scholar
[16] Abadie A, Imbens GW. Large sample properties of matching estimators for average treatment effects. Econometrica. 2006;74(1):235–67. 10.1111/j.1468-0262.2006.00655.xSearch in Google Scholar
[17] Abadie A, Imbens GW. Bias-corrected matching estimators for average treatment effects. J Business Econ Stat. 2011;29(1):1–11. 10.1198/jbes.2009.07333Search in Google Scholar
[18] Davison AC, Hinkley DV. Bootstrap Methods and their Application. Cambridge Series in Statistical and Probabilistic Mathematics. Cambridge: Cambridge University Press; 1997. Search in Google Scholar
[19] Otsu T, Rai Y. Bootstrap inference of matching estimators for average treatment effects. J Am Stat Assoc. 2017;112(520):1720–32. 10.1080/01621459.2016.1231613Search in Google Scholar
[20] Abadie A, Imbens GW. On the failure of the bootstrap for matching estimators. Econometrica. 2008;76(6):1537–57. 10.3982/ECTA6474Search in Google Scholar
[21] Ahmadia G, Glew L, Provost M, Gill D, Hidayat N, Mangubhai S, et al. Integrating impact evaluation in the design and implementation of monitoring marine protected areas. Phil Trans R Soc B. 2015;370:20140275. 10.1098/rstb.2014.0275Search in Google Scholar PubMed PubMed Central
[22] Brewer TD, Cinner JE, Green A, Pressey RL. Effects of human population density and proximity to markets on coral reef fishes vulnerable to extinction by fishing. Conservat Biol. 2013;27(3):443–52. 10.1111/j.1523-1739.2012.01963.xSearch in Google Scholar PubMed
[23] Edgar GJ, Stuart-Smith RD, Willis TJ, Kininmonth S, Baker S, Barrett N, et al. Global conservation outcomes depend on marine protected areas with five key features. Nature 2014;506:216–220. 10.1038/nature13022Search in Google Scholar PubMed
[24] Campbell SJ, Darling ES, Pardede S, Ahmadia G, Mangubhai S, Amkieltiela, et al. Fishing restrictions and remoteness deliver conservation outcomes for Indonesia’s coral reef fisheries. Conservation Letters. 2020;13(2):e12698. 10.1111/conl.12698Search in Google Scholar
[25] Toth LT, van Woesik R, Murdoch TJT, Smith SR, Ogden J, Precht WF, et al. Do no-take reserves benefit Florida’s corals? 14 years of change and stasis in the Florida Keys National Marine Sanctuary. Coral Reefs. 2014;33:565–77. 10.1007/s00338-014-1158-xSearch in Google Scholar
[26] Karr KA, Fujita R, Halpern BS, Kappel CV, Crowder L, Selkoe KA, et al. Thresholds in Caribbean coral reefs: implications for ecosystem-based fishery management. J Appl Ecol. 2015;52(2):402–12. 10.1111/1365-2664.12388Search in Google Scholar
[27] Rubin DB. Estimating Causal Effects of Treatments in Randomized and Nonrandomized Studies. J Educ Psychol. 1974;66(5):688–701. 10.1037/h0037350Search in Google Scholar
[28] Holland PW. Statistics and causal inference. J Am Stat Assoc. 1986;81(396):945–60. 10.1080/01621459.1986.10478354Search in Google Scholar
[29] Splawa-Neyman J, Dabrowska DM, Speed TP. On the application of probability theory to agricultural experiments. Essay on principles. Section 9. Stat Sci. 1990;5(4):465–72. 10.1214/ss/1177012031Search in Google Scholar
[30] Rosenbaum PR, Rubin DB. The central role of the propensity score in observational studies for causal effects. Biometrika. 1983;70(1):41–55. 10.1093/biomet/70.1.41Search in Google Scholar
[31] Stuart EA. Estimating causal effects using school-level data sets. Educ Res. 2007;36(4):187–98. 10.3102/0013189X07303396Search in Google Scholar
[32] VanderWeele TJ. Ignorability and stability assumptions in neighborhood effects research. Stat Med. 2008;27(11):1934–43. 10.1002/sim.3139Search in Google Scholar PubMed
[33] Li F, Zaslavsky AM, Landrum MB. Propensity score weighting with multilevel data. Stat Med. 2013;101(19):3373–87 10.48550/arXiv.1808.01647.Search in Google Scholar
[34] He Z. Inverse conditional probability weighting with clustered data in causal inference; 2018. Search in Google Scholar
[35] Lee Y, Nguyen TQ, Stuart EA. Partially pooled propensity score models for average treatment effect estimation with multilevel data. J R Stat Soc Ser A (Stat Soc). 2021;184(4):1578–98. 10.1111/rssa.12741Search in Google Scholar
[36] Efron B. Bootstrap methods: another look at the Jackknife. Ann Stat. 1979;7(1):1–26. 10.1214/aos/1176344552Search in Google Scholar
[37] Huber M, Camponovo L, Bodory H, Lechner M. A wild bootstrap algorithm for propensity score matching estimators. Faculty of Economics and Social Sciences, University of Freiburg/Fribourg Switzerland; 2016. p. 470. Search in Google Scholar
[38] Lin Z, Ding P, Han F. Estimation based on nearest neighbor matching: from density ratio to average treatment effect. Econometrica. 2023;91(6):2187–217. 10.3982/ECTA20598Search in Google Scholar
[39] Ding P. A first course in causal inference. New York, NY, USA: CRC Press; 2024. 10.1201/9781003484080Search in Google Scholar
[40] Mammen E. Bootstrap and wild bootstrap for high dimensional linear models. An Stat. 1993;21(1):255–85. 10.1214/aos/1176349025Search in Google Scholar
[41] Cameron AC, Gelbach JB, Miller DL. Bootstrap-based improvements for inference with clustered errors. Rev Econ Stat. 2008;90(3):414–27. 10.1162/rest.90.3.414Search in Google Scholar
[42] Cameron AC, Miller DL. A practitioner’s guide to cluster-robust inference. J Human Resources. 2015;50(2):317–72. 10.3368/jhr.50.2.317Search in Google Scholar
[43] MacKinnon JG, Nielsen MØ, Webb MD. Fast and reliable jackknife and bootstrap methods for cluster-robust inference. J Appl Econ. 2023;38(5):671–94. 10.1002/jae.2969Search in Google Scholar
[44] Schoenberg IJ. Contributions to the problem of approximation of equidistant data by analytic functions: Part A. on the problem of smoothing or graduation. a first class of analytic approximation formulae. Quarter Appl Math. 1946;4(1):45–99. 10.1090/qam/15914Search in Google Scholar
[45] Chen X. Chapter 76 Large sample sieve estimation of semi-nonparametric models. In: Handbook of econometrics. vol. 6. Elsevier; 2007. p. 5549–632. 10.1016/S1573-4412(07)06076-XSearch in Google Scholar
[46] Athey S, Tibshirani J, Wager S. Generalized random forests. Ann Stat. 2019;47(2):1148–78. 10.1214/18-AOS1709Search in Google Scholar
[47] Tibshirani R. Regression shrinkage and selection via the Lasso. J R Stat Soc Ser B (Methodological). 1996;58(1):267–88. 10.1111/j.2517-6161.1996.tb02080.xSearch in Google Scholar
[48] Zhang Y, Yang S, Ye W, Faries DE, Lipkovich I, Kadziola Z. Practical recommendations on double score matching for estimating causal effects. Stat Med. 2022;41(8):1421–45. 10.1002/sim.9289Search in Google Scholar PubMed PubMed Central
[49] Zhao H, Yang S. Outcome-adjusted balance measure for generalized propensity score model selection. J Stat Plan Inference. 2022;221:188–200. 10.1016/j.jspi.2022.04.004Search in Google Scholar
[50] Yang S, Zhang Y. Multiply robust matching estimators of average and quantile treatment effects. Scand J Stat. 2023;50(1):235–65. 10.1111/sjos.12585Search in Google Scholar PubMed PubMed Central
[51] Yang S, Lok JJ. Sensitivity analysis for unmeasured confounding in coarse structural nested mean models. Stat Sin. 2018;28(4):1703–23. 10.5705/ss.202016.0133Search in Google Scholar PubMed PubMed Central
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Decision making, symmetry and structure: Justifying causal interventions
- Targeted maximum likelihood based estimation for longitudinal mediation analysis
- Optimal precision of coarse structural nested mean models to estimate the effect of initiating ART in early and acute HIV infection
- Targeting mediating mechanisms of social disparities with an interventional effects framework, applied to the gender pay gap in Western Germany
- Role of placebo samples in observational studies
- Combining observational and experimental data for causal inference considering data privacy
- Recovery and inference of causal effects with sequential adjustment for confounding and attrition
- Conservative inference for counterfactuals
- Treatment effect estimation with observational network data using machine learning
- Causal structure learning in directed, possibly cyclic, graphical models
- Mediated probabilities of causation
- Beyond conditional averages: Estimating the individual causal effect distribution
- Matching estimators of causal effects in clustered observational studies
- Ancestor regression in structural vector autoregressive models
- Single proxy synthetic control
- Bounds on the fixed effects estimand in the presence of heterogeneous assignment propensities
- Minimax rates and adaptivity in combining experimental and observational data
- Highly adaptive Lasso for estimation of heterogeneous treatment effects and treatment recommendation
- A clarification on the links between potential outcomes and do-interventions
- Valid causal inference with unobserved confounding in high-dimensional settings
- Spillover detection for donor selection in synthetic control models
- Causal additive models with smooth backfitting
- Experiment-selector cross-validated targeted maximum likelihood estimator for hybrid RCT-external data studies
- Applying the Causal Roadmap to longitudinal national registry data in Denmark: A case study of second-line diabetes medication and dementia
- Orthogonal prediction of counterfactual outcomes
- Review Article
- The necessity of construct and external validity for deductive causal inference
Articles in the same Issue
- Research Articles
- Decision making, symmetry and structure: Justifying causal interventions
- Targeted maximum likelihood based estimation for longitudinal mediation analysis
- Optimal precision of coarse structural nested mean models to estimate the effect of initiating ART in early and acute HIV infection
- Targeting mediating mechanisms of social disparities with an interventional effects framework, applied to the gender pay gap in Western Germany
- Role of placebo samples in observational studies
- Combining observational and experimental data for causal inference considering data privacy
- Recovery and inference of causal effects with sequential adjustment for confounding and attrition
- Conservative inference for counterfactuals
- Treatment effect estimation with observational network data using machine learning
- Causal structure learning in directed, possibly cyclic, graphical models
- Mediated probabilities of causation
- Beyond conditional averages: Estimating the individual causal effect distribution
- Matching estimators of causal effects in clustered observational studies
- Ancestor regression in structural vector autoregressive models
- Single proxy synthetic control
- Bounds on the fixed effects estimand in the presence of heterogeneous assignment propensities
- Minimax rates and adaptivity in combining experimental and observational data
- Highly adaptive Lasso for estimation of heterogeneous treatment effects and treatment recommendation
- A clarification on the links between potential outcomes and do-interventions
- Valid causal inference with unobserved confounding in high-dimensional settings
- Spillover detection for donor selection in synthetic control models
- Causal additive models with smooth backfitting
- Experiment-selector cross-validated targeted maximum likelihood estimator for hybrid RCT-external data studies
- Applying the Causal Roadmap to longitudinal national registry data in Denmark: A case study of second-line diabetes medication and dementia
- Orthogonal prediction of counterfactual outcomes
- Review Article
- The necessity of construct and external validity for deductive causal inference