A comprehensive and detailed within-host modeling study involving crucial biomarkers and optimal drug regimen for type I Lepra reaction: A deterministic approach
-
Dinesh Nayak
 ,
Swapna Muthusamy
,
Swapna Muthusamy

Abstract
Leprosy (Hansen’s disease) is an infectious, neglected tropical disease caused by the Mycobacterium Leprae (M. Leprae). About 2,02,189 new cases are diagnosed worldwide each year. Lepra reactions are an off shoot of leprosy infection causing major nerve damage leading to disability. Early detection of lepra reactions through the study of biomarkers can prevent subsequent disabilities. Motivated by these observations, in this study, we have proposed and analyzed a three-dimensional mathematical model to capture the dynamics of susceptible schwann cells, infected schwann cells, and the bacterial load based on the pathogenesis of leprosy. We did the stability analysis, numerical simulations, and also performed the sensitivity analysis using Spearman’s rank correlation coefficient, partial rank correlation coefficient, and Sobol’s index methods. We later performed the optimal control studies with both multi-drug therapy and steroid interventions as control variables. Finally, we did the comparative and effectiveness study of these different control interventions.
1 Introduction
Leprosy is an infection caused by slow-growing bacteria called Mycobacterium leprae. Leprosy is also known as Hansen disease, and it is considered to be the oldest disease known to humans. Primarily the bacteria affects the skin and peripheral nerves of the host body. In some of the cases, it affects the mucosa of the upper respiratory tract and the eyes. According to the WHO report [25], the global annual number of new cases detected in 2019 was about 2,02,189. In 2017, more than half million people were disabled due to leprosy, and almost 50,000 are added every year worldwide. Specifically in the Indian scenario as on March 2021, 79,898 patients were under free multi drug therapy (MDT) treatment for leprosy in which 65,147 were new cases [39]. In leprosy, lepra reactions are the major cause for nerve damage leading to disability. Early detection of lepra reactions through the study of biomarkers have important role in prevention of subsequent disabilities.
During the course of the leprosy disease, there can be sudden changes in immune-mediated response to Mycobacterium leprae antigen, which are referred to as leprosy (lepra) reactions. The reactions manifest as acute inflammatory episodes rather than chronic infectious course. There are mainly two types of leprosy reactions. Type 1 reaction is associated with cellular immunity and particularly with the reaction of T helper 1 (Th1) cells to mycobacterial antigens. This reaction involves exacerbation of old lesions leading to the erythematous appearance. Type 2 reaction or erythema nodosum leprosum is associated with humoral immunity. It is characterized by systemic symptoms along with new erythematous subcutaneous nodules.
Several clinical and experimental studies have been done on leprosy. Some works deal about the growth of the M. Leprae [23], and some studies on pathogenesis [21]. Some mathematical modeling studies dealing with infectious disease can be found in [1,31,34,36]. Specifically in the context of the leprosy modeling, the work [5] explores the dynamics of transmission of leprosy at population level, and in [12], the transmission dynamics of the multibacillary leprosy, and paucibacillary leprosy including a delay is dealt with. In [11], the cellular level dynamics of leprosy are explored. To our knowledge as of date, there is no work done yet to explore the dynamics at the level of biomarkers for leprosy, and also there seems to be no mathematical literature available dealing with the optimal drug regimen for treating leprosy and lepra reactions. A mathematical modeling study to this extent will help the clinicians to dissemination of the leprosy by targeting the crucial biomarkers with minimal damage and also helps them for the optimal drug regimen.
Motivated by the aforementioned observations, in this study, we have proposed and analyzed an within-host three-dimensional mathematical model to capture the dynamics of susceptible schwann cells, infected schwann cells, and the bacterial load involving the causation biomarkers for type I lepra reaction based on a detailed flowchart dealing with the pathogenesis of leprosy developed from the clinical works [28,30,38] and depicted in Figure 1. We initially study the natural history of the disease followed by studies on the optimal drug regimen for type I lepra reaction.

Frame (a) depicts the flow chart of the Pathogenesis of leprosy in side human body in brief. Frame (b) depicts the flow chart of the Pathogenesis of leprosy in side human body in detail.
This article is organized as follows. In Section 2, we formulate the mathematical model dealing with the type I lepra reaction based on its pathogenesis. In Section 3, we establish the existence, positivity, and boundedness of the developed model followed by the local and global stability of different equilibria about the reproduction number value
2 Mathematical model formulation
On the basis of the pathogenesis of leprosy dealt in the flowchart in Figure 1, we consider a three-compartment model dealing with susceptible schwann cells
The dynamics of the susceptible cells, i.e.,
| Symbols | Biological meaning |
|---|---|
|
|
Susceptible schwann cells |
|
|
Infected schwann cells |
|
|
Bacterial load |
|
|
Natural birth rate of the susceptible cells |
|
|
Rate at which schwann cells are infected |
|
|
Death rate of the susceptible cells due to cytokines |
|
|
Natural death rate of schwann cells and infected schwann cells |
|
|
Death rate of infected schwann cells due to cytokines |
|
|
Burst rate of infected schwann cells realizing the bacteria |
|
|
Rates at which M. Leprae is removed because of the release of cytokines IL-2, IL-7,
|
|
|
Natural death rate of M. Leprae |
3 Stability analysis
3.1 Positivity and boundedness
Theorem 1
(Positivity) For the model (1)–(3) if initially
Proof
We now aim to show that for all
Consider
On solving the aforementioned inequality, we obtain
In similar lines, we see that
Here, we let
Theorem 2
(Boundedness) There exists an upper bound for each of the variable
Proof
Let us consider
Considering
Hence,
Now for
We now consider
Solving the aforementioned differential equation for
Hence, there exists an upper bound for
Hence,
3.2 Existence of the solution
Theorem 3
Let
Proof
The system (1)–(3) in the vectorial form are given by
where
Now we can see that
3.3 Equilibrium points and the reproduction number
ℛ
0
The basic reproduction number for the system (1)–(3) is calculated using the next-generation matrix method [13], and the expression for
We also see that the system (1)–(3) admits two equilibria, namely, the infection/disease free equilibrium
3.4 Stability analysis of
E
0
3.4.1 Local stability
In the following, we do the local stability analysis of the infection free equilibrium
The Jacobian matrix of the system at the infection free equilibrium
The characteristic equation is given by
One of the eigenvalues of the aforementioned equation is
Introducing
Letting
We now consider the following two cases for understanding the stability of infection free equilibrium.
Case I: When
Further, in this case, we need to consider the following two sub cases:
Subcase (a): When
This means
which are less than zero.
Therefore, the infection free equilibrium point
Subcase (b): When
Hence, we conclude that
Case II: When
In this case the characteristic equation has two negative eigenvalues and one positive eigenvalue. Hence, whenever
3.4.2 Global stability
As in Korobeinikov [16], we consider the Lyapunov function of the system (1)–(3) as follows:
Now
Here,
3.5 Stability analysis of
E
∗
3.5.1 Local stability
The Jacobian matrix of the system for
The characteristic equation of the Jacobian
where
Since
3.5.2 Global stability
Consider the Lyapunov function of the system (1)–(3) for
We see that
Now since arithmetic mean is greater than or equal to the geometric mean, the quantities
Therefore, the derivative
3.6 Bifurcation analysis
We now use the method given by Buonomo in [7] to do the bifurcation analysis for the system (1)–(3).
Proof
Let us consider
Now we consider
and also
Further, we can interpret each
where
Denoting
Now we will satisfy the conditions A1–A5 of [7] as follows:
A1: All
A2: If
A3: No incidence of infection in uninfected compartment(
A4: Disease free subspace is invariant, that means for
A5: Now putting all
Now the derivative matrix of
where
We now show that the following hypothesis H1–H3 of [7] is also satisfied.
H1: The only nonlinear term present in infected compartment of the system is
H2: Let
H3: There is no transfer from infected compartment to uninfected compartment.
Now by using Proposition 1 in [7], we can conclude that the system (1)–(3) undergoes a trans-critical bifurcation at
4 Numerical simulations
All the values of the parameters used here are estimated from different clinical papers. The appropriate references are cited in the Table 1. For the parameters
Values of the parameters complied from clinical literature
| Symbols | Values | Units |
|---|---|---|
|
|
0.022 [15] |
|
|
|
3.44 [14] |
|
|
|
0.1795 [24] |
|
|
|
0.0018 [24] |
|
|
|
0.2681 [24] |
|
|
|
0.063 [18] |
|
|
|
0.0003 [11] |
|
|
|
0.57 [3] |
|
4.1 Disease free equilibrium
E
0
We now depict the local and global stability of the disease-free equilibrium

We choose parameters in Table 2 and in such a way that
Values of the parameters taken for
|
|
|
|
|
|
|
|
|
|---|---|---|---|---|---|---|---|
| 1.090 | 0.44 | 0.01795 | 0.0018 | 0.2681 | 0.0063 | 0.0003 | 0.57 |
4.2 Infected/endemic equilibrium
E
∗
We now depict the local and global stability of the endemic equilibrium

For the numerical simulations, we have chosen the values of parameters as given in Table 3. For these parameter values, we have
Values of the parameters taken for
|
|
|
|
|
|
|
|
|
|---|---|---|---|---|---|---|---|
| 20.90 | 0.030 | 0.01795 | 0.00018 | 0.2681 | 00.2 | 0.3 | 0.57 |
4.3 Transcritical bifurcation
In this bifurcation, there is an exchange of stability between

5 Model validation through 2D heat plots
From some of the clinical studies, we see that the average doubling time of the M. Leprae is approximately 14 days [27]. On the basis of this characteristic, we now validate the model (1)–(3) through the 2D heat plot.
We now vary the parameters
Now from Figure 5, it can be seen that the proposed model is able to reproduce characteristic, i.e., exactly the double of initial count of bacterial load, that is, 80 (
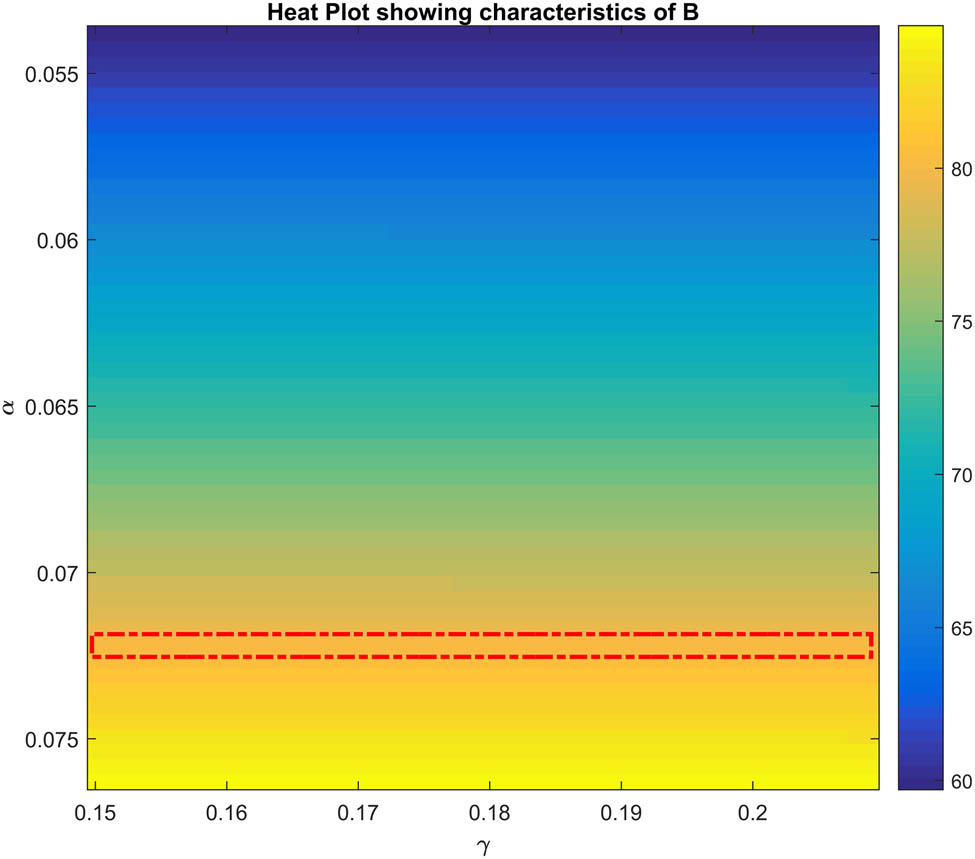
Heat plot illustrating that the proposed model reproduces the clinical characteristics of leprosy. This can be seen from the red rectangular box, which the depicts the doubling value of the bacterial load (80) on the 14th day.
6 Sensitivity analysis
Here, we are interested in investigating the impact of uncertainty in the values of the different parameters on the variables (
6.1 LHS and Scatter plots
As an initial step to LHS, we select the following parameters listed in Table 4 having possible uncertainty in their values and consider them for the process of sampling. The range of the variable values used for sampling is listed in Table 4. All the parameter value ranges are chosen based on the clinical papers [18,24], and we introduced an uncertainty in
Range of sensitive parameters
| Parameter | Max value | Min value |
|---|---|---|
|
|
0.0763 | 0.0538 |
|
|
0.0405 | 0.0305 |
|
|
0.3099 | 0.2263 |
|
|
0.0763 | 0.0538 |
|
|
0.0001 | 0.0005 |
Then the LHS is done to create 1,000 sets of parameter sample each containing 5 random values of parameters. Now each set of these parameters was used to simulate the model at each time. Scatter plots were created for each parameter vs variable to decide the further procedure of GSA.
In Figure 6, we can easily see that the relationships between

Scatter plots for parameters vs variables such as
6.2 SRCC and PRCC
By using the same sample obtained earlier, we calculated SRCC index separately for
Figure 7 shows that

SRCC with respect to time, where

PRCC with respect to time. The combined impact of
6.3 Sobol’s index
The Sobol’s index is calculated using the formula of correlation [29].
where
The Sobol’s index was calculated for the parameters

Sobol’s index of
Because of the aforementioned limitation, we tried to identify the sensitive parameters with respect to
6.4 Sensitivity of
ℛ
0
For identifying the sensitive parameters with respect to

Frame (a) depicts sensitivity through Sobol’s Index with respect to
6.5 Inference
From the aforementioned sensitivity analysis, we can conclude that
7 Optimal control studies
Currently, for type I lepra reaction, two kinds of medication are prescribed based on the disease condition [22,37]. First, MDT is used, and if still the reaction burden does not reduce, then steroids are given along with the MDT treatment.
Motivated by the aforementioned clinical findings, in this section, we frame and study two optimal control problems. First one deals with the optimal drug regimen for MDT and the second deals with the optimal drug regimen for the scenario involving both MDT and steroid interventions. These medical/drug interventions are modeled as control variables for the system (1)–(3).
7.1 Optimal control problem associated with MDT
According to the WHO recommended guidelines of 2018 for leprosy MDT consist of three drugs rifampin, dapsone, and clofazimine [22,35]. The drug rifampin acts as a rapid bacillary killer and thereby indirectly reduces the amount of cells getting infected. Therefore, the control variable
Now mathematically we define the set of all control variables as follows:
Here,
Since the drugs in MDT can lead to some hazards, we consider a cost functional that minimizes the drug concentrations along with the infected cell count and bacterial load. On this basis, we define the following cost functional:
subject to the constraints/system
Here,
The integrand of the cost function (6), denoted by
is the Lagrangian or running cost of the optimal control problem.
The admissible set of solutions for the aforementioned optimal control problem (6)–(9) is given by
7.2 Existence of optimal solution
In the section, we establish the existence of optimal control for the system (6)–(9) using the existence Theorem 2.2 of [6] dealing with nonlinear control systems.
Theorem 5
There exists a 8-tuple of optimal controls
corresponding to the control system (6)–(9), where
Proof
Let us consider that
is a continuous function of
F1: Here, each
F2: We consider
Here,
Similarly for
Now for
F3: Since
Now we have to show that the running cost function
satisfies the conditions
Here we see that
Since
Consider
Since
By using similar type of argument, we can easily show that for each fixed
7.3 Characteristics for the optimal control
In this section, we obtain the characteristics of the optimal control using the Pontryagin’s maximum principle [19].
The Hamiltonian for the system (6)–(9) is given by
where
Now by substituting the value of the Hamiltonian into the aforementioned equation, we obtain
along with the transversality condition
7.4 Numerical studies for the optimal control problem with MDT
In this section, we numerically obtain the optimal drug regimen for the control problem (6)–(9) using the optimal controls obtained in the earlier section.
For the numerical simulations, we consider a time period of 100 days (
Further to simulate the system with controls, we use the forward–backward sweep method starting with the initial value of the controls as zero and estimate the sate variables forward in time. Since the transversality conditions have the value of adjoint vector at end time
By using the value of state variables and adjoint vector, we calculate the control variables at each time instance that get updated in each iteration. We continue this till the convergence criterion is met [17].
The weights
Hazard ratio of the drugs
| Drugs | Hazard ratio | Source |
|---|---|---|
| Rifampin | 0.26 | [4] |
| Dapsone | 0.99 | [8] |
| Clofazimine | 1.85 | [8] |
We now numerically simulate the
Figure 11 illustrates that when individually drugs are administered, the susceptible cell count decrease and the opposite effect is seen for infected cells and bacterial load compartments. From this figures we observe that the drug rifampin works the best in reducing the infected cells.

The dynamics of the
Figure 12 depicts the combination of two-drug intervention case. As earlier, here also, we see the susceptible cell count increase with two-drug combination, and there is a decrease in both the infected cells and bacterial load compartments. From this figure, we observe that the drug combination of rifampin and dapsone works the best in reducing the infected cells and bacterial load.

The dynamics of the
Figure 13 shows the dynamics of the

The dynamics of the
Table 6 gives the average
Average count of the
| Drug combination | Avg susceptible cells | Avg infected cells | Avg bacterial load |
|---|---|---|---|
| Without drug | 442.222583 | 351.081674 | 246.624000 |
| Rifampin | 455.500908 | 304.740187 | 168.887009 |
| Dapsone | 460.282734 | 311.553091 | 156.588949 |
| Clofazimine | 444.432478 | 350.135857 | 241.111031 |
| Rifampin and dapsone | 457.141441 | 286.714732 | 153.050429 |
| Rifampin and clofazimine | 454.385431 | 316.254129 | 181.777783 |
| Dapsone and clofazimine | 449.424133 | 307.980694 | 181.694639 |
| MDT | 457.899776 | 286.431294 | 150.360779 |
7.5 Optimal control problem associated with MDT along with steroids
Corticosteroid is a steroid that is mainly used for protecting the nerve damage by suppressing the cytokines responses caused due to the presence of M. leprae [32]. Also corticosteroid is usually given after the administration of MDT drugs owing to lepra reactions caused as a consequence of leprosy infection [32]. To capture this aspect and delay in administration of steroids, we introduce a time delay
With the aforementioned modifications, the set of controls now is given by
and the modified objective function and the control system are given by
Here, the Lagrangian is the integrand of the cost function (14) and is given by
The admissible set of solutions for the aforementioned optimal control problem will now lie in the set
The existence of the optimal control can be shown in the similar way as it was shown in the previous optimal control problem in the preceding section.
We see that the Hamiltonian for the system (14)–(17) is given by
where
Now by substituting the value of the Hamiltonian in the aforementioned equation, we obtain
along with the transversality condition
We now have
Now differentiating the Hamiltonian and solving it for
7.5.1 Numerical simulations for optimal control with both MDT and steroids
Here, we use all the parameter values and initial conditions same as in the previous optimal control problem. The value of the weight
From Figure 14, it can be seen that the combined combination of MDT and corticosteroid seems to be doing the best job in decreasing the lepra type 1 reaction disease burden.

The system dynamics when MDT and steroids are intervened.
8 Comparative and effectiveness study
In this section, we will perform the comparative and effectiveness study for the system (7)–(9).
For this system, without any control/drug interventions, the basic reproduction number is given by
Now to study the effectiveness of each of these control/drug interventions, we calculate the modified reproduction number
The drug dapsone primarily acts on the inhibition of viral replication. On this basis, we consider
Since the drug rifampin is a killer of bacteria, it indirectly reduces the interaction between susceptible cells and the bacteria. Owing to this, we choose
The drug clofazimine primarily inhibits the cytokines responses indirectly reducing the death of healthy cells. Owing to this, we consider
We now do the comparative and effectiveness study by calculating the percentage of reduction
We performed this study for different efficacy levels of the drugs such as: (a) low efficacy (LE) given by 0.3, (b) medium efficacy (ME) given by 0.6, and (c) high efficacy (HE) given by 0.9.
In the following table, the comparative and effectiveness study is done, and the drug combinations are ranked based on the reduction in percentage of
From Table 7 dealing with the comparative and effectiveness study, it can be seen that MDT treatment seems to be working the best in reducing the
Comparative and effectiveness study in terms of ranking for different combinations of drug interventions for LE, ME, and HE
| Sl No. | Drug combination | % age LE | Rank | % age ME | Rank | % age HE | Rank |
|---|---|---|---|---|---|---|---|
| 1 | Rifampin | 30.000000 | 4 | 60.000000 | 4 | 90.000000 | 4 |
| 2 | Dapsone | 7.880000 | 2 | 15.750000 | 2 | 23.630000 | 2 |
| 3 | Clofazimine | 0.043724 | 1 | 0.091317 | 1 | 0.143575 | 1 |
| 4 | Rifampin and dapsone | 35.516000 | 6 | 66.300000 | 6 | 92.363000 | 6 |
| 5 | Rifampin and clofazimine | 30.030607 | 5 | 60.036527 | 5 | 90.014357 | 5 |
| 6 | Dapsone and clofazimine | 7.920279 | 3 | 15.826935 | 3 | 23.739648 | 3 |
| 7 | MDT | 35.544195 | 7 | 66.330774 | 7 | 92.373965 | 7 |
9 Discussion and conclusions
On the basis of the pathogenesis of leprosy in this work, we have initially formulated a deterministic model dealing with the type I lepra reaction and the causation biomarkers. We have studied the natural history of this model. As part of this study, we did the stability analysis and sensitivity analysis. The framed model was also validated using the 2D heat plot based on the characteristic of average doubling time of the M. Leprae.
Later on, we framed and studied two optimal control problems. The first problem dealt with the MDT interventions and second dealt with MDT along with steroid interventions. Finally, we did the comparative and effectiveness study for the different interventions.
The findings from these studies include the following.
The proposed model admits two steady dynamic states one being disease-free equilibrium and the other being the infected equilibrium. For
From the first optimal control study dealing with the MDT interventions, it was seen that for individual drug intervention scenario, the drug rifampin has the highest impact in reducing both the infected cells and the bacterial load. For the two-drug combination scenario, rifampin along dapsone combination was the best in reducing the disease burden. Further, it was found that the MDT combination drug intervention was the best in reducing the disease burden in comparison with single- and two-drug combinations. The second optimal control problem dealing with MDT interventions along with steroid intervention also led to the conclusion that the optimal intervention is the combined intervention of administering MDT along with steroid intervention.
The findings from the comparative and effectiveness study show that the drug clofazimine has the least impact in reducing the disease burden when applied individually, and the drug rifampin has the highest impact. Overall MDT intervention does the best job in reducing the disease burden. The findings from the comparative and effectiveness study are in line with the observations of the optimal control studies.
This detailed and exhaustive within-host modeling study of type I lepra reaction involving the crucial biomarkers is a first of its kind. The finding from this novel and comprehensive study will help the clinicians and public health researchers in early detection of lepra reactions through the study of biomarkers for prevention of subsequent disabilities.
Acknowledgments
The authors dedicate this article to the founder chancellor of SSSIHL, Bhagawan Sri Sathya Sai Baba. The corresponding author also dedicates this article to his loving elder brother D. A. C. Prakash who still lives in his heart. The first author acknowledges the support of Dr. Parthasarathi Palai for this work.
-
Funding information: This research was supported by Council of Scientific and Industrial Research (CSIR) under project grant – Role and Interactions of Biological Markers in Causation of Type 1/Type 2 Lepra Reactions: A In Vivo Mathematical Modelling with Clinical Validation (Sanction Letter No. 25(0317)/20/EMR-II).
-
Conflict of interest: The authors declare no conflict of interest for this research work.
-
Ethical approval: This research did not require any ethical approval.
References
[1] Agarwal, P., & Singh, R. (2020). Modelling of transmission dynamics of nipah virus (niv): A fractional order approach. Physica A: Statistical Mechanics and its Applications, 547, 124–243. 10.1016/j.physa.2020.124243Suche in Google Scholar
[2] Agarwal, R. P., & O’Regan, D. (2008). Existence and uniqueness of solutions of systems. New York City: Springer. Suche in Google Scholar
[3] International Leprosy Association, et al. (2020). International Journal of Leprosy and Other Mycobacterial Diseases. Suche in Google Scholar
[4] Bakker, M. I., Hatta, M., Kwenang, A., Van Benthem, B. H., Van Beers, S. M., Klatser, P. R., & Oskam, L. (2005). Prevention of leprosy using rifampicin as chemoprophylaxis. The American Journal of Tropical Medicine and Hygiene, 72(4), 443–448. 10.4269/ajtmh.2005.72.443Suche in Google Scholar
[5] Blok, D. J., de Vlas, S. J., Fischer, E. A., & Richardus, J. H. (2015). Mathematical modelling of leprosy and its control. Advances in Parasitology, 87, 33–51. 10.1016/bs.apar.2014.12.002Suche in Google Scholar PubMed
[6] Boyarsky, A. (1976). On the existence of optimal controls for nonlinear systems. Journal of Optimization Theory and Applications, 20(2), 205–213. 10.1007/BF01767452Suche in Google Scholar
[7] Buonomo, B. (2015). A note on the direction of the transcritical bifurcation in epidemic models. Nonlinear Analysis: Modelling and Control, 20(1), 38–55. 10.15388/NA.2015.1.3Suche in Google Scholar
[8] Cerqueira, S. R. P. S., Deps, P. D., Cunha, D. V., Bezerra, N. V. F., Barroso, D. H., Pinheiro, A. B. S., …, Gomes, C. M. (2021). The influence of leprosy-related clinical and epidemiological variables in the occurrence and severity of covid-19: A prospective real-world cohort study. PLoS Neglected Tropical Diseases, 15(7), e0009635. 10.1371/journal.pntd.0009635Suche in Google Scholar PubMed PubMed Central
[9] Cho, K.-H., Shin, S.-Y., Kolch, W., & Wolkenhauer, O. (2003). Experimental design in systems biology, based on parameter sensitivity analysis using a monte carlo method: A case study for the tnfα-mediated nf-κb signal transduction pathway. Simulation, 79(12), 726–739. 10.1177/0037549703040943Suche in Google Scholar
[10] Garrelts, J. C. (1991). Clofazimine: A review of its use in leprosy and mycobacterium avium complex infection. Dicp, 25(5), 525–531. 10.1177/106002809102500513Suche in Google Scholar PubMed
[11] Ghosh, S., Chatterjee, A., Roy, P., Grigorenko, N., Khailov, E., & Grigorieva, E. (2021). Mathematical modeling and control of the cell dynamics in leprosy. Computational Mathematics and Modeling, 33, 1–23. 10.1007/s10598-021-09516-zSuche in Google Scholar
[12] Giraldo, L., Garcia, U., Raigosa, O., Munoz, L., Dalia, M. M. P., & Jamboos, T. (2018). Multibacillary and paucibacillary leprosy dynamics: A simulation model including a delay. Appl Math Sci, 12(32), 1677–1685. 10.12988/ams.2018.88121Suche in Google Scholar
[13] Heffernan, J. M., Smith, R. J., & Wahl, L. M. (2005). Perspectives on the basic reproductive ratio. Journal of the Royal Society Interface, 2(4), 281–293. 10.1098/rsif.2005.0042Suche in Google Scholar PubMed PubMed Central
[14] Jin, S.-H., An, S.-K., & Lee, S.-B. (2017). The formation of lipid droplets favors intracellular mycobacterium leprae survival in sw-10, non-myelinating schwann cells. PLoS Neglected Tropical Diseases, 11(6), e0005687. 10.1371/journal.pntd.0005687Suche in Google Scholar PubMed PubMed Central
[15] Kim, H.-S., Lee, J., Lee, D. Y., Kim, Y.-D., Kim, J. Y., Lim, H. J., …, Cho, Y. S. (2017). Schwann cell precursors from human pluripotent stem cells as a potential therapeutic target for myelin repair. Stem Cell Reports, 8(6), 1714–1726. 10.1016/j.stemcr.2017.04.011Suche in Google Scholar PubMed PubMed Central
[16] Korobeinikov, A. (2004). Global properties of basic virus dynamics models. Bulletin of Mathematical Biology, 66(4), 879–883. 10.1016/j.bulm.2004.02.001Suche in Google Scholar PubMed
[17] Lenhart, S., & Workman, J. T. (2007). Optimal control applied to biological models. USA: Chapman and Hall/CRC. 10.1201/9781420011418Suche in Google Scholar
[18] Levy, L., & Baohong, J. (2006). The mouse foot-pad technique for cultivation of mycobacterium leprae. Leprosy Review, 77(1), 5–24. 10.47276/lr.77.1.5Suche in Google Scholar
[19] Liberzon, D. (2011). Calculus of variations and optimal control theory: A concise introduction. New Jersey: Princeton University Press. 10.2307/j.ctvcm4g0sSuche in Google Scholar
[20] Marino, S., Hogue, I. B., Ray, C. J., & Kirschner, D. E. (2008). A methodology for performing global uncertainty and sensitivity analysis in systems biology. Journal of Theoretical Biology, 254(1), 178–196. 10.1016/j.jtbi.2008.04.011Suche in Google Scholar PubMed PubMed Central
[21] Massone, C., & Nunzi, E. (2022). Pathogenesis of leprosy. In Leprosy and Buruli Ulcer (pp. 45–48), Germany: Springer. 10.1007/978-3-030-89704-8_5Suche in Google Scholar
[22] Maymone, M. B., Venkatesh, S., Laughter, M., Abdat, R., Hugh, J., Dacso, M. M., …, Dellavalle, R. P. (2020). Leprosy: Treatment and management of complications. Journal of the American Academy of Dermatology, 83(1), 17–30. 10.1016/j.jaad.2019.10.138Suche in Google Scholar PubMed
[23] Ojo, O., Williams, D. L., Adams, L. B., & Lahiri, R. (2022). Mycobacterium leprae transcriptome during in vivo growth and ex vivo stationary phases. Frontiers in Cellular and Infection Microbiology, 11, 1410. 10.3389/fcimb.2021.817221Suche in Google Scholar PubMed PubMed Central
[24] Oliveira, R. B., Sampaio, E. P., Aarestrup, F., Teles, R. M., Silva, T. P., Oliveira, A. L., …, Sarno, E. N. (2005). Cytokines and mycobacterium leprae induce apoptosis in human Schwann cells. Journal of Neuropathology & Experimental Neurology, 64(10), 882–890. 10.1097/01.jnen.0000182982.09978.66Suche in Google Scholar PubMed
[25] World Health Organization. (2020). Global consultation of national leprosy programme managers, partners and affected persons on global leprosy strategy 2021–2030: Report of the virtual meeting 26–30 October 2020. Suche in Google Scholar
[26] Paniker, U., & Levine, N. (2001). Dapsone and sulfapyridine. Dermatologic Clinics, 19(1), 79–86. 10.1016/S0733-8635(05)70231-XSuche in Google Scholar PubMed
[27] Pinheiro, R. O., de Souza Salles, J., Sarno, E. N., & Sampaio, E. P. (2011). Mycobacterium leprae-host-cell interactions and genetic determinants in leprosy: An overview. Future Microbiology, 6(2), 217–230. 10.2217/fmb.10.173Suche in Google Scholar PubMed PubMed Central
[28] Ridley, D. S. (2013). Pathogenesis of leprosy and related diseases. Amsterdam, Netherlands: Elsevier. Suche in Google Scholar
[29] Saltelli, A., Ratto, M., Andres, T., Campolongo, F., Cariboni, J., Gatelli, D., …, Tarantola, S. (2008). Global sensitivity analysis: The primer. Hoboken, New Jersey, U.S.: John Wiley & Sons. 10.1002/9780470725184Suche in Google Scholar
[30] Sasaki, S., Takeshita, F., Okuda, K., & Ishii, N. (2001). Mycobacterium leprae and leprosy: A compendium. Microbiology and Immunology, 45(11), 729–736. 10.1111/j.1348-0421.2001.tb01308.xSuche in Google Scholar PubMed
[31] Sharma, N., Singh, R., Singh, J., & Castillo, O. (2021). Modeling assumptions, optimal control strategies and mitigation through vaccination to zika virus. Chaos, Solitons & Fractals, 150, 111–137. 10.1016/j.chaos.2021.111137Suche in Google Scholar
[32] Shetty, V. P., Khambati, F. A., Ghate, S. D., Capadia, G. D., Pai, V. V., & Ganapati, R. (2010). The effect of corticosteroids usage on bacterial killing, clearance and nerve damage in leprosy; part 3-study of two comparable groups of 100 multibacillary (mb) patients each, treated with mdt. steroids vs mdt alone, assessed at 6 months post-release from 12 months mdt. Leprosy Review, 81(1), 41–58. 10.47276/lr.81.1.41Suche in Google Scholar
[33] Sibuya, Y., Hsieh, P.-F., & Sibuya, Y. (1999). Basic theory of ordinary differential equations. Germany: Springer Science & Business Media. Suche in Google Scholar
[34] Singh, R., Sharma, N., & Ghosh, A. (2019). Modeling assumptions, mathematical analysis and mitigation through intervention. Letters in Biomathematics, 6(2), 1–19. Suche in Google Scholar
[35] Tripathi, K. (2013). Essentials of medical pharmacology. India: JP Medical Ltd. 10.5005/jp/books/12256Suche in Google Scholar
[36] RRRehman, A., Singh, R., & Singh, J. (2022). Mathematical analysis of multi-compartmental malaria transmission model with reinfection. Chaos, Solitons & Fractals, 163, 112–527. 10.1016/j.chaos.2022.112527Suche in Google Scholar
[37] Walker, S. L., & Lockwood, D. N. (2008). Leprosy type 1 (reversal) reactions and their management. Leprosy Review, 79(4), 372–386. 10.47276/lr.79.4.372Suche in Google Scholar
[38] Weddell, G., & Palmer, E. (1963). The pathogenesis of leprosy. Leprosy Review, 34, 57. 10.5935/0305-7518.19630010Suche in Google Scholar PubMed
[39] World Health Organization. (2022). Supporting Leprosy Elimination in India. Suche in Google Scholar
[40] Zhang, X.-Y., Trame, M. N., Lesko, L. J., & Schmidt, S. (2015). Sobol sensitivity analysis: A tool to guide the development and evaluation of systems pharmacology models. CPT: Pharmacometrics & Systems Pharmacology, 4(2), 69–79. 10.1002/psp4.6Suche in Google Scholar PubMed PubMed Central
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Special Issue: Infectious Disease Modeling In the Era of Post COVID-19
- A comprehensive and detailed within-host modeling study involving crucial biomarkers and optimal drug regimen for type I Lepra reaction: A deterministic approach
- Application of dynamic mode decomposition and compatible window-wise dynamic mode decomposition in deciphering COVID-19 dynamics of India
- Role of ecotourism in conserving forest biomass: A mathematical model
- Impact of cross border reverse migration in Delhi–UP region of India during COVID-19 lockdown
- Cost-effective optimal control analysis of a COVID-19 transmission model incorporating community awareness and waning immunity
- Evaluating early pandemic response through length-of-stay analysis of case logs and epidemiological modeling: A case study of Singapore in early 2020
- Special Issue: Application of differential equations to the biological systems
- An eco-epidemiological model with predator switching behavior
- A numerical method for MHD Stokes model with applications in blood flow
- Dynamics of an eco-epidemic model with Allee effect in prey and disease in predator
- Optimal lock-down intensity: A stochastic pandemic control approach of path integral
- Bifurcation analysis of HIV infection model with cell-to-cell transmission and non-cytolytic cure
- Special Issue: Differential Equations and Control Problems - Part I
- Study of nanolayer on red blood cells as drug carrier in an artery with stenosis
- Influence of incubation delays on COVID-19 transmission in diabetic and non-diabetic populations – an endemic prevalence case
- Complex dynamics of a four-species food-web model: An analysis through Beddington-DeAngelis functional response in the presence of additional food
- A study of qualitative correlations between crucial bio-markers and the optimal drug regimen of Type I lepra reaction: A deterministic approach
- Regular Articles
- Stochastic optimal and time-optimal control studies for additional food provided prey–predator systems involving Holling type III functional response
- Stability analysis of an SIR model with alert class modified saturated incidence rate and Holling functional type-II treatment
- An SEIR model with modified saturated incidence rate and Holling type II treatment function
- Dynamic analysis of delayed vaccination process along with impact of retrial queues
- A mathematical model to study the spread of COVID-19 and its control in India
- Within-host models of dengue virus transmission with immune response
- A mathematical analysis of the impact of maternally derived immunity and double-dose vaccination on the spread and control of measles
- Influence of distinct social contexts of long-term care facilities on the dynamics of spread of COVID-19 under predefine epidemiological scenarios
Artikel in diesem Heft
- Special Issue: Infectious Disease Modeling In the Era of Post COVID-19
- A comprehensive and detailed within-host modeling study involving crucial biomarkers and optimal drug regimen for type I Lepra reaction: A deterministic approach
- Application of dynamic mode decomposition and compatible window-wise dynamic mode decomposition in deciphering COVID-19 dynamics of India
- Role of ecotourism in conserving forest biomass: A mathematical model
- Impact of cross border reverse migration in Delhi–UP region of India during COVID-19 lockdown
- Cost-effective optimal control analysis of a COVID-19 transmission model incorporating community awareness and waning immunity
- Evaluating early pandemic response through length-of-stay analysis of case logs and epidemiological modeling: A case study of Singapore in early 2020
- Special Issue: Application of differential equations to the biological systems
- An eco-epidemiological model with predator switching behavior
- A numerical method for MHD Stokes model with applications in blood flow
- Dynamics of an eco-epidemic model with Allee effect in prey and disease in predator
- Optimal lock-down intensity: A stochastic pandemic control approach of path integral
- Bifurcation analysis of HIV infection model with cell-to-cell transmission and non-cytolytic cure
- Special Issue: Differential Equations and Control Problems - Part I
- Study of nanolayer on red blood cells as drug carrier in an artery with stenosis
- Influence of incubation delays on COVID-19 transmission in diabetic and non-diabetic populations – an endemic prevalence case
- Complex dynamics of a four-species food-web model: An analysis through Beddington-DeAngelis functional response in the presence of additional food
- A study of qualitative correlations between crucial bio-markers and the optimal drug regimen of Type I lepra reaction: A deterministic approach
- Regular Articles
- Stochastic optimal and time-optimal control studies for additional food provided prey–predator systems involving Holling type III functional response
- Stability analysis of an SIR model with alert class modified saturated incidence rate and Holling functional type-II treatment
- An SEIR model with modified saturated incidence rate and Holling type II treatment function
- Dynamic analysis of delayed vaccination process along with impact of retrial queues
- A mathematical model to study the spread of COVID-19 and its control in India
- Within-host models of dengue virus transmission with immune response
- A mathematical analysis of the impact of maternally derived immunity and double-dose vaccination on the spread and control of measles
- Influence of distinct social contexts of long-term care facilities on the dynamics of spread of COVID-19 under predefine epidemiological scenarios