The geometry of rank drop in a class of face-splitting matrix products: Part II
-
Erin Connelly
 and
Cynthia Vinzant
and
Cynthia Vinzant

Abstract
Given k ≤ 9 points (xi, yi) ∈ ℙ2 × ℙ2, we characterize rank deficiency of the k × 9 matrix Zk with rows
1 Introduction
We are interested in solving the following problem, where ⊗ denotes the Kronecker product:
Problem 1.1
Given k ≤ 9 points (xi, yi) ∈ ℙ2 × ℙ2, consider the k × 9 matrix Zk whose rows are
Delineate the geometry of point configurations {xi} and {yi} for which rank(Zk) < k.
Note that Problem 1.1 can be rephrased geometrically and generalized to any algebraic variety.
Problem 1.2
Given k ≤ 9 points (xi, yi) ∈ ℙ2 × ℙ2, delineate the geometry of the point configurations {xi} and {yi} for which the subspace spanned by the images of these points under the Segre embedding of ℙ2 × ℙ2 in ℙ8 has dimension less than k − 1.
Problem 1.1 arises in the study of reconstruction problems in 3D computer vision. For background on the problem and related work we direct the reader to Part I of this work [3] where Problem 1.1 was solved for k ≤ 6. The results relied on the classical invariant theory of points in ℙ2 and the theory of cubic surfaces. In this paper we complete the characterization for the remaining cases k = 7, 8, 9. Once again, the results can be phrased in terms of classical algebraic geometry and invariants.
Semi-genericity
Throughout this paper, we will concern ourselves with point configurations that are semi-generic; a configuration of k point pairs (xi, yi) is semi-generic if every subset of k − 1 point pairs is fully generic. That is, we say that a property holds for a semi-generic choice of (xi, yi) ∈ (ℙ2 × ℙ2)k if there is a nonempty Zariski open set 𝓤 ⊆ (ℙ2 × ℙ2)k−1 so that the property holds whenever {(xi, yi) : i ≠ j} lies in 𝓤 for all j = 1, …, k. Despite the name, semi-genericity is actually a stronger notion than usual genericity. We use this name because often the property of interest for points in (ℙ2 × ℙ2)k is that two algebraic conditions coincide, whereas generic points satisfy neither algebraic condition. As a small example of this usage, let us instead consider a semi-generic pair of points x1, x2 in the line ℝ. Consider f(x1, x2) = x1(x2 − 1)(x1 − x2). Then f(x1, x2) = 0 if and only if x1 = 0, x2 = 1, or x1 = x2. For generic (x1, x2), f(x1, x2) ≠ 0. Semi-genericity only allows us to exclude algebraic conditions on x1 and x2 individually. In this example, a semi-generic pair of points (x1, x2) satisfies f(x1, x2) = 0 if and only if x1 = x2. This holds whenever x1, x2 ∈ 𝓤 = ℝ ∖ {0, 1}.
Summary of results and organization of the paper
In [3] we studied Problem 1.1 algebraically by decomposing the ideal generated by the maximal minors of Zk into its prime components and examining only those components that did not correspond to rank drop conditions for a submatrix of Zk with at most k − 1 rows, called inherited conditions, for the rank deficiency of Zk. Through this we obtained both algebraic conditions that completely characterized rank drop, and geometric conditions that characterized rank drop under mild genericity assumptions. This method cannot be applied to the cases k = 7, 8, 9 due to computational limitations. Additionally, in these cases, the novel component of rank drop has a greater dimension than all the components of inherited conditions. Previously, for k ≤ 5 the novel component had a strictly lower dimension than the variety of inherited conditions, and for k = 6 the novel component had dimension equal to that of the inherited conditions variety. For this reason, we largely concern ourselves only with the geometric characterization of rank drop for semi-generic configurations with k = 7, 8, 9, rather than an algebraic characterization beyond the vanishing of the maximal minors of Zk.
In Section 2 we establish a number of facts about Cremona transformations, cubic curves, and projective reconstructions that we will use throughout the paper. In Section 3 we study the problem for k = 8 and prove that Zk is rank deficient exactly when there is a quadratic Cremona transformation f : ℙ2 ⇢ ℙ2 such that f(xi) = yi for all i (Theorem 3.1). To do so, we establish a correspondence between three sets: lines in the nullspace of Zk, quadrics passing through a projective reconstruction of the input point pairs, and Cremona transformations sending xi ↦ yi (Theorem 3.16 which depends on Theorem 3.2). We refer to this as the trinity correspondence and it is the foundation for all of our results in this paper. In Section 4 we study the problem for k = 7 and prove that Zk is rank deficient exactly when there are cubic curves in each copy of ℙ2, passing through all seven points, and an isomorphism between these curves that sends xi ↦ yi (Theorem 4.2). We further prove that this occurs exactly when seven particular cubic curves in each copy of ℙ2 are coincident and we provide an algebraic characterization when this occurs (Theorem 4.11). In Section 5 we answer Problem 1.1 for k = 9, which is largely straight-forward (Theorem 5.1). We summarize our results in Section 6 and state a geometric consequence about reconstructions of semi-generic point pairs of size six, seven and eight.
2 Background and tools
2.1 Quadratic Cremona transformations and cubic curves
Definition 2.1
A quadratic Cremona transformation of ℙ2 is a birational automorphism f : ℙ2 ⇢ ℙ2 defined as f(x) = (f1(x) : f2(x) : f3(x)) where f1, f2, f3 are homogeneous quadratic polynomials in x = (x1, x2, x3).
We drop the word “quadratic” from now on as all the Cremona transformations we consider will be quadratic. Each Cremona transformation can be obtained by blowing up three points a1, a2, a3 in the domain (called base points) at which the transformation is not defined, and collapsing three lines γ1, γ2, γ3 (called exceptional lines) which contain pairs of base points: for distinct i, j, k, the line γi contains aj, ak. Generically, the base points and exceptional lines of a Cremona transformation will all be distinct; when they are not all distinct, the transformation is said to be degenerate. In this paper we will consider only non-degenerate Cremona transformations.
The inverse of a Cremona transformation f is also a Cremona transformation with base points b1, b2, b3 and exceptional lines τ1, τ2, τ3 in the codomain of f. The map f sends γi ↦ bi while f−1 sends τi ↦ ai. For simplicity we will often refer to both the base points in the domain and the base points in the codomain (i.e. the base points of f−1) as the base points of f. The standard Cremona transformation is
which has base points (1 : 0 : 0), (0 : 1 : 0), (0 : 0 : 1) and exceptional lines xi = 0 for i = 1, 2, 3. This transformation is an involution since it is its own inverse, and the base points and exceptional lines of f−1 are again (1 : 0 : 0), (0 : 1 : 0, (0 : 0 : 1) and xi = 0 for i = 1, 2, 3. All Cremona transformations differ from the standard one only by projective transformations as stated below.
Lemma 2.2
Let g be a Cremona transformation and let f be the standard Cremona involution. Then there are projective transformations H1, H2 such that g = H1 ∘ f ∘ H2.
Proof
Let a1, a2, a3 ∈ ℙ2 denote the base points of g. The coordinates (g1, g2, g3) of g form a basis for the three-dimensional vector space of quadratics vanishing on the points a1, a2, a3. Another basis is h = (ℓ2 ℓ3, ℓ1ℓ3, ℓ1ℓ2) where ℓi ∈ ℂ[x, y, z]1 defines the line joining aj and ak for every labeling {i, j, k} = {1, 2, 3}. Therefore there is some invertible linear transformation H1 for which g = H1h. Similarly, (ℓ1, ℓ2, ℓ3) is a basis for ℂ[x, y, z]1 and so there is a linear transformation H2 for which H2 (x, y, z) = (ℓ1, ℓ2, ℓ3). The map h is given by f ∘ H2 and so g = H1 ∘ f ∘ H2. □
Throughout this paper we are interested in ℙ2 × ℙ2 and we typically denote points in the first ℙ2 by x and those in the second ℙ2 by y. The notation
Lemma 2.3
Let f :
where a, b, c ∈ ℂ ∖ {0}.
Proof
Suppose that f = (f1, f2, f3) where f1, f2, f3 are quadratic polynomials. Since f is undefined at the three base points in the domain, it follows that f1, f2, f3 contain only the monomials x1x2, x1x3, x2x3. Moreover, we know that f(x1, x2, 0) = (0 : 0 : 1). It follows that f1, f2 do not contain the monomial x1x2. In examining the other two exceptional lines, we find that f1, f2, f3 contain only one monomial each and that f has the desired form. □
We note that the choice of (a, b, c) is equivalent to specifying a single point correspondence p ↦ q, where neither p nor q lie on an exceptional line. It follows that a Cremona transformation has 14 degrees of freedom: six from the base points in the domain, six from the base points in the codomain, and two from the choice of a single point correspondence.
Next we prove some facts about Cremona transformations and isomorphisms of cubic curves.
Definition 2.4
Let f be a Cremona transformation with base points B(f). For a curve C ⊂ ℙ2, define f(C) := f(C ∖ B(f)), and for a given point p, let νp(C) be the multiplicity of the curve C at the point p.
Lemma 2.5
(See [4]). Let C ⊂ ℙ2 be a plane curve of degree n and let f be a Cremona transformation. Then
In particular, if C is a smooth cubic curve then f(C) is also a cubic curve if and only if the base points of f lie on C. In this case, f−1(f(C)) = C implies that the base points of f−1 lie on f(C).
Using this, we can prove the following result.
Lemma 2.6
Let C be a smooth cubic curve and let f be a Cremona transformation with base points a1, a2, a3 ∈ C in the domain and b1, b2, b3 in the co-domain. Then f(C) is a smooth cubic curve and f̄ : C → f(C), defined by taking the closure of f|C∖B(f), is an isomorphism.
Proof
By Lemma 2.5, f(C) is a cubic curve. Moreover, since f−1(f(C)) = C is a cubic curve, it also follows that b1, b2, b3 ∈ f(C). The fact that f̄ is an isomorphism follows from the corollary after [8, § 1.6, Theorem 2] which says that a birational map between nonsingular projective plane curves is regular at every point, and is a one-to-one correspondence. □
Given a smooth cubic curve C, any automorphism g : C → C is of the form u ↦ au + b with a = ± 1, b ∈ C, where addition is defined via the group law on C. Theorem 1.3 in [4] states that given a smooth cubic curve C and an automorphism g : C → C defined by some multiplier a = ± 1 and some translation b ∈ C, the automorphism g is induced by a Cremona transformation with base points a1, a2, a3 if and only if a(a1 + a2 + a3) = 3b, where again, addition is with respect to the group law on C. In particular, every automorphism of C is induced by a two-parameter family of Cremona transformations, which we obtain by picking the first two base points arbitrarily and then letting the third base point be determined by the equation a3 = a(3b − a1 − a2).
We can use this to prove a converse to Lemma 2.6.
Lemma 2.7
Let f : C → C′ be an isomorphism of smooth cubic plane curves. Then there is a two-parameter family of Cremona transformations
Proof
Since C and C′ are isomorphic, they have the same Weierstraß form C0. There are therefore homographies H1, H2 ∈ PGL(3) such that H1(C) = C0 = H2(C′) and therefore
2.2 Fundamental matrices and projective reconstruction
In this paper we will be concerned with pairs of linear projections π1, π2 : ℙ3 ⇢ ℙ2 with non-coincident centers c1, c2. In the context of computer vision, these arise as projective cameras which are linear projections from ℙ3(ℝ) ⇢ ℙ2(ℝ), represented by (unique) matrices A1, A2 ∈ ℙ(ℝ3×4) of rank three, such that πi(p) ∼ Ai p for all world points p ∈ ℙ3(ℝ). The notation ∼ indicates equality in projective space. The centers ci are the unique points in ℙ3(ℝ) such that Aici = 0 for i = 1, 2. The projections we consider in this paper are slightly more general in that they work over ℂ; they are represented by rank three matrices Ai ∈ ℙ(ℂ3×4) and send p ∈ ℙ3 to Aip ∈ ℙ2.
In the vision setting, the image formation equations Aip = λi πi(p) with i = 1, 2 and some λi ∈ ℝ imply that for all p ∈ ℙ3(ℝ) one has
for a unique matrix F ∈ ℙ(ℝ3×3) of rank two, determined by (A1, A2); see [6, Chapter 9.2]. This matrix F is called the fundamental matrix of the cameras/projections (A1, A2) / (π1, π2). It defines the bilinear form BF(x, y) = y⊤ F x such that BF(π1(p), π2(p)) = π2(p)⊤ F π1(p) = 0 for all p ∈ ℙ3(ℝ). The entries of F are certain 4 × 4 minors of the 6 × 4 matrix obtained by stacking A1 on top of A2. The points ex := π1(c2) and ey := π2(c1) are called the epipoles of F. It is well-known, see [6, Chapter 9.2], that ex and ey are the unique points in ℙ2 such that Fex = 0 = (ey)⊤ F. Conversely, for every rank-two matrix F ∈ ℙ(ℝ3×3) there exists, up to projective transformation, a unique pair of cameras (A1, A2) / linear projections π1, π2 : ℙ3(ℝ) ⇢ ℙ2(ℝ) with fundamental matrix F, see [6, Theorem 9.10]. All of these facts extend verbatim over ℂ, and we call a rank two matrix F ∈ ℙ(ℂ3×3) a fundamental matrix of (π1, π2) if it satisfies (4).
Equation (4) is a constraint on the images of a world point in two cameras. Going the other way, given k point pairs (xi, yi) ∈ ℙ2(ℝ) × ℙ2(ℝ), one can ask if they admit a projective reconstruction, namely a pair of real cameras A1, A2 and real world points p1, …, pk such that A1 pi ∼ xi and A2 pi ∼ yi for i = 1, …, k. A necessary condition for a reconstruction is the existence of a rank-two matrix F ∈ ℙ(ℝ3×3) such that
3 The case k = 8
In this section we characterize the rank deficiency of Z = Z8 =
Theorem 3.1
For eight semi-generic point pairs
Proof of the if-direction
Suppose that we have a Cremona transformation f :
which one can see is rank deficient because its first, fifth and ninth columns are the same. □
In order to prove the only-if direction of Theorem 3.1, we develop a number of tools in § 3.1. The proof of Theorem 3.1 will then be completed in Subsection 3.2.
3.1 The trinity of lines, quadrics and Cremona transformations
In order to establish the trinity correspondence, we need to introduce some genericity conditions for our main objects of interest. We say that a line ℓ ⊂ ℙ(ℂ3×3) is generic if it contains exactly three rank-two matrices. These lines are generic in the usual sense, since almost all lines in ℙ(ℂ3×3) intersect the degree-three determinantal variety 𝓓 := {X ∈ ℙ(ℂ3×3) : det(X) = 0} in three distinct points. Furthermore, given a pair of linear projections π1, π2 : ℙ3 ⇢ ℙ2 with distinct centers c1, c2 we say that a smooth quadric Q through c1, c2 is permissible if it does not contain the line c1c2 connecting the two centers.
Theorem 3.2
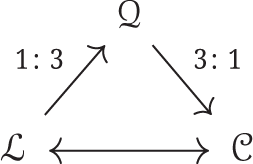
(Trinity correspondence). Consider the following three sets:
𝓛: the set of all generic lines ℓ in ℙ(ℂ3×3),
𝓠: the set (up to projective equivalence) of pairs of linear projections π1, π2 : ℙ3 ⇢ ℙ2 with non-coincident centers c1, c2, along with a permissible quadric Q ⊂ ℙ3 through c1, c2,
𝓒: the set of (non-degenerate) Cremona transformations from ℙ2 ⇢ ℙ2.
Then there is a 1 : 1 correspondence between 𝓛 and 𝓒, a 1 : 3 correspondence between 𝓛 and 𝓠, and a 3 : 1 correspondence between 𝓠 and 𝓒, such that the diagram (6) commutes:
A similar theorem holds for lines which pass through exactly two rank-two matrices; however, we do not prove it here.
We first show that for fixed linear projections π1, π2 with centers c1 ≠ c2 ∈ ℙ3, there is a bijection between the quadrics that contain c1, c2 and lines in ℙ(ℂ3×3) through the fundamental matrix F of (π1, π2). This result is well-known in the context of computer vision (see [1], [5]), but we write an independent proof below.
Lemma 3.3
Fix a pair of linear projections π1, π2 : ℙ3 ⇢ ℙ2 with non-coincident centers c1, c2 and let F be its fundamental matrix. There is a 1 : 1 correspondence between the quadrics Q ⊂ ℙ3 through c1, c2 and the lines ℓ ⊂ ℙ(ℂ3×3) through F.
Proof
Applying projective transformations, we can assume that c1 = (1 : 0 : 0 : 0), c2 = (0:1:0:0), π1(u1 : u2 : u3 : u4) = (u2 : u3 : u4) and π2(u1 : u2 : u3 : u4) = (u1 : u3 : u4). If F = (Fij) is the fundamental matrix of (π1, π2), then for all u ∈ ℙ3 we have
Since the entries in position (2, 3) and (3, 2) of π2(u) π1(u)⊤ are the same, F is a scalar multiple of
and BF(x, y) = x3 y2 − x2 y3. In particular, there exists some p ∈ ℙ3 with π1(p) = x and π2(p) = y if and only if x3 y2 = x2 y3.
Consider the image of φ : ℙ3 ⇢ ℙ(ℂ3×3) where φ(u) = π2(u) π1(u)⊤. By (7), φ(ℙ3) is contained in the hyperplane F⊥ ⊂ ℙ(ℂ3×3). Any matrix in ℙ(ℂ3×3) can be written as sF + M for some scalar s and M ∈ F⊥. Therefore,
since π2(u)⊤ F π1(u) = 0, and any linear function on the image of φ can be identified with its image in F⊥. On the other hand, a line ℓ in ℙ(ℂ3×3) through F is of the form {sF + tM : (s : t) ∈ ℙ1}, where M ∈ F⊥. Therefore, lines through F are in bijection with linear functions on φ(ℙ3), up to scaling.
The monomials
Corollary 3.4
Let π1, π2 : ℙ3 ⇢ ℙ2 be two linear projections with centers c1 ≠ c2 and fundamental matrix F. Let ℓF be a line in ℙ(ℂ3×3) through F. The correspondence ℓF ↦ Q, where Q ⊂ ℙ3 is a quadric passing through c1, c2, is as follows. Let M ∈ ℓF be any M ≠ F. Then Q is cut out by the bilinear form
The following result is well-known and can be proven by writing a comprehensive list of the equivalence classes, under projective transformation, of quadrics through a pair of distinct points and then testing an example from each class.
Lemma 3.5
([1], [5], [6, Result 22.11]). Under the 1 : 1 correspondence in Lemma 3.3, the line ℓ corresponds to a permissible quadric Q through c1, c2 if and only if ℓ is a generic line.
Next we prove that permissible quadrics through c1, c2 give rise to quadratic Cremona transformations from ℙ2 ⇢ ℙ2. Recall that all Cremona transformations we consider are assumed to be non-degenerate.
Lemma 3.6
Fix πi : ℙ3 ⇢ ℙ2 to be linear projections with non-coincident centers ci for i = 1, 2. A permissible quadric Q through c1, c2 defines a Cremona transformation f : ℙ2 ⇢ ℙ2 such that f(π1(p)) = π2(p) for any point p ∈ Q. The base points of f are π1(c2) and the image under π1 of the two lines contained in Q passing through c1. Similarly, the base points of f−1 are π2(c1) and the image under π2 of the two lines contained in Q passing through c2.
Proof
Since c1, c2 ∈ Q, the restriction of π1 (and π2) to Q is generically 1 : 1. Therefore, π1(Q) and π2(Q) are each birational to a ℙ2. The map f will be π2 ∘ (π1|Q)−1. Let us check that this is a quadratic Cremona transformation.
As before, we can take π1(u) = (u2 : u3 : u4) and π2(u) = (u1 : u3 : u4). Then c1 = (1 : 0 : 0 : 0) is the kernel of π1, and we are given that it lies on Q. As we saw already, these assumptions imply that Q is defined by the vanishing of a polynomial of the form q(u) = α u1 u2 + β u1 + γ u2 + δ where α ∈ ℂ is a scalar, β, γ ∈ ℂ[u3, u4] are of degree 1, and δ ∈ ℂ[u3, u4] is of degree 2. We can then write q as
where a = (α u2 + β), b = (γ u2 + δ) ∈ ℂ[u2, u3, u4] with deg(a) = 1, deg(b) = 2. The map (π1|Q)−1 is then given by
To verify this, first check that π1(u) = a(x) ⋅ x where ⋅ denotes scalar multiplication. To see that u ∈ Q we compute
where the last equality comes from the homogeneity of a, b with deg(a) = 1, deg(b) = 2.
Composing with π2 we have
whose coordinates are indeed quadratic. Since f = π2 ∘ (π1|Q)−1 is defined by quadratics and generically 1 : 1, it is a quadratic Cremona transformation.
To show that this transformation is non-degenerate, we must demonstrate that it has three unique base points. To understand the base points of f, recall that on a smooth quadric surface there are two distinct (possibly complex) lines passing through each point. The images of the two lines passing through c1 under the projection π1 will each be a single point. Therefore f is not well-defined on these image points in ℙ2. Similarly, f is undefined on π1(c2) since
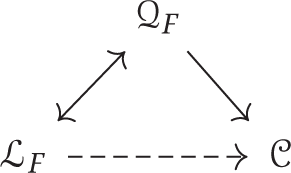
Thus far we have shown that if we fix linear projections π1, π2 : ℙ3 ⇢ ℙ2 with centers c1 ≠ c2 in ℙ3, then there is a bijection between permissible quadrics through c1, c2 and generic lines through the fundamental matrix F of (π1, π2). Furthermore, there is a map sending each generic line through F (permissible quadric through c1, c2) to the Cremona transformation from ℙ2 ⇢ ℙ2 given by π2 ∘ (π1|Q)−1. These correspondences are summarized in (14), where 𝓛F is the set of all generic lines through F and 𝓠F is the set of all permissible quadrics through c1, c2.
We can make the correspondence between generic lines through F and Cremona transformations even more explicit.
Lemma 3.7
Given a generic line ℓ ⊂ ℙ(ℂ3×3), the set of points (x, y) ∈ ℙ2 × ℙ2 satisfying yT Mx = 0 for all M ∈ ℓ coincides with the closure of the graph {(x, f(x)) : x ∈ ℙ2 ∖ B(f)} of a unique Cremona transformation f : ℙ2 ⇢ ℙ2. This gives a 1 : 1 correspondence between generic lines ℓ ⊂ ℙ(ℂ3×3) and Cremona transformations f : ℙ2 ⇢ ℙ2. Moreover, when F ∈ ℓ has rank two, this Cremona transformation agrees with that induced by the maps 𝓛F → 𝓠F → 𝓒.
Proof
Since ℓ is generic, we may assume without loss of generality that ℓ = span{F, M} where F has rank two. This gives a pair of linear projections π1, π2 : ℙ3 ⇢ ℙ2 with non-coincident centers c1, c2 with fundamental matrix F. In the 1 : 1 correspondence 𝓛F ↔ 𝓠F given in Corollary 3.4, the line ℓ corresponds to the permissible quadric Q given by the zero set of q(u) = π2(u)⊤ Mπ1(u). By Lemma 3.6, the Cremona transformation f : ℙ2 ⇢ ℙ2 corresponding to q(u) in the correspondence 𝓠F → 𝓒 satisfies f(π1(p)) = π2(p) for all p ∈ Q ∖ {c1, c2}. Since π1(Q) is dense in ℙ2, the graph of f and the set {(π1(p), π2(p)): p ∈ Q ∖ {c1, c2}} ⊂ ℙ2 × ℙ2 are both two-dimensional, as is their intersection. Each is the image of an irreducible variety under a rational map and so the Zariski-closures of these two sets are equal. By construction, this is contained in the zero sets of yTFx and yTMx, as π2(p)T Fπ1(p) = 0 for all p ∈ ℙ3 and π2(p)T Mπ1(p) = 0 for all p ∈ Q. Since F, M are linearly independent, the variety {(x, y) : yT Fx = yTMx = 0} in ℙ2 × ℙ2 is two-dimensional. It therefore coincides with the Zariski-closure of the graph of f.
Conversely, suppose that f : ℙ2 ⇢ ℙ2 is a Cremona transformation. We claim that {f(x)x⊤ : x ∈ ℂ3} spans a 7-dimensional linear space V ⊂ ℂ3×3. Up to projective transformations on
One can check explicitly that seven distinct monomials appear in this matrix and so the span of all such matrices is 7-dimensional. Projectively, the orthogonal complement gives a line ℓ = V⊥ in ℙ(ℂ3×3). By definition, ℓ is exactly the set of all matrices M such that y⊤ Mx = 0 for all (x, y) in the graph of f. Under the assumption that f is the standard Cremona transformation, ℓ is the span of the diagonal matrices F1 = diag(1, −1, 0) and F2 = diag(0, 1, −1); in general ℓ will be projectively equivalent to this line. We can verify that this line contains exactly the three rank-two matrices F1, F2, F1 + F2, and is therefore generic. □
Remark 3.8
Given ℓ = span{F, M} we can solve for the coordinates of the corresponding Cremona transformation f : ℙ2 ⇢ ℙ2 as follows. Given x ∈ ℙ2, the corresponding point y = f(x) will be the left kernel of the 3 × 2 matrix
The next two results finish off the proof of the trinity correspondence (6) and the proof of Theorem 3.2.
Lemma 3.9
Let ℓ be a generic line in ℙ(ℂ3×3), i.e., ℓ contains three rank-two matrices F1, F2, F3.
Then ℓ gives rise to three permissible quadrics Q1, Q2, Q3 ⊂ ℙ3, each containing the centers of a pair of linear projections with fundamental matrices F1, F2, F3 respectively.
The quadrics Q1, Q2, Q3, in conjunction with their distinguished linear projections, all induce the same Cremona transformation f. The base points of f are
Proof
A generic line ℓ ⊂ ℙ(ℂ3×3) intersects the determinantal variety 𝓓 cut out by det X = 0 in three rank-two matrices F1, F2, F3. Each Fi is the fundamental matrix of a pair of linear projections ℙ3 ⇢ ℙ2 with non-coincident centers, and by Lemma 3.3 and Lemma 3.5 there is a unique permissible quadric Qi through these centers corresponding to the line ℓ. By Lemma 3.7, each of these quadrics induces the same Cremona transformation f : ℙ2 ⇢ ℙ2.
To conclude, we show that the base points of f and f−1 are
Corollary 3.10
The correspondence 𝓠 → 𝓒 is 3 : 1.
Proof
Let Q = (Q, π1, π2) ∈ 𝓠 be a permissible quadric along with a pair of linear projections that correspond to f ∈ 𝓒. If F is the fundamental matrix associated to (π1, π2), then there exists a unique generic line ℓ through F corresponding to Q by Lemma 3.3 and Lemma 3.5. With the full trinity correspondence, this line ℓ contains three fundamental matrices F1, F2, F3 corresponding to Q1, Q2, Q3 ∈ 𝓠 that each produce the Cremona transformation f. Moreover, by Lemma 3.7 this line ℓ is the unique line in ℙ(ℂ3×3) corresponding to f. Therefore if Q′ ∈ 𝓠 is such that Q′ ↦ f it follows that
This completes the proof of Theorem 3.2. A consequence of Theorem 6 is the following generalization of Problem 1.2.
Theorem 3.11
Given a generic codimension-two subspace V ⊂ ℙ(ℂ3×3), the intersection of V with R1, the Segre embedding of ℙ2 × ℙ2, is a del Pezzo surface of degree six, and can be described explicitly via the trinity correspondence. Specifically, if g : ℙ2 ⇢ ℙ2 is the Cremona transformation corresponding to the line V⊥, then
Proof
For convenience, we denote
To see that this is a degree-six del Pezzo surface, we show that V1 can be obtained as the blowup of ℙ2 in three non-collinear points, specifically, at the base points of g:
In particular, V1 must be Zariski closed and it follows by Lemma 3.7 that V ∩ R1 = V1. □
3.2 Back to the proof of Theorem 3.1
Before we can adapt the trinity correspondence to the reconstruction of point pairs, we need to address a certain kind of degeneracy. Given a configuration of point pairs P =
Lemma 3.12
Suppose that P =
Proof
Suppose, without loss of generality,
since F2 ∈ 𝓝Z. Therefore, by Corollary 3.4, p ∈ Q and thus c1 c2 ⊂ Q, which is a contradiction since Q is permissible. □
Even though a rank-two matrix F on a generic line in 𝓝Z cannot have
Definition 3.13
A generic line ℓ ⊆ 𝓝Z is P-degenerate if there exists a rank-two matrix F ∈ ℓ such that either Fxi = 0 or
Any rank-two matrix F in a P-generic line will give a reconstruction c1, c2, p1, …, pk of the point pairs P. That is, there will be linear projections π1, π2 : ℙ3 ⇢ ℙ2 with centers c1, c2 so that
Definition 3.14
A quadric Q ⊂ ℙ3 passes degenerately through a reconstruction
Definition 3.15
A Cremona transformation f : ℙ2 ⇢ ℙ2 maps xi ↦ yi degenerately if xi is a base point of f and yi lies on the corresponding exceptional line, or symmetrically, yi is a base point of f−1 and xi lies on the corresponding exceptional line.
Generically, the trinity correspondence specializes to the reconstruction of point pairs in an intuitive way.
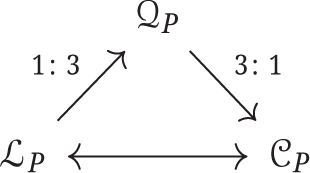
Theorem 3.16
Given a configuration of point pairs P =
𝓛P : the set of all P-generic lines ℓ ⊆ 𝓝Z := nullspace(Z),
𝓠P : the set (up to projective equivalence) of all permissible quadrics passing non-degenerately through some reconstruction c1, c2, p1, …, pk of P,
𝓒P : the set of all Cremona transformations f : ℙ2 ⇢ ℙ2 mapping xi ↦ yi non-degenerately for all i = 1, …, k.
Then there is a 1 : 1 correspondence between the elements of 𝓛P and 𝓒P, a 1 : 3 correspondence between the elements of 𝓛P and 𝓠P, and a 3 : 1 correspondence between the elements of 𝓠P and 𝓒P as in the diagram
Proof
We need to show that the trinity correspondence (6) can be restricted to the sets 𝓛P, 𝓠P, 𝓒P. We will therefore examine each leg of this diagram.
(𝓛P → 𝓠P) We begin by considering a P-generic line ℓ = span{F, M} ⊆ 𝓝Z. Without loss of generality, we can take F to be one of the three fundamental matrices in ℓ with corresponding projections π1, π2 : ℙ3 ⇢ ℙ2 with non-coincident centers c1, c2 that give reconstructions p1, …, pk ∈ ℙ3 of the point pairs P. By Lemma 3.3, the line ℓ corresponds to a smooth permissible quadric Q defined by the vanishing of q(u) = π2(u)T Mπ1(u). For any point pi in the reconstruction, we have
since M ∈ ℓ ⊂ 𝓝Z. Therefore Q passes through the reconstruction c1, c2, p1, …, pk. It remains to show that it does so non-degenerately. By Lemmas 3.6 and 3.9, a reconstructed point pi lies on one of the lines through c1 (or symmetrically through c2) if and only if there exists M ∈ ℓ such that Mxi = 0 (or symmetrically
(𝓠P → 𝓒P) Consider a permissible quadric Q passing through a reconstruction c1, c2, p1, …, pk of P with linear projections π1, π2. As in Theorem 3.2, the tuple (Q, π1, π2) induces a Cremona transformation f := π2 ∘ (π1|Q)−1. By Lemma 3.6, the base points of f are the images of the point c2 and each of the lines in Q passing through c1. Since pi ≠ c2 and does not belong to these lines, the point xi = π1(pi) is not a base point of f. Similarly, the base points of f−1 are the images of the point c1 and the lines in Q passing through c2 under π2, so a symmetric argument shows that yi = π2(pi) is not a base point of f−1. Therefore f maps xi = π1(pi) to yi = π2(pi) non-degenerately.
(𝓒P → 𝓛P) Consider a Cremona transformation f : ℙ2 ⇢ ℙ2 such that xi ↦ yi non-degenerately for all i. As in Lemma 3.7, f corresponds to a unique line ℓ ⊂ ℙ(ℂ3×3) defined by the property that f(x)⊤ Mx = 0 for all M ∈ ℓ and x ∈ ℙ2. In particular,
Remark 3.17
The assumptions of non-degeneracy can be removed from the 1 : 1 correspondence between generic lines in 𝓝Z and Cremona transformations mapping xi ↦ yi. Extending this to quadrics is more subtle, as some rank-two matrices F ∈ ℓ ⊂ 𝓝Z may not give full reconstructions of the point pairs P.
Proof of the only-if direction of Theorem 3.1
For 8 semi-generic point pairs, the matrix Z =
Since ℓ is P-generic, by Theorem 3.16, ℓ gives rise to a Cremona transformation f :
We end this section by demonstrating the trinity correspondence for an example, beginning with a single quadric through a reconstruction.
Example 3.18
Consider the quadric Q ⊂ ℙ3 defined by the equation x2 + y2 − z2 − w2 = 0 and the following 10 points p1, …, p8, c1, c2 ∈ Q:
The two projections (cameras) with centers c1, c2 have matrices
and we can calculate the image points and epipoles:
The point pairs (xi, yi) give us the matrix
which we can check is rank deficient and has nullspace spanned by the vectors
The reconstruction we started with has fundamental matrix
and if we take a different matrix
in the nullspace of Z8 we can verify that
The other two possible choices for fundamental matrices in the nullspace of Z8 are
which have epipoles
such that f(xi) = yi for all i. This Cremona transformation has base points exactly matching the epipoles. Finally, we can check that each camera center lies on two real lines on the quadric Q, parameterized by (a : b) ∈ ℙ1 as
whose images are exactly the other two possible pairs of epipoles/base points
4 The case k = 7
We now come to the case of k = 7 point pairs. In order to understand the case of seven point pairs, we first need to understand six generic point pairs
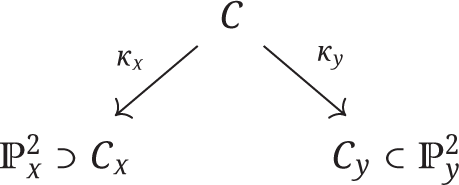
By the composition κy ∘
Example 4.1
Consider the following six point pairs:
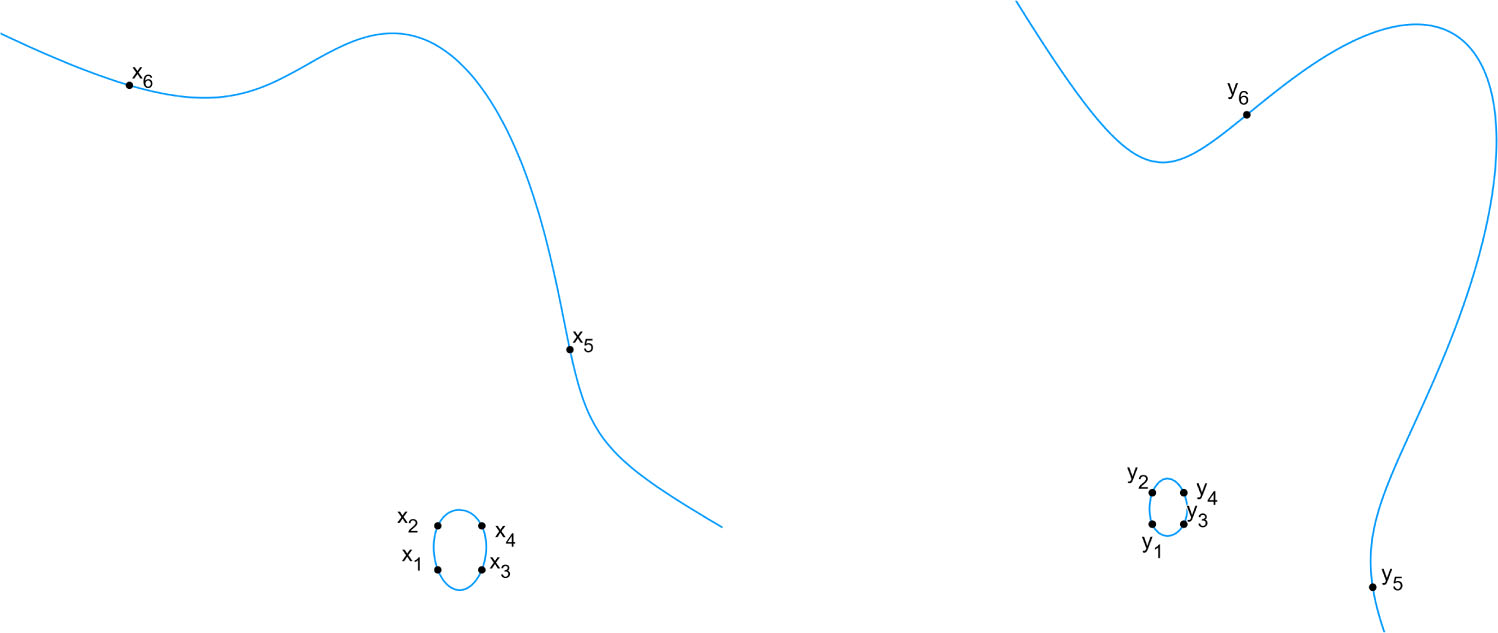
The cubic curves Cx and Cy from Example 4.1, with xi and yi labeled.
Figure 1 shows the curves Cx and Cy. Observe that xi ∈ Cx and yi ∈ Cy for all i = 1, …, 6, a fact we will prove in Section 4.1. The curves Cx and Cy are cut out by gx(u) = 0 and gy(v) = 0 in
In Section 4.2 we use classical invariant theory to derive the polynomials gx and gy.
Given seven point pairs
The maps κx, κy are not the only way to derive the epipolar curves Cx, Cy; it is also possible to obtain them via the trinity correspondence (16). This will be the subject of Subsection 4.1 and will allow us to prove the following result:
Theorem 4.2
For 7 semi-generic point pairs
This is the first of the two main results in this section and it is the more geometric theorem, to be proved at the end of Subsection 4.1. In Subsection 4.2.1 we use the theory of cubic surfaces as in [3] to obtain explicit equations for the epipolar curves. In Subsection 4.2.2 we use these explicit equations to characterize rank deficiency of Z7 using 14 algebraic equations and to prove our second main result, Theorem 4.11, which is the more algebraic theorem. Finally, in Section 4.3 we collect some further results outside the assumption of semi-genericity.
4.1 Rank drop and cubic curves
Before addressing the cases of six generic point pairs and seven semi-generic point pairs, we establish an analogue of Lemma 3.7 to show how general projective planes in ℙ(ℂ3×3) give rise to Cremona transformations of cubic curves.
Lemma 4.3
Let 𝓟 ⊂ ℙ(ℂ3×3) be a projective plane not containing any rank-one matrix. The set of points (x, y) ∈ ℙ2 × ℙ2 satisfying yT Mx = 0 for all M ∈ 𝓟 coincides with the closure of the graph {(x, f(x)) : x ∈
Proof
The curve
Let ℓ = span{M1, M2} ⊂ 𝓟 ⊂ ℙ(ℂ3×3) be a generic line. By Lemma 3.7, there is a Cremona transformation fℓ : ℙ2 ⇢ ℙ2 whose graph is the set of points (x, y) ∈ ℙ2 × ℙ2 satisfying yT Mx = 0 for all M ∈ ℓ. As in Remark 3.8, the map fℓ transforms x into ker
Note that the graph {(x, fℓ(x)) : x ∈
4.1.1 Six point pairs
Let
Since 𝓝Z is a two-dimensional plane, it contains a pencil of lines through F, see (14) and (16), which corresponds to a pencil of quadrics Qλ, each passing through the reconstruction. The intersection of these quadrics, also obtainable as the intersection of any two distinct quadrics in the pencil, is a quartic space curve W ⊂ ℙ3 that must also pass through the reconstruction. Since c1, c2 are on W, π1(W) ⊂
Lemma 4.4
For six generic point pairs
The cubic curves π1(W) and π2(W) are the right and left epipolar curves Cx, Cy, respectively; in particular, they are independent of the choice of F.
The points xi lie on Cx and the points yi lie on Cy for i = 1, …, 6.
There exists a two-parameter family of Cremona transformations fℓ :
fℓ(xi) = yi for i = 1, …, 6,
the restriction of fℓ to a map Cx → Cy is independent of ℓ, and
the base points of all the Cremona transformations fℓ lie in Cx, Cy.
Proof
Let F be a fundamental matrix in 𝓝Z. Since
The quartic space curve W is defined by quadrics of the form q(u) = π2(u)⊤ Mπ1(u) where M ∈ 𝓟 ∩ F⊥. Therefore π1(W) contains the cubic plane curve Cx defined by {x ∈ ℙ2 : ∃ M ∈ 𝓝Z such that Mx = 0}. Since c1 ∈ W, π1(W) is a cubic plane curve and so these must be equal. A symmetric argument shows that π2(W) = Cy. Since W contains each point pi, this also implies that xi = π1(pi) belongs to Cx and yi = π2(pi) belongs to Cy for i = 1, …, 6.
By Lemma 4.3, for any generic line ℓ ⊂ 𝓝Z the restriction of the Cremona transformation fℓ : ℙ2 ⇢ ℙ2 to the cubic Cx is independent of the choice of ℓ. By Theorem 3.16 we have fℓ(xi) = yi for all i. As in Lemma 3.9, the base points of fℓ are the right kernels of the three rank-two matrices F1, F2, F3 ∈ ℓ and therefore belong to Cx. Similarly, the base points of
Remark 4.5
Given a rank two matrix F ∈ 𝓝Z, it may be the case that Fxi = 0 (or
4.1.2 From six points to seven
The trinity correspondence has allowed us to prove a number of properties of the epipolar curves corresponding to six generic point pairs. In particular, we know that there is an isomorphism f : Cx → Cy that sends xi ↦ yi for i = 1, …, 6 which is induced by a two-parameter family of Cremona transformations
Lemma 4.6
Let
Proof
(⇒) Under semi-genericity, Z is rank deficient if and only if the nullspace of Z and the nullspaces of each of its 6 × 9 submatrices are identical. In particular, if Pi is the subset of 6 point pairs obtained by excluding the ith, then, using the notation from Theorem 3.16, 𝓛P1 = … = 𝓛P7. Applying Lemma 4.4, we find that the pairs of curves
(⇐) For this direction, we use Theorem 3.16. In particular, the existence of such a family of Cremona transformations implies that dim(𝓛P) = dim(𝓒P) = 2 as illustrated in (16). Since there is a two-dimensional family of lines ℓ in the projective nullspace of Z, we must have rank(Z) < 7. We now need to verify that C1 = Cx and C2 = Cy. It follows by Lemma 2.5 that the curves C1, C2 contain all possible base points of the Cremona transformations fℓ. Furthermore, by Lemma 3.9 the sets of all such base points in the domain and codomain is exactly the set of all possible right and left epipoles. It follows that Cx ⊂ C1 and Cy ⊂ C2 and therefore the curves are equal. □
Proof of Theorem 4.2
(⇒) This direction follows from Lemma 4.6. In particular, the isomorphism is exactly that obtained by restricting the family of Cremona transformations to the map Cx → Cy.
(⇐) Assume that such curves C1, C2 exist, as well as the desired isomorphism C1 → C2. By Lemma 2.7 there is a two-parameter family of Cremona transformations
4.2 The Cremona hexahedral form of Cx and Cy
In this subsection we return to the original characterization of the cubic curves Cx and Cy as the images under the quadratic maps κx and κy of the curve C as in (18). We will see that it is possible to derive explicit equations for these curves using the classical theory of cubic surfaces and a special invariant-theoretic representation of them called the Cremona hexahedral form. These ideas intersect substantially with the characterization of rank drop of Z6 in [3]; in particular, we draw on the connection between six generic points pairs
4.2.1 Six generic point pairs again
Suppose we have six generic point pairs
Therefore, C cuts each of the exceptional lines of the blowup in one point, and therefore the restrictions of κx, κy to C are isomorphisms.
For a set of six points u1, …, u6 ∈ ℙ2, set [ijk] := det[ui uj uk] and define
This is a classical invariant of u1, …, u6 under the action of PGL(3) whose vanishing expresses that the lines uiuj, ukul and urus meet in a point; compare [2, pp. 169]. Using these invariants, Coble [21, page 170] defines the following six scalars:
Coble also defines the following six cubic polynomials that vanish on u1, …, u6:
These cubic polynomials are covariants of u1, …, u6 under the action of PGL(3).
It is a well-known result in algebraic geometry that every smooth cubic surface is the blowup of six points in ℙ2. The blowup procedure furnishes an algorithm to find a determinantal representation of the surface. However, these representations do not directly reflect the six points that were blown up. The Cremona hexahedral form of a smooth cubic surface provides explicit equations for the surface in terms of the points being blown up. It consists of the following polynomials:
Furthermore, the cubic surface can also be parameterized by
We will now use the above facts to obtain explicit equations (that depend on
Definition 4.7
Given six point pairs
Given seven point pairs
The polynomials gx, gy played a prominent role in the rank drop of Z6 in [3].
Lemma 4.8
Given generic point pairs
The plane cubic curves Cx and Cy have defining equations gx(u) = 0 and gy(v) = 0 respectively.
The cubic curve C ≅ Sx ∩ Sy which has equations
The cubic curve Sx ∩ Sy is the image of Cx under the blowup of
Proof
We begin with the first item. By Lemma 4.4, xi ∈ Cx for all i and by Definition 4.7, gx(xi) = 0 for all i since the cubic polynomials in (21) vanish on the xi. For fixed i = 1, …, 6, consider the 5 point pairs left after excluding (xi, yi) and let (ui, vi) be the unique new point pair (cf. Lemma 6.1 in [3]) such that the configuration
is rank deficient. For convenience, we assume without loss of generality that i = 6. In other words, if Z6̂ =
To prove the second and third claims, recall that κx : C → Cx is an isomorphism. Let
By (23),
and since Cx is cut out by gx(u) = 0, we get that
Therefore, Sx ∩ Sy is exactly the image of Cx under the blowup of
Example 4.9
(Example 4.1, continued). One can verify that the polynomials (24) define the same cubic curves as those in Example 4.1. We then pick a specific point x7 = (0 : 1403 : 118) ∈ Cx. Using a computer algebra package, one can compute the unique point y7 = (1802855 : 1562942 : 171287) such that Z =
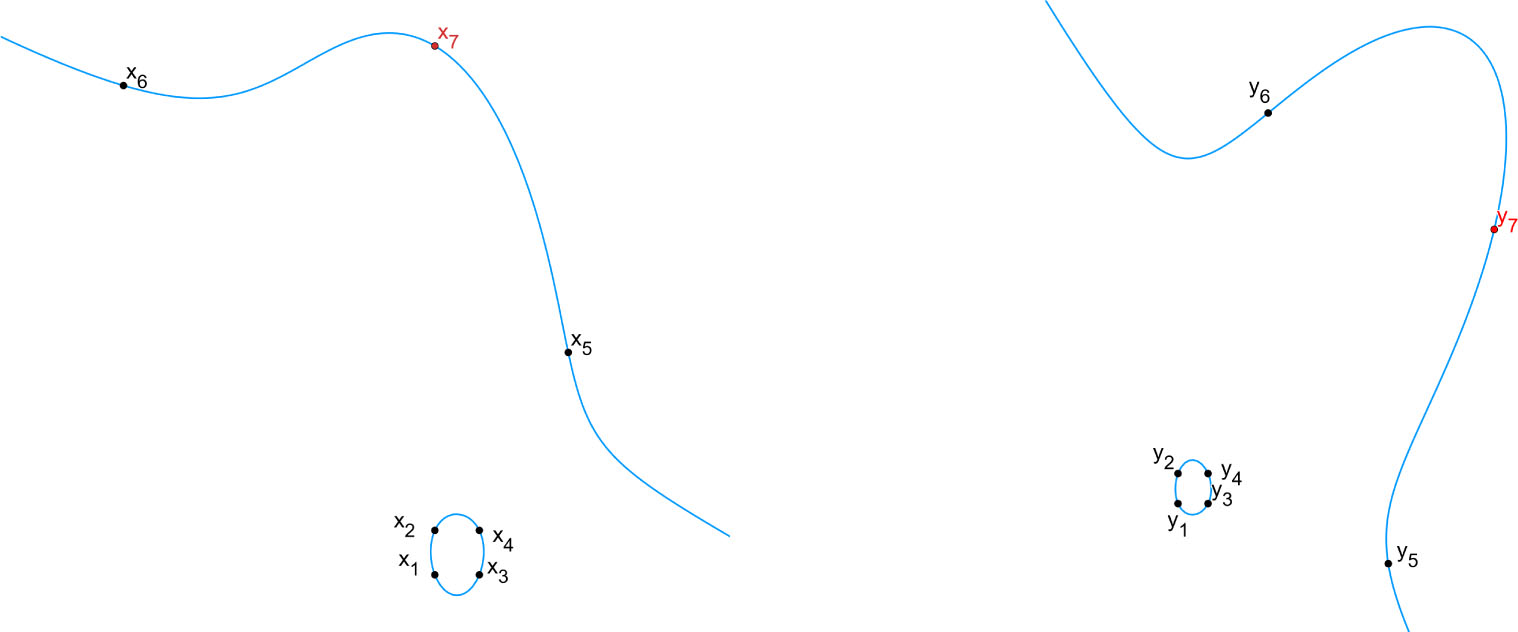
The cubic curves Cx and Cy, with x7 and y7 highlighted.
4.2.2 Algebraic conditions for the rank deficiency of Z7
We are now ready to present our main algebraic result for rank drop given k = 7 point pairs. We begin with a basic lemma that will connect all of our results in the main theorem.
Lemma 4.10
Let
Proof
By semi-genericity, Z is rank deficient if and only if 𝓝Z = 𝓝Z1̂ = … = 𝓝Z7̂ for each 6 × 9 submatrix Zî of Z. Since Cî = 𝓝Zî ∩ 𝓓, the matrix Z is rank deficient if and only if C = C1̂ = … = C7̂. □
The following theorem, which is the main result of this subsection, allows us to check for rank drop without computing Cremona transformations.
Theorem 4.11
For seven semi-generic point pairs
Z =
We have
We have
All seven cubic curves in
All seven cubic curves in
Proof
By Lemma 4.8, (2) is equivalent to (3). We next prove that (1) implies (4) and (5). If Z is rank deficient, then C1̂ = … = C7̂ by Lemma 4.10. Applying the quadratic maps κx and κy we obtain (4) and (5). To prove the reverse direction we will show (4) implies (1); the proof that (5) implies (1) is symmetric. In particular, we will show that
We now prove that (1) implies (2). Fix i ∈ {1, …, 7}. Then xj ∈
Finally, we prove that (2) implies (1). Since xj ∈
which can also be realized as the intersection of the cubic surface S with two planes. If 𝓝Z were one-dimensional, it would intersect 𝓓 in at most three points. Since we have found 4 > 3 distinct points in 𝓝Z ∩ 𝓓, 𝓝Z must have projective dimension ≥ 2, implying (1). □
4.3 Beyond semi-genericity
Given seven semi-generic point pairs
We begin by presenting two relatively simple, but highly degenerate, conditions for the rank deficiency of Z7. One of these conditions is that Z7 will be rank deficient if {xi} and {yi} are equal up to a change of coordinates.
Lemma 4.12
Suppose we have point pairs
Proof
Since rank drop is a projective invariant, we can assume xi = yi for all i. Then the equations
The second simple condition is that the rank of Z will drop if the points in either ℙ2 lie in a line.
Lemma 4.13
Suppose
Proof
Suppose the yi’s are on a line. Then we may assume that yi = (mi, 0, 1) after a change of coordinates. Then simple column operations on Z show that it is rank deficient. □
Remark 4.14
We note that the existence of such configurations does not necessarily imply that the rank drop variety is reducible. We suspect that these configurations are in the Zariski closure of the generic rank drop component.
It is simple to check that in both of the above cases we have
Lemma 4.15
If Z =
Proof
Let I be the ideal generated by the 14 polynomials
However, the converse does not hold in general. We present two examples of highly degenerate configurations where the 14 equations hold, but Z7 is not rank deficient.
Example 4.16
Take xi to be the columns of the matrix X and yi to be the columns of the matrix Y with
where x1, x2, x3, x4, x7 are on a line and x5 = x6. Similarly, y1, y2, y3, y5, y6 are on a line and y4 = y7. We can verify that
the latter of which has rank one.
Example 4.17
Take xi to be the columns of the matrix X and yi to be the columns of the matrix Y with
where
While the focus of this paper has been on the conditions under which Z drops rank, the tools we have developed have applications beyond rank drop. In particular, for a fully generic configuration of seven point pairs we can use the cubic curves
Lemma 4.18
Let
Proof
Consider the two cubic curves
Example 4.19
Take xi to be the columns of the matrix X and yi to be the columns of the matrix Y with
We can then construct the seven cubic curves
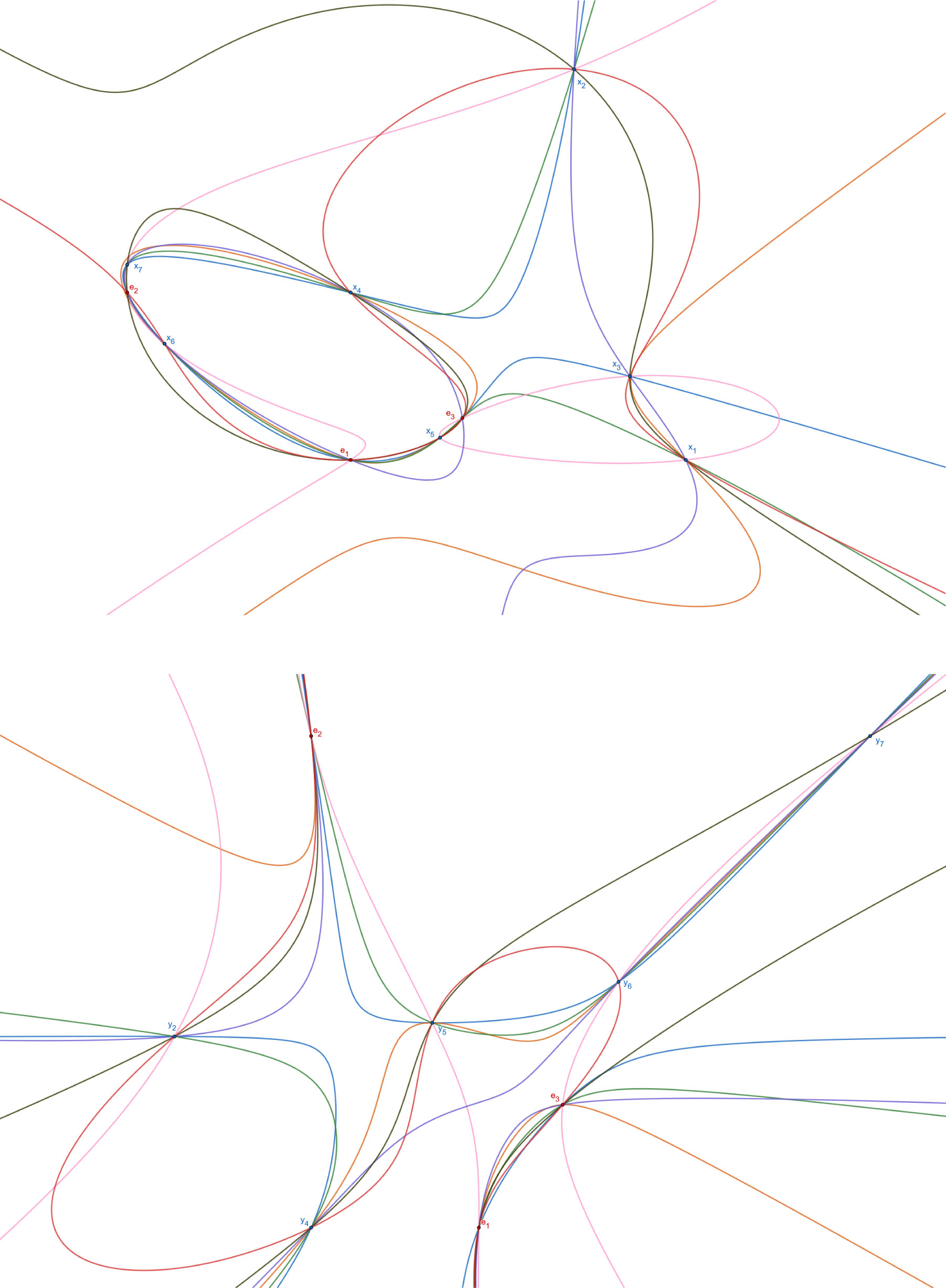
The cubic curves
and we can see that these are exactly the three common intersection points.
5 The case k = 9
We finish by characterizing the rank deficiency of Z =
Recall that if a, b are distinct points in ℙ2, then a × b ∈ ℙ2 is the normal of the line containing a and b, i.e., u ∈ Span{a, b} if and only if u⊤ (a × b) = 0. In what follows we let ℓab denote the line spanned by a, b. Its normal a × b = [a]× b where [a]× is the 3 × 3 skew symmetric matrix that expresses cross products with a as a matrix-vector multiplication.
Theorem 5.1
The matrix Z =
There exists a line ℓ ⊂
There are two points e ∈
There is some T ∈ PGL(3) such that yi lies on the line with normal vector Txi for each i.
Proof
The first statement is trivial. The matrix Z is rank deficient if and only if 𝓝Z ⊂ ℙ8 contains at least one point. Representing such a point by T ∈ ℙ(ℂ3×3) we have (
If rank(T) = 1, then T = uv⊤ for some u, v ∈ ℂ3. Therefore, (
Suppose that rank(T) = 2. Let e ∈
Pick any line ℓ not passing through e and suppose its normal is n. Then the projective transformation T [n]× is a ℙ1-homography that takes ℓe xi → ℓe′yi; see [6, Result 9.5]. Indeed, suppose the intersection of ℓ and ℓexi is ui. Since ui is orthogonal to both n and e × xi, we have ui ∼ n × (e × xi) = [n]× (e × xi). Since ui lies on ℓexi, we have ui = λ e + μ xi for some scalars λ, μ, and since ℓ does not contain e, we obtain ui ≠ e which implies that μ ≠ 0. Therefore
which says that the normal of ℓexi is mapped to Txi by T[n]×. We just need to argue that Txi is the normal of ℓe′yi to finish the proof. For this check that (e′)⊤ Txi = 0 since (e′)⊤ T = 0 and
If rank(T) = 3 then T is a homography (an invertible projective transformation). Then
Remark 5.2
In the proof of (2), if xi = e for some i then [e]× e = 0 and similarly, if yj = e′ for some j then [e′]× yj = 0. Therefore, the ℙ1-homography will not work for the indices i, j where xi = e or yj = e′.
Remark 5.3
As we saw, if seven of the nine points on either side are on a line then the rank of Z9 will drop. Condition (1) allows for the situations where s points with 3 ≤ s ≤ 6 on one side are on a line and the 9 − s complementary y points are on a line.
Example 5.4
Take xi to be the columns of the matrix X and yi to be the columns of the matrix Y with
One can check that all 8 × 9 submatrices of Z have rank 8. If the coordinates of ℙ2 are u1, u2, u3 then x1, …, x4 lie on the line u1 = 0 and y5, …, y9 lie on the line u2 = 0 and Z must drop rank by Condition (1). Indeed, the unique element in the nullspace of Z is the rank-one matrix
Take xi to be the columns of the matrix X and yi to be the columns of the matrix Y with
Again, Z and all its 8 × 9 submatrices have rank 8. The unique element in 𝓝Z is the rank-two matrix
The points e = e′ = (1, 1, 0)⊤ are generators of the right and left nullspaces of T. Note that x5 = e and y7 = e′. Pick ℓ̄ = (1, 2, 3)⊤. Then e⊤ ℓ̄ ≠ 0. Now check that [e′]× Y = (T [ℓ̄]×) [e]× X. Indeed,
except in the columns of X and Y where xi = e and yj = e′.
Here is another example where the epipoles do not appear among the xi’s or yj’s. Take xi to be the columns of the matrix X and yi to be the columns of the matrix Y with
The unique element in 𝓝Z is the rank-two matrix
The points e = (−1, 1, −2)⊤ and e′ = (1, 2, −1)⊤ generate the right and left nullspaces of T. Pick ℓ̄ = e. Then e⊤ e ≠ 0. Now check that [e′]× Y = (T [e]×) [e]× X. Indeed,
Take xi to be the columns of the matrix X and yi to be the columns of the matrix Y with
The unique element in 𝓝Z is the rank-three matrix
By construction,
6 Conclusion
In combination with [3], we now have a complete characterization of how rank deficiency of the matrix Z =
Corollary 6.1
Let
When k = 6, Z6 is rank deficient exactly when a reconstruction p1, …, p6, c1, c2 is a Cayley octad (eight points in the intersection of three generic quadrics).
When k = 7, Z7 is rank deficient exactly when the points p1, …, p7, c1, c2 of any reconstruction lie on a quartic curve that arises as the intersection of two quadrics.
When k = 8, Z8 is rank deficient exactly when the points p1, …, p8, c1, c2 of any reconstruction lie on a quadric.
Proof
When k = 8, the matrix Z8 is rank deficient exactly when 𝓝Z8 is a line. By the semi-genericity of the point pairs, this line is P-generic and does not contain any rank-one matrices. Any reconstruction of the point pairs corresponds to a fundamental matrix F on this line, and by Lemma 3.3 the reconstruction lies on a quadric. Similarly, if the point pairs have a reconstruction, given by some fundamental matrix F which lies on a quadric, then there is a corresponding line through F in 𝓝Z8 and Z8 is rank deficient.
When k = 7, Z7 is rank deficient exactly when 𝓝Z7 is a plane. Given any reconstruction p1, …, p7, c1, c2 of the point pairs, let F be the corresponding fundamental matrix. By semi-genericity of the point pairs, 𝓝Z7 is a generic plane that intersects 𝓓 in a curve C of rank-two matrices. If we take any two lines through F in 𝓝Z7 then as in Lemma 3.3 we obtain two quadrics Q1, Q2 whose intersection is a quartic curve through the reconstruction. Similarly, if any reconstruction corresponding to a fundamental matrix F′ lies on two distinct quadrics then there are two distinct lines through F′ in 𝓝Z7 and Z7 is rank deficient.
For k = 6, Z6 is rank deficient if and only if 𝓝Z6 is a 3-dimensional plane. Equivalently, every rank-two matrix F ∈ 𝓝Z6 lies on a net of lines in 𝓝Z6, which corresponds to a net of quadrics containing the reconstruction corresponding to F. It follows that if the reconstruction lies on a Cayley octad Q1 ∩ Q2 ∩ Q3 then Z6 is rank deficient. For the other direction, suppose that Z6 is rank deficient. Then the reconstruction lies on a net of quadrics Q1 ∩ Q2 ∩ Q3 and we need to show that this intersection contains exactly the 8 points
Funding statement: The third author was partially supported by NSF grant No. DMS-2153746.
Communicated by: D. Plaumann
References
[1] M. Bråtelund, Critical configurations for two projective views, a new approach. J. Symbolic Comput. 120 (2024), Paper No. 102226, 22 pages. MR4583113 Zbl 07725351Search in Google Scholar
[2] A. B. Coble, Point sets and allied Cremona groups. I. Trans. Amer. Math. Soc. 16 (1915), 155–198. MR1501008 Zbl 02618070Search in Google Scholar
[3] E. Connelly, S. Agarwal, A. Ergur, R. Thomas, The geometry of rank drop in a class of face-splitting matrix products: Part I. Adv. Geom. 24 (2024), 369–394.Search in Google Scholar
[4] J. Diller, Cremona transformations, surface automorphisms, and plane cubics. Michigan Math. J. 60 (2011), 409–440. MR2825269 Zbl 1244.14012Search in Google Scholar
[5] R. Hartley, F. Kahl, Critical configurations for projective reconstruction from multiple views. International Journal of Computer Vision 71 (2007), 5–47. Zbl 1477.68366Search in Google Scholar
[6] R. Hartley, A. Zisserman, Multiple view geometry in computer vision. Cambridge Univ. Press 2003. MR2059248 Zbl 1072.68104Search in Google Scholar
[7] H. L. Lee, On the existence of a projective reconstruction. Preprint 2020, arXiv:1608.05518Search in Google Scholar
[8] I. R. Shafarevich, Basic algebraic geometry 1. Springer 2013. MR3100243 Zbl 1273.14004Search in Google Scholar
© 2024 Walter de Gruyter GmbH, Berlin/Boston, Germany
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Frontmatter
- Automorphisms and opposition in spherical buildings of classical type
- Revisiting gradient conformal solitons
- Abelian branched covers of rational surfaces, II
- Annulus configurations in handlebody-knot exteriors
- Cones between the cones of positive semidefinite forms and sums of squares
- The geometry of rank drop in a class of face-splitting matrix products: Part I
- The geometry of rank drop in a class of face-splitting matrix products: Part II
- Triality and automorphisms of principal bundles moduli spaces
Articles in the same Issue
- Frontmatter
- Automorphisms and opposition in spherical buildings of classical type
- Revisiting gradient conformal solitons
- Abelian branched covers of rational surfaces, II
- Annulus configurations in handlebody-knot exteriors
- Cones between the cones of positive semidefinite forms and sums of squares
- The geometry of rank drop in a class of face-splitting matrix products: Part I
- The geometry of rank drop in a class of face-splitting matrix products: Part II
- Triality and automorphisms of principal bundles moduli spaces