On some dense sets in the space of dynamical systems
-
Ryszard J. Pawlak
 and
Justyna Poprawa
and
Justyna Poprawa

Abstract
The natural consequence of the existence of different kinds of chaos is the study of their mutual dependence and the relationship between these concepts and the entropy of systems. This observation also applies to the local approach to this issue. In this article, we will focus on this problem in the context of “points focusing chaos.” We aim to show their mutual independence by considering the sets of appropriate periodic dynamical systems in the space of discrete dynamical systems.
1 Introduction
The notion of chaos first appeared in 1975 in [8]. Since then, many different and non-equivalent definitions of chaos have been formulated. The survey of these concepts and an indication of their mutual dependence one can find, for example, in [9,13]. It is worth noting that some research also refers to the local properties of the dynamical system. For example, proposals for points of chaos (points around which the chaos focuses, e.g., [2,10,11]) have recently appeared. Of course, in many cases, these issues are naturally related to entropy. We will consider points focusing entropy, chaos, and distributional chaos of periodic dynamical systems. It is not difficult to notice the independence of these concepts. We aim to explore it more deeply in this article. For this purpose, we will use the metric space of all periodic dynamical systems acting in the unit interval. We will prove that each of the sets of systems having a point that has exactly one of the aforementioned properties, and a set of systems having a point that has all of them are dense in the considered space. The natural consequence of this is the remark that each of these sets has an empty interior.
We use standard symbols and notations. By
According to the assumption mentioned earlier, we focus on local properties of dynamical systems consisting of functions from
Consider
A non-autonomous dynamical system is a pair
We say that a dynamical system
Let
By the symbol
The entropy of dynamical systems is one of the basic concepts used in this article (and in many articles connected with dynamical systems). We formulate the definition of entropy following [5]. Let us consider a dynamical system
Lemma 1
[5] Let
Lemma 2
[5] Let
Lemma 3
[5] Let
Now, based on [1,3], we write down useful statements.
Lemma 4
[1] Let
Lemma 5
[3] The topological entropy, regarded as a function
Lemma 6
[1] Assume that
Let us now note the lemma (the proof is obvious) and the corollary that follows from it.
Lemma 7
Consider a non-empty set
Corollary 1
Consider a non-empty set
Next definition is based on [6,15]. In the first of these papers, the full entropy point was defined for dynamical systems consisting of homeomorphisms with positive entropy. In [6], the homeomorphism assumption was abandoned. The definition adopted in this article allows us to consider a wide class of functions.
Let
Theorem 1
Let
Proof
Let us assume the symbols as in the theorem. Since
Let
Assume first that
Now let us suppose that
During the study of the local aspects of dynamical systems, the chaotic points were analyzed, among others. In this article, we base on concepts from [10–12]. Let
We say that a point
In 1994, Schweizer and Smítal have introduced the concept of distributional chaos [14]. Eighteen years later, Dvořáková [4] generalized this notion for the case of non-autonomous dynamical systems. This article is based on this concept. Due to restriction of our considerations to
Let
Let
Now let us note the statement, which will be useful for our consideration. Let us remind that by
2 Main results
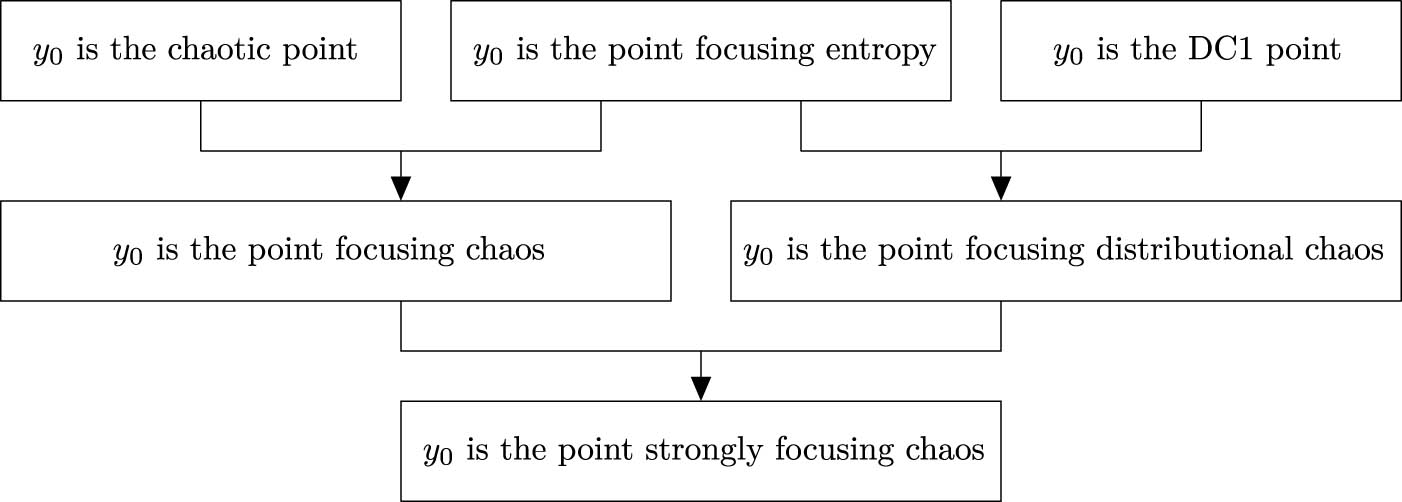
Many mathematicians connect various versions of chaos with positive entropy. For example, in [7], one can find the sentence “It is commonly accepted that an evidence of chaos is positivity of topological entropy.” Taking this into account, let us introduce the following definitions. We say that
Considerations connected with different kinds of chaos, also in the local aspects, require an examination of the interdependence of these concepts. We consider this problem in connection with the space of periodic non-autonomous dynamical systems.
Theorem 2
The following sets are dense in the space
The set of all periodic dynamical systems having the focusing entropy point
The set of all periodic dynamical systems having the chaotic point
The set of all periodic dynamical systems having the distributionally chaotic point
The set of all periodic dynamical systems having the point
Proof
Let
Let us begin with construction of additional dynamical system
We check at once that
and
Now we define a number
Hence,
and
Note that equalities
Following the definitions of
Fix arbitrary
Hence, according to (2) and arbitrariness of
In this way, we have defined the auxiliary dynamical system
To avoid repeating in respective parts of the proof, we will define some dynamical system
So, let
First, we describe a finite sequence
Notice useful properties of the sequence
and hence,
Now we may consider the dynamical system
Consequently,
Fix
Now fix
An easy verification shows that
Observation. The reasoning carried out allows us to conclude that for any dynamical system
In order to simplify the construction of the “
Fix
Note that
Moreover, it is immediate that
From (13), one can infer that
Proof of the part (a)
We start with the definition of the function
It follows easily that
Taking into account the definition of
Of course, the equality
Let us recall the earlier establishment:
Now we will prove that
Fix
Let us put
Moreover, it is easy to see that
Now we will show that
Let
Now we will prove that
Hence,
Note that, according to (10), we obtain
Now we will show that
Put
First, let us consider the case
Now we may assume that
Indeed, suppose that
If there is a subsequence
In view of the obtained contradictions,
Now we will show that
In view of the Observation, the proof of the part (a) has been finished.□
Proof of the part (b)
At the beginning of this proof, we will define the function
Of course,
Recalling the previous establishment, let us put in this case
First, we will show that
Now we will show that
In the next step of the proof, we will show that
So fix
Lemma 2 allows us to calculate
First, we will show
Notice that
Clearly,
The last equality, (25), (26), and Lemma 2 give
In view of the Observation, the proof of the part (b) has been finished.□
Proof of the part (c)
The starting point will be the construction of the auxiliary function
Fix
Notice that
So let a function
Obviously,
For this purpose, consider a sequence of continuous functions
It is not hard to see that the sequence
Indeed. Fix
Fix
From Lemma 5, we have
Now consider the function
Let us denote
Then we may define the continuous function
Obviously
Now note that by (27), we have
In the next step of the proof, we will show that
Fix
From (30), (31), and Lemma 8, we can conclude that
Obviously, if
Before starting the next part of the proof, we will show the auxiliary relationship. Let us fix any different points
We will now show that
Let us fix two different points
First, we consider the case
So, suppose that
Since
Now fix
So let us now suppose that
Since
Thus, we have proved that the pair
We will now prove that
However, we also have
Now suppose, contrary to our claim, that
Of course for any
Let us first consider the case
At the same time, the sequence
From (8) and (35), we infer that
Let us now define disjoint sets
The obtained contradictions mean that
In the next step of this proof, we will show that
Fix
Lemma 6 implies the equality
As mentioned earlier and by Lemma 7, we obtain
After proving (37), we shall return to considerations connected with point focusing entropy. Suppose, contrary to our claim, that
Let us consider
On the other hand, by virtue of Lemma 2, we obtain
From (33), we have
In view of the Observation, the proof of the part (c) has been finished.
Proof of the part (d)
Let
Note that the definition of
Assuming the earlier establishment, let us define the function
Similarly to the proof of (b), it may be shown that
Now we will show that
Fix
Consider
It is easy to notice that
By using (39), it is easy to see that
Moreover, note that
By using (39) in the same way as in the proof of part (c), one can show that
In view of the Observation, the proof of part (d) of Theorem 2 has been finished.□
Taking into account the relationship of individual points (a), (b), (c), and (d) of the Theorem 2, it is not difficult to notice that each of the sets of periodic dynamical system considered in this theorem has an empty interior.
-
Funding information: Faculty of Mathematics and Computer Science. Łódź University (Poland).
-
Conflict of interest: The authors declare that they have no conflict of interest.
References
[1] L. Alsedá, J. Llibre, and M. Misiurewicz, Combinatorial Dynamics and Entropy in dimension One, second edition, Advanced Series in Nonlinear Dynamics, vol. 5. World Scientific Publishing Co. Inc., River Edge, NJ, 2000. 10.1142/4205Search in Google Scholar
[2] F. Balibrea and L. Rucká, Local distributional chaos, Qualitative Theory of Dynamical Systems 21 (2022), 130, DOI: https://doi.org/10.1007/s12346-022-00661-3. 10.1007/s12346-022-00661-3Search in Google Scholar
[3] L. S. Block and W. A. Coppel, Dynamics in one dimension, Lecture Notes in Mathematics, Springer, Berlin, 1992. 10.1007/BFb0084762Search in Google Scholar
[4] J. Dvořáková, Chaos in non-autonomous discrete dynamical systems, Commun. Nonlinear Sci. Numer. Simul. 17 (2012), 4649–4652. 10.1016/j.cnsns.2012.06.005Search in Google Scholar
[5] S. Kolyada and L. Snoha, Topological entropy of non-autonomous dynamical systems, Random Comput Dyn. 4 (1996), no. 2 & 3, 205–233. Search in Google Scholar
[6] E. Korczak-Kubiak and R. J. Pawlak, On local aspects of entropy, In: J. Awrejcewicz, (eds) Dynamical Systems in Theoretical Perspective, DSTA 2017. Springer Proceedings in Mathematics & Statistics, vol. 248, Springer, Cham, 2018, pp. 271–282. 10.1007/978-3-319-96598-7_22Search in Google Scholar
[7] D. Kwietniak and P. Oprocha, Topological entropy and chaos for maps induced on hyperspaces, Chaos Soliton Fractal. 33 (2007), 76–86. 10.1016/j.chaos.2005.12.033Search in Google Scholar
[8] T. Y. Li and J. Yorke, Period three implies chaos, Amer. Math. Month. 82 (1975), 985–992. 10.1080/00029890.1975.11994008Search in Google Scholar
[9] J. Li and X. Ye, Recent development of chaos theory in topological dynamics, Acta Math. Sin. English Ser. 32 (2016), 83–114. 10.1007/s10114-015-4574-0Search in Google Scholar
[10] A. Loranty and R. J. Pawlak, On the local aspects of distributional chaos, Chaos 29 (2019), Article ID 013104, p. 10. 10.1063/1.5046457Search in Google Scholar PubMed
[11] R. J. Pawlak, Distortion of dynamical systems in the context of focusing the chaos around the point, Int. J. Bifur. Chaos 28 (2018), no. 1, Article ID 1850006, p. 13. 10.1142/S0218127418500062Search in Google Scholar
[12] R. J. Pawlak and J. Poprawa, On generators and disturbances of dynamical system in the context of chaotic points, Bulletin Austr. Math. Soc. 100 (2019), no. 1, 1–10. 10.1017/S0004972718001454Search in Google Scholar
[13] S. Ruette, Chaos on the Interval, University Lecture Series, Vol. 67, American Mathematical Society, Providence, Rhode Island, 2017. 10.1090/ulect/067Search in Google Scholar
[14] B. Schweizer and J. Smítal, Measures of chaos and a spectral decomposition of dynamical systems on the interval, Trans. Am. Math. Soc. 344 (1994), 737–754. 10.1090/S0002-9947-1994-1227094-XSearch in Google Scholar
[15] X. Ye and G. Zhang, Entropy points and applications, Trans. Am. Math. Soc. 359 (2007), no. 12, 6167–6186. 10.1090/S0002-9947-07-04357-7Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Asymptotic properties of critical points for subcritical Trudinger-Moser functional
- The existence of positive solution for an elliptic problem with critical growth and logarithmic perturbation
- On some dense sets in the space of dynamical systems
- Sharp profiles for diffusive logistic equation with spatial heterogeneity
- Generic properties of the Rabinowitz unbounded continuum
- Global bifurcation of coexistence states for a prey-predator model with prey-taxis/predator-taxis
- Multiple solutions of p-fractional Schrödinger-Choquard-Kirchhoff equations with Hardy-Littlewood-Sobolev critical exponents
- Improved fractional Trudinger-Moser inequalities on bounded intervals and the existence of their extremals
- The existence of infinitely many boundary blow-up solutions to the p-k-Hessian equation
- A priori bounds, existence, and uniqueness of smooth solutions to an anisotropic Lp Minkowski problem for log-concave measure
- Existence of nonminimal solutions to an inhomogeneous elliptic equation with supercritical nonlinearity
- Non-degeneracy of multi-peak solutions for the Schrödinger-Poisson problem
- Gagliardo-Nirenberg-type inequalities using fractional Sobolev spaces and Besov spaces
- Ground states of Schrödinger systems with the Chern-Simons gauge fields
- Quasilinear problems with nonlinear boundary conditions in higher-dimensional thin domains with corrugated boundaries
- A system of equations involving the fractional p-Laplacian and doubly critical nonlinearities
- A modified Picone-type identity and the uniqueness of positive symmetric solutions for a prescribed mean curvature problem
- On a version of hybrid existence result for a system of nonlinear equations
- Special Issue: Geometric PDEs and applications
- Preface for the special issue on “Geometric Partial Differential Equations and Applications”
- Convex hypersurfaces with prescribed Musielak-Orlicz-Gauss image measure
- Total mean curvatures of Riemannian hypersurfaces
- On degenerate case of prescribed curvature measure problems
- A curvature flow to the Lp Minkowski-type problem of q-capacity
- Aleksandrov reflection for extrinsic geometric flows of Euclidean hypersurfaces
- A note on second derivative estimates for Monge-Ampère-type equations
- The Lp chord Minkowski problem
- Widths of balls and free boundary minimal submanifolds
- Smooth approximation of twisted Kähler-Einstein metrics
- The exterior Dirichlet problem for the homogeneous complex k-Hessian equation
- A Carleman inequality on product manifolds and applications to rigidity problems
- Asymptotic behavior of solutions to the Monge-Ampère equations with slow convergence rate at infinity
- Pinched hypersurfaces are compact
- The spinorial energy for asymptotically Euclidean Ricci flow
- Geometry of CMC surfaces of finite index
- Capillary Schwarz symmetrization in the half-space
- Regularity of optimal mapping between hypercubes
- Special Issue: In honor of David Jerison
- Preface for the special issue in honor of David Jerison
- Homogenization of oblique boundary value problems
- A proof of a trace formula by Richard Melrose
- Compactness estimates for minimizers of the Alt-Phillips functional of negative exponents
- Regularity properties of monotone measure-preserving maps
- Examples of non-Dini domains with large singular sets
- Sharp inequalities for coherent states and their optimizers
- Gradient estimates and the fundamental solution for higher-order elliptic systems with lower-order terms
- Propagation of symmetries for Ricci shrinkers
- Linear extension operators for Sobolev spaces on radially symmetric binary trees
- The Neumann problem on the domain in 𝕊3 bounded by the Clifford torus
- On an effective equation of the reduced Hartree-Fock theory
- Polynomial sequences in discrete nilpotent groups of step 2
- Integral inequalities with an extended Poisson kernel and the existence of the extremals
- On singular solutions of Lane-Emden equation on the Heisenberg group
Articles in the same Issue
- Research Articles
- Asymptotic properties of critical points for subcritical Trudinger-Moser functional
- The existence of positive solution for an elliptic problem with critical growth and logarithmic perturbation
- On some dense sets in the space of dynamical systems
- Sharp profiles for diffusive logistic equation with spatial heterogeneity
- Generic properties of the Rabinowitz unbounded continuum
- Global bifurcation of coexistence states for a prey-predator model with prey-taxis/predator-taxis
- Multiple solutions of p-fractional Schrödinger-Choquard-Kirchhoff equations with Hardy-Littlewood-Sobolev critical exponents
- Improved fractional Trudinger-Moser inequalities on bounded intervals and the existence of their extremals
- The existence of infinitely many boundary blow-up solutions to the p-k-Hessian equation
- A priori bounds, existence, and uniqueness of smooth solutions to an anisotropic Lp Minkowski problem for log-concave measure
- Existence of nonminimal solutions to an inhomogeneous elliptic equation with supercritical nonlinearity
- Non-degeneracy of multi-peak solutions for the Schrödinger-Poisson problem
- Gagliardo-Nirenberg-type inequalities using fractional Sobolev spaces and Besov spaces
- Ground states of Schrödinger systems with the Chern-Simons gauge fields
- Quasilinear problems with nonlinear boundary conditions in higher-dimensional thin domains with corrugated boundaries
- A system of equations involving the fractional p-Laplacian and doubly critical nonlinearities
- A modified Picone-type identity and the uniqueness of positive symmetric solutions for a prescribed mean curvature problem
- On a version of hybrid existence result for a system of nonlinear equations
- Special Issue: Geometric PDEs and applications
- Preface for the special issue on “Geometric Partial Differential Equations and Applications”
- Convex hypersurfaces with prescribed Musielak-Orlicz-Gauss image measure
- Total mean curvatures of Riemannian hypersurfaces
- On degenerate case of prescribed curvature measure problems
- A curvature flow to the Lp Minkowski-type problem of q-capacity
- Aleksandrov reflection for extrinsic geometric flows of Euclidean hypersurfaces
- A note on second derivative estimates for Monge-Ampère-type equations
- The Lp chord Minkowski problem
- Widths of balls and free boundary minimal submanifolds
- Smooth approximation of twisted Kähler-Einstein metrics
- The exterior Dirichlet problem for the homogeneous complex k-Hessian equation
- A Carleman inequality on product manifolds and applications to rigidity problems
- Asymptotic behavior of solutions to the Monge-Ampère equations with slow convergence rate at infinity
- Pinched hypersurfaces are compact
- The spinorial energy for asymptotically Euclidean Ricci flow
- Geometry of CMC surfaces of finite index
- Capillary Schwarz symmetrization in the half-space
- Regularity of optimal mapping between hypercubes
- Special Issue: In honor of David Jerison
- Preface for the special issue in honor of David Jerison
- Homogenization of oblique boundary value problems
- A proof of a trace formula by Richard Melrose
- Compactness estimates for minimizers of the Alt-Phillips functional of negative exponents
- Regularity properties of monotone measure-preserving maps
- Examples of non-Dini domains with large singular sets
- Sharp inequalities for coherent states and their optimizers
- Gradient estimates and the fundamental solution for higher-order elliptic systems with lower-order terms
- Propagation of symmetries for Ricci shrinkers
- Linear extension operators for Sobolev spaces on radially symmetric binary trees
- The Neumann problem on the domain in 𝕊3 bounded by the Clifford torus
- On an effective equation of the reduced Hartree-Fock theory
- Polynomial sequences in discrete nilpotent groups of step 2
- Integral inequalities with an extended Poisson kernel and the existence of the extremals
- On singular solutions of Lane-Emden equation on the Heisenberg group