Combination of Laplace transform and residual power series techniques to solve autonomous n-dimensional fractional nonlinear systems
-
Marwan Alquran
 ,
Maysa Alsukhour
,
Maysa Alsukhour

Abstract
In this work, a new iterative algorithm is presented to solve autonomous n-dimensional fractional nonlinear systems analytically. The suggested scheme is combination of two methods; the Laplace transform and the residual power series. The methodology of this algorithm is presented in details. For the accuracy and effectiveness purposes, two numerical examples are discussed. Finally, the impact of the fractional order acting on these autonomous systems is investigated using graphs and tables.
1 Introduction
Extending the ordinary-partial differential equations into fractional differential equations has been attracted by many researchers since the fractional derivatives are more general, applicable and more efficient for real world phenomena, especially when the dynamics of a given mathematical model is affected by constraints inherent to the system [1]. Since it is difficult to find explicit solutions to these fractional problems, it is necessary to use, alternative methods, numerical and approximate techniques.
The most popular numerical techniques for solving fractional problems are the Collocation methods whose basic functions are of types: Haar functions, Legendre wavelets, Bernoulli polynomials, B-spline functions, Chebyshev polynomials, and others [2, 3, 4, 5, 6]. On the other side, many effective analytical schemes were developed to treat nonlinear problems involving fractional derivatives, such schemes are: generalized power series [13, 16, 22, 23], residual power series method [17, 26, 27, 28, 29], differential transform method [19, 21, 24, 25], homotopy perturbation method [14, 15, 18, 20] and others.
In this work, we are interested in introducing a new analytical scheme to solve nonlinear fractional autonomous dynamical systems. Dynamical systems describe the prediction of future states follow from the current state. Different numerical and analytical algorithms were used to solve fractional dynamical systems, such as, Homotopy analysis method, the variational iteration method, Ritz method and the explicit one-step method [7, 8, 9, 10]. In this context, we present a new algorithm constructed by combining the Laplace transform method and the residual power series method (LRPS). This new technique has been recently proposed for the first time in [11] and used in [12].
The organization of the paper is the following: In Section 2 we present the steps of applying the LRPS method to solve n × n autonomous fractional dynamical systems. In Section 3 we study two examples of order 2 × 2 and 3 × 3, and also provide graphical analysis. Finally, the conclusion is given in Section 4.
2 Description of LRPS
In this section, we present in details the steps of applying the LRPS scheme in solving the following autonomous fractional system:
subject to the initial conditions
where 0 < α ≤ 1, 0 ≤ t ≤ 1, hm are suitable functions, and
Applying the Laplace transform to (1) we get
where
We assume that Vm(s), m = 1, 2, 3, . . ., n have fractional power series representation, i.e.,
Next, we let
By condition (2), the 0-th LRPS approximate solution of Vm(s) is
Now, we define the Laplace residual function and the k-th Laplace residual function to (3), respectively, as:
To determine the coefficients cmr, m = 1, 2, 3, . . ., n and r = 1, 2, 3, . . ., k, we substitute (6) into (8), then multiply the resulting equation by skα+1, and next we solve the following iterative equation
for the unknowns cmr : k = 1, 2, 3, .... Finally, we apply the Laplace inverse to
3 Numerical Problems and concluding remarks
In this section we present two examples of fractional nonlinear autonomous systems of order 2 × 2 and 3 × 3. The steps of implementing the LRPS will be clarified, and the effectiveness of the proposed method will be tested by providing a graphical analysis.
3.1 Example 1
Consider the following 2×2 nonlinear autonomous system [7, 8]
subject to
Applying the Laplace transform to (10)–(11), we get
We assume that both V1(s) and V2(s) have fractional power series representation as
and we assume that the k-th truncated series of V1(s) and V2(s) are
It is clear that the Laplace residual function for both
Accordingly, the k-th Laplace residual functions, LResk, are
To determine a1 and b1, we consider
As
Multiply (18) by sα+1, we obtain that
Finally, we solve the following system
which gives that
In a similar manner, to find a2 and b2, we consider
As
Multiply (23) by s2α+1, and then solve
we deduce that
Hence, the 2nd-approximate LRPS solution of
Proceeding as the above illustrated steps in determining the unknown functions ak and bk, one can easily reach the following results:
and
Therefore,
Consequently, the solution of (10)–(11) is
We point out that the exact solutions to the system in Example 1 for the case of α = 1 are
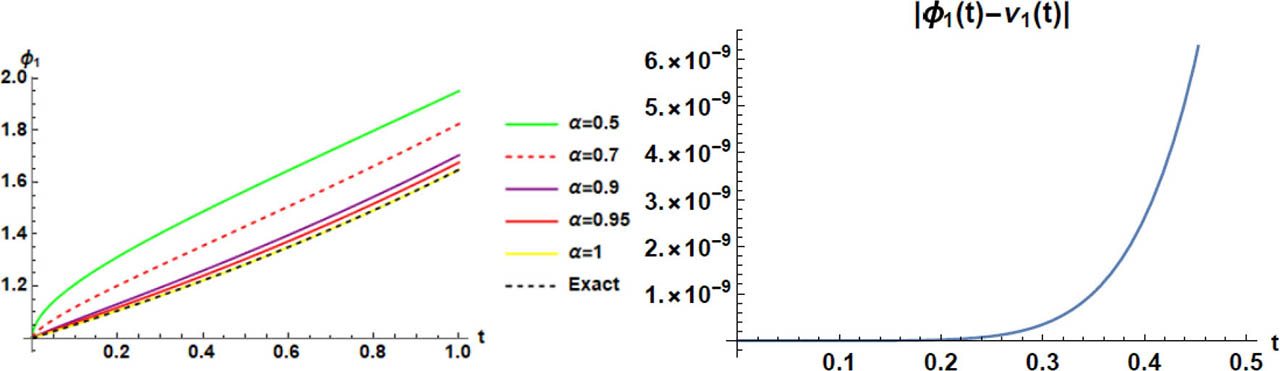
Exact, profile approximate solutions and absolute error regarding ν1 of Example 1.
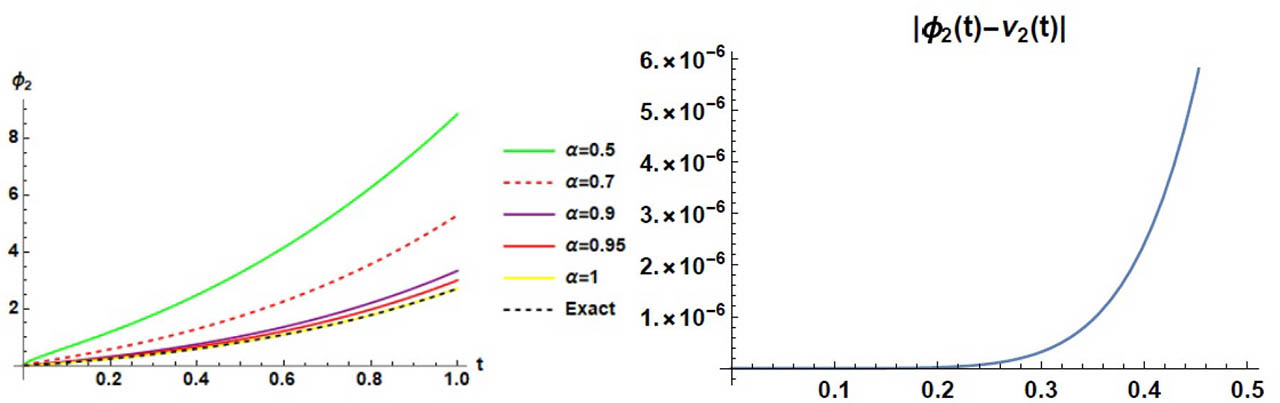
Exact, profile approximate solutions and absolute error regarding ν2 of Example 1.
On the other side, as shown in Table 1, we provide numerical investigations on the accuracy of LRPS applied to Example 1. While as, in Table 2, we present the impact of the fractional order α acting on the values of the unknowns field functions νi(t) : i = 1, 2.
Numerical values of φ1(t) and φ2(t) for α = 0.5, 0.7, 0.9 to Example 1.
| t | α = 0.5 | α = 0.7 | α = 0.9 | |||
|---|---|---|---|---|---|---|
| ν1(t) | ν2(t) | ν1(t) | ν2(t) | ν1(t) | ν2(t) | |
| 0.2 | 1.312141902 | 1.184140706 | 1.201599157 | 0.580240824 | 1.130764596 | 0.320222598 |
| 0.4 | 1.486564677 | 2.444376604 | 1.354985531 | 1.290827616 | 1.259270690 | 0.756805142 |
| 0.6 | 1.6445934256 | 4.006862318 | 1.506375497 | 2.249749087 | 1.396080779 | 1.365217628 |
| 0.8 | 1.7972927210 | 5.900827955 | 1.661915587 | 3.516856974 | 1.543797927 | 2.198213783 |
Absolute errors: |φ1(t) − ν1(t)| and |φ2(t) − ν2(t)| to Example 1.
| t | |φ1(t) − ν1(t)| | |φ2(t) − ν2(t)| |
|---|---|---|
| 0.2 | 1.408981153×10−9 | 5.516320339×10−7 |
| 0.4 | 9.149350321×10−8 | 3.65457231×10−5 |
| 0.6 | 1.057576003×10−6 | 4.31280234×10−4 |
| 0.8 | 6.030974603×10−6 | 2.51274279×10−3 |
3.2 Example 2
Let us consider the following 3 × 3 nonlinear autonomous system [9, 10]
subject to
Apply the Laplace transform to (31)–(32), we get
Assume that V1(s), V2(s) and V3(s) have fractional power series as
with the k-th truncated series
whose the Laplace residual functions for
Accordingly, the k-th Laplace residual functions, LResk, are
To determine a1, b1 and c1, we substitute (35) in (37) with k = 1 to get
Multiply (38) by sα+1,
It is clear that when we solve
Similarly, when we substitute (35) in (37) with k = 2 and then use the fact that
Hence, the 2nd-approximate LRPS solution of
Proceeding as the above illustrated steps in determining the unknown functions ak, bk and ck, one can easily verify the following results:
Therefore,
Consequently, the solution of (31)–(32) is
It is worth mentioning that the exact solutions to the system in Example 2 for the case α = 1 are ν1(t) = et, ν2(t) = e2t and ν3(t) = e3t − 1 [9, 10]. We consider
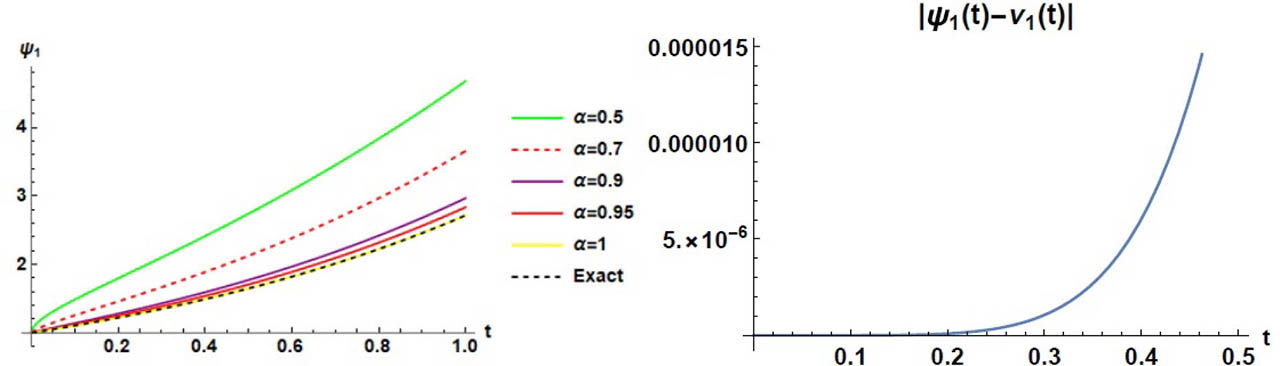
Exact, profile approximate solutions and absolute error regarding ν1 of Example 2.
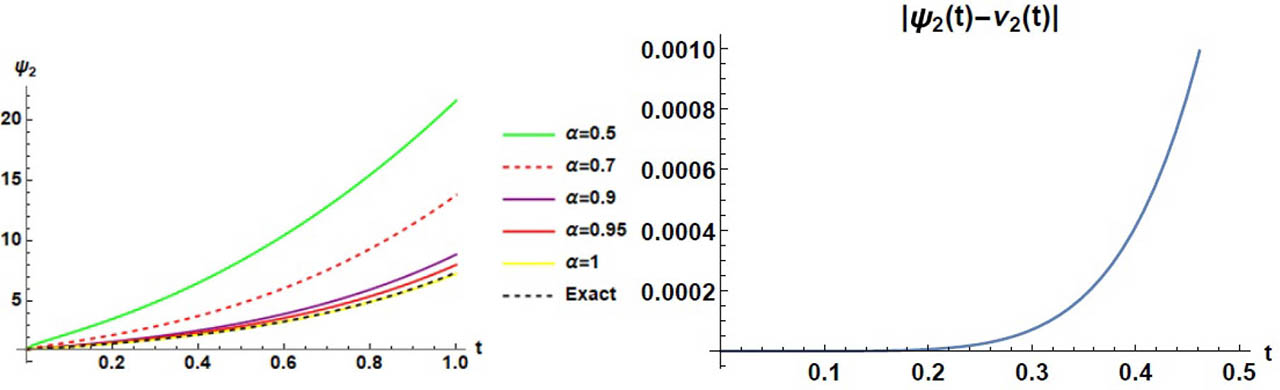
Exact, profile approximate solutions and absolute error regarding ν2 of Example 2.
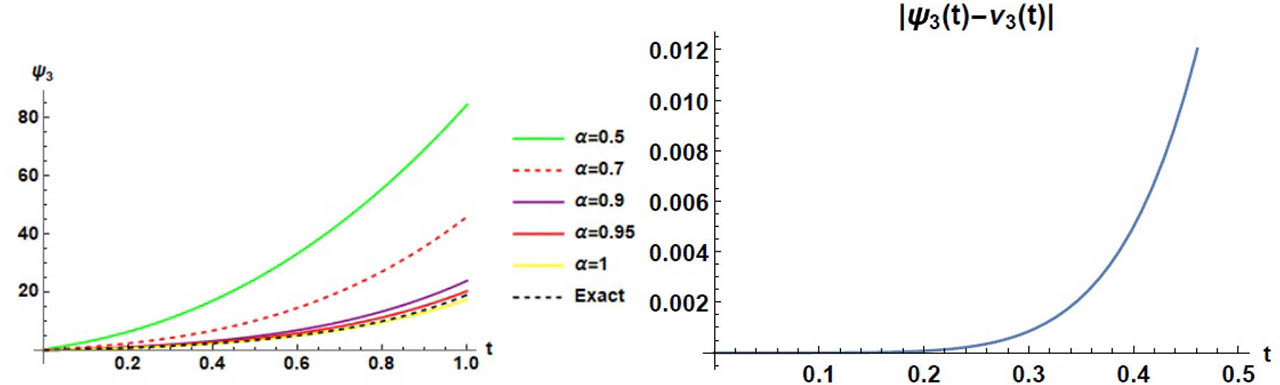
Exact, profile approximate solutions and absolute error regarding ν3 of Example 2.
Absolute errors: |ψ1(t) − ν1(t)|, |ψ2(t) − ν2(t)| and |ψ3(t) − ν3(t)| to Example 2.
| t | |ψ1(t) − ν1(t)| | |ψ2(t) − ν2(t)| | |ψ3(t) − ν3(t)| |
|---|---|---|---|
| 0.2 | 9.149350315×10−8 | 6.030974603×10−6 | 7.080039050 ×10−5 |
| 0.4 | 6.030974603×10−6 | 4.102618258×10−4 | 4.980922736 ×10−3 |
| 0.6 | 7.080039050×10−5 | 4.980922736×10−3 | 6.278346441 ×10−2 |
| 0.8 | 4.102618258×10−4 | 2.991775772×10−2 | 3.932243806 ×10−1 |
4 Conclusion
A combination of two schemes; the Laplace transform and the residual power series, is adapted to solve nonlinear Caputo-fractional autonomous dynamical systems. The methodology, reliability and the accuracy of the new technique are introduced by solving 2 × 2 and 3 × 3 systems. The role of the fractional derivative is investigated by using graphical analysis. Finally, the advantage of the current method was depicted as converting the whole fractional problem into pure algebraic computational scheme which can be executed using any available computational softwares.
As a future work, the authors plan to extend the use of LRPS to solve multi-dimensional various fractional problems arising in Engineering and Science.
Funding information: The authors state no funding involved.
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
Conflict of interest: The authors state no conflict of interest.
References
[1] Almeida R, Guzowska M, Odzijewicz T. A remark on local fractional calculus and ordinary derivatives. Open Math. 2016;14:1122–1124.10.1515/math-2016-0104Search in Google Scholar
[2] Razzaghi M, Ordokhani Y. Solution of nonlinear Volterra- Hammerstein integral equations via rationalized Haar functions. Mathe. Probl. Eng. 2001;7(2):205–219.10.1155/S1024123X01001612Search in Google Scholar
[3] Owolabi KM, Hammouch Z. Spatiotemporal patterns in the Belousov-Zhabotinskii reaction systems with Atangana-Baleanu fractional order derivative. Phys. A: Stat. Mech. Appl. 2019;523:1072–1090.10.1016/j.physa.2019.04.017Search in Google Scholar
[4] Keshavarz E, Ordokhani Y, Razzaghi M. A numerical solution for fractional optimal control problems via Bernoulli polynomials. J. Vib. Control. 2016;22(18):3889–3903.10.1177/1077546314567181Search in Google Scholar
[5] Ejlali N, Hosseini SM, Yousefi SA. B-spline spectral method for constrained fractional optimal control problems. Mathe. Methods Appl. Sci. 2018;41(14):5466–5480.10.1002/mma.5090Search in Google Scholar
[6] Ganji RM, Jafari H. A new approach for solving nonlinear Volterra integro-differential equations with Mittag-Leffler kernel. Proc. Inst. Mathe. Mech. 2020;46(1):144–158.10.29228/proc.24Search in Google Scholar
[7] Jafari H, Firoozjaee MA, Johnston SJ. An effective approach to solve a system fractional differential equations. Alexandria Engineering Journal. 2020;59(5):3213–3219.10.1016/j.aej.2020.08.015Search in Google Scholar
[8] Dixit S, Singh O, Kumar S. An analytic algorithm for solving system of fractional differential equations. Journal of Modern Methods in Numerical Mathematics. 2010;1(1):12–26.10.20454/jmmnm.2010.25Search in Google Scholar
[9] Zurigat M, Momani S, Odibat Z, Alawneh A. The homotopy analysis method for handling systems of fractional differential equations. Applied Mathematical Modelling. 2010;34(1):24–35.10.1016/j.apm.2009.03.024Search in Google Scholar
[10] Wu XY, Xia JL. Two low accuracy methods for stiff systems. Applied mathematics and computation. 2001;123(2):141–153.10.1016/S0096-3003(00)00010-2Search in Google Scholar
[11] Eriqat T, El-Ajou A, Oqielat MN, Al-Zhour Z, Momani S. A new attractive analytic approach for solutions of linear and nonlinear Neutral fractional Pantograph equations. Chaos, Solitons & Fractals. 2020;138:109957.10.1016/j.chaos.2020.109957Search in Google Scholar
[12] Alquran M, Ali M, Alsukhour M, Jaradat I. Promoted residual power series technique with Laplace transform to solve some time-fractional problems arising in physics. Results in Physics. 2020;19:103667.10.1016/j.rinp.2020.103667Search in Google Scholar
[13] Ali M, Alquran M, Jaradat I. Asymptotic-sequentially solution style for the generalized Caputo time-fractional Newell-Whitehead-Segel system. Advances in Difference Equations. 2019;2019:70.10.1186/s13662-019-2021-8Search in Google Scholar
[14] Dehghan M, Manafian J, Saadatmandi A. Solving nonlinear fractional partial differential equations using the homotopy analysis method. Numerical Methods for Partial Differential Equations. 2010;26:448–479.10.1002/num.20460Search in Google Scholar
[15] Ganjiani M. Solution of nonlinear fractional differential equations using Homotopy analysis method. Appl. Math. Model. 2010;34:1634–1641.10.1016/j.apm.2009.09.011Search in Google Scholar
[16] Alquran M, Jaradat I. Delay-asymptotic solutions for the time-fractional delay-type wave equation. Physica A: Statistical Mechanics and its Applications. 2019;527:121275.10.1016/j.physa.2019.121275Search in Google Scholar
[17] Alquran M. Analytical solution of time-fractional two-component evolutionary system of order 2 by residual power series method. Journal of Applied Analysis and Computation. 2015;5(4):589–599.10.11948/2015046Search in Google Scholar
[18] He JH. Homotopy perturbation method: a new nonlinear analytical technique. Appl. Math. Comput. 2003;135:73–79.10.1016/S0096-3003(01)00312-5Search in Google Scholar
[19] Ali M, Alquran M, Jaradat I, Abu Afouna N, Baleanu D. Dynamics of integer-fractional time-derivative for the new two-mode Kuramoto-Sivashinsky model. Rom. Rep. Phys. 2020;72(1):103.Search in Google Scholar
[20] Alquran M, Jaradat I, Momani S, Baleanu D. Chaotic and soli-tonic solutions for a new time-fractional two-mode Kortewegde Vries equation. Rom. Rep. Phys. 2020;72(3):117.Search in Google Scholar
[21] Abu Irwaq I, Alquran M, Jaradat I, Noorani MSM, Momani S, Baleanu D. Numerical investigations on the physical dynamics of the coupled fractional Boussinesq-Burgers system. Romanian Journal of Physics. 2020;65(5–6):111.Search in Google Scholar
[22] Jaradat I, Al-Dolat M, Al-Zoubi K, Alquran M. Theory and applications of a more general form for fractional power series expansion. Chaos Solitons Fract. 2018;108:107–110.10.1016/j.chaos.2018.01.039Search in Google Scholar
[23] Jaradat I, Alquran M, Al-Dolat M. Analytic solution of homogeneous time-invariant fractional IVP. Adv. Differ. Equ. 2018;2018:143.10.1186/s13662-018-1601-3Search in Google Scholar
[24] Abu Irwaq I, Alquran M, Ali M, Jaradat I, Noorani MSM. Attractive new fractional-integer power series method for solving singulary perturbed differential equations involving mixed fractional and integer derivatives. Results in Physic. 2021;20:103780.10.1016/j.rinp.2020.103780Search in Google Scholar
[25] Jaradat I, Alquran M, Abdel-Muhsen R. An analytical framework of 2D diffusion, wave-like, telegraph, and Burgers’ models with twofold Caputo derivatives ordering. Nonlinear Dynamics. 2018;93(4):1911–1922.10.1007/s11071-018-4297-8Search in Google Scholar
[26] Alquran M, Al-Khaled K, Sivasundaram S, Jaradat HM. Mathematical and numerical study of existence of bifurcations of the generalized fractional Burgers-Huxley equation. Nonlinear Studies. 2017;24(1):235–244.Search in Google Scholar
[27] El-Ajou A, Abu Arqub O, Al-Smadi M. A general form of the generalized Taylor's formula with some applications. Appl. Math. Comput. 2015;256:851–859.10.1016/j.amc.2015.01.034Search in Google Scholar
[28] Komashynska I, Al-Smadi M, Abu Arqub O, Momani S. An efficient analytical method for solving singular initial value problems of nonlinear systems. Appl. Math. Inf. Sci. 2016;10(2):647–656.10.18576/amis/100224Search in Google Scholar
[29] Alquran M, Yousef F, Alquran F, Sulaiman TA, Yusuf A. Dualwave solutions for the quadratic-cubic conformable-Caputo time-fractional Klein-Fock-Gordon equation. Mathematics and Computers in Simulation. 2021;185:62–76.10.1016/j.matcom.2020.12.014Search in Google Scholar
© 2021 Marwan Alquran et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Nonlinear absolute sea-level patterns in the long-term-trend tide gauges of the East Coast of North America
- Insight into the significance of Joule dissipation, thermal jump and partial slip: Dynamics of unsteady ethelene glycol conveying graphene nanoparticles through porous medium
- Numerical results for influence the flow of MHD nanofluids on heat and mass transfer past a stretched surface
- A novel approach on micropolar fluid flow in a porous channel with high mass transfer via wavelet frames
- On the exact and numerical solutions to a new (2 + 1)-dimensional Korteweg-de Vries equation with conformable derivative
- On free vibration of laminated skew sandwich plates: A finite element analysis
- Numerical simulations of stochastic conformable space–time fractional Korteweg-de Vries and Benjamin–Bona–Mahony equations
- Dynamical aspects of smoking model with cravings to smoke
- Analysis of the ROA of an anaerobic digestion process via data-driven Koopman operator
- Lie symmetry analysis, optimal system, and new exact solutions of a (3 + 1) dimensional nonlinear evolution equation
- Extraction of optical solitons in birefringent fibers for Biswas-Arshed equation via extended trial equation method
- Numerical study of radiative non-Darcy nanofluid flow over a stretching sheet with a convective Nield conditions and energy activation
- A fractional study of generalized Oldroyd-B fluid with ramped conditions via local & non-local kernels
- Analytical and numerical treatment to the (2+1)-dimensional Date-Jimbo-Kashiwara-Miwa equation
- Gyrotactic microorganism and bio-convection during flow of Prandtl-Eyring nanomaterial
- Insight into the significance of ramped wall temperature and ramped surface concentration: The case of Casson fluid flow on an inclined Riga plate with heat absorption and chemical reaction
- Dynamical behavior of fractionalized simply supported beam: An application of fractional operators to Bernoulli-Euler theory
- Mechanical performance of aerated concrete and its bonding performance with glass fiber grille
- Impact of temperature dependent viscosity and thermal conductivity on MHD blood flow through a stretching surface with ohmic effect and chemical reaction
- Computational and traveling wave analysis of Tzitzéica and Dodd-Bullough-Mikhailov equations: An exact and analytical study
- Combination of Laplace transform and residual power series techniques to solve autonomous n-dimensional fractional nonlinear systems
- Investigating the effects of sudden column removal in steel structures
- Investigation of thermo-elastic characteristics in functionally graded rotating disk using finite element method
- New Aspects of Bloch Model Associated with Fractal Fractional Derivatives
- Magnetized couple stress fluid flow past a vertical cylinder under thermal radiation and viscous dissipation effects
- New Soliton Solutions for the Higher-Dimensional Non-Local Ito Equation
- Role of shallow water waves generated by modified Camassa-Holm equation: A comparative analysis for traveling wave solutions
- Study on vibration monitoring and anti-vibration of overhead transmission line
- Vibration signal diagnosis and analysis of rotating machine by utilizing cloud computing
- Hybrid of differential quadrature and sub-gradients methods for solving the system of Eikonal equations
- Developing a model to determine the number of vehicles lane changing on freeways by Brownian motion method
- Finite element method for stress and strain analysis of FGM hollow cylinder under effect of temperature profiles and inhomogeneity parameter
- Novel solitons solutions of two different nonlinear PDEs appear in engineering and physics
- Optimum research on the temperature of the ship stern-shaft mechanical seal end faces based on finite element coupled analysis
- Numerical and experimental analysis of the cavitation and study of flow characteristics in ball valve
- Role of distinct buffers for maintaining urban-fringes and controlling urbanization: A case study through ANOVA and SPSS
- Significance of magnetic field and chemical reaction on the natural convective flow of hybrid nanofluid by a sphere with viscous dissipation: A statistical approach
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications
- Research on vibration monitoring and fault diagnosis of rotating machinery based on internet of things technology
- An improved image processing algorithm for automatic defect inspection in TFT-LCD TCON
- Research on speed sensor fusion of urban rail transit train speed ranging based on deep learning
- A Generalized ML-Hyers-Ulam Stability of Quadratic Fractional Integral Equation
- Study on vibration and noise influence for optimization of garden mower
- Relay vibration protection simulation experimental platform based on signal reconstruction of MATLAB software
- Research on online calibration of lidar and camera for intelligent connected vehicles based on depth-edge matching
- Study on fault identification of mechanical dynamic nonlinear transmission system
- Research on logistics management layout optimization and real-time application based on nonlinear programming
- Complex circuit simulation and nonlinear characteristics analysis of GaN power switching device
- Seismic nonlinear vibration control algorithm for high-rise buildings
- Parameter simulation of multidimensional urban landscape design based on nonlinear theory
- Research on frequency parameter detection of frequency shifted track circuit based on nonlinear algorithm
Articles in the same Issue
- Nonlinear absolute sea-level patterns in the long-term-trend tide gauges of the East Coast of North America
- Insight into the significance of Joule dissipation, thermal jump and partial slip: Dynamics of unsteady ethelene glycol conveying graphene nanoparticles through porous medium
- Numerical results for influence the flow of MHD nanofluids on heat and mass transfer past a stretched surface
- A novel approach on micropolar fluid flow in a porous channel with high mass transfer via wavelet frames
- On the exact and numerical solutions to a new (2 + 1)-dimensional Korteweg-de Vries equation with conformable derivative
- On free vibration of laminated skew sandwich plates: A finite element analysis
- Numerical simulations of stochastic conformable space–time fractional Korteweg-de Vries and Benjamin–Bona–Mahony equations
- Dynamical aspects of smoking model with cravings to smoke
- Analysis of the ROA of an anaerobic digestion process via data-driven Koopman operator
- Lie symmetry analysis, optimal system, and new exact solutions of a (3 + 1) dimensional nonlinear evolution equation
- Extraction of optical solitons in birefringent fibers for Biswas-Arshed equation via extended trial equation method
- Numerical study of radiative non-Darcy nanofluid flow over a stretching sheet with a convective Nield conditions and energy activation
- A fractional study of generalized Oldroyd-B fluid with ramped conditions via local & non-local kernels
- Analytical and numerical treatment to the (2+1)-dimensional Date-Jimbo-Kashiwara-Miwa equation
- Gyrotactic microorganism and bio-convection during flow of Prandtl-Eyring nanomaterial
- Insight into the significance of ramped wall temperature and ramped surface concentration: The case of Casson fluid flow on an inclined Riga plate with heat absorption and chemical reaction
- Dynamical behavior of fractionalized simply supported beam: An application of fractional operators to Bernoulli-Euler theory
- Mechanical performance of aerated concrete and its bonding performance with glass fiber grille
- Impact of temperature dependent viscosity and thermal conductivity on MHD blood flow through a stretching surface with ohmic effect and chemical reaction
- Computational and traveling wave analysis of Tzitzéica and Dodd-Bullough-Mikhailov equations: An exact and analytical study
- Combination of Laplace transform and residual power series techniques to solve autonomous n-dimensional fractional nonlinear systems
- Investigating the effects of sudden column removal in steel structures
- Investigation of thermo-elastic characteristics in functionally graded rotating disk using finite element method
- New Aspects of Bloch Model Associated with Fractal Fractional Derivatives
- Magnetized couple stress fluid flow past a vertical cylinder under thermal radiation and viscous dissipation effects
- New Soliton Solutions for the Higher-Dimensional Non-Local Ito Equation
- Role of shallow water waves generated by modified Camassa-Holm equation: A comparative analysis for traveling wave solutions
- Study on vibration monitoring and anti-vibration of overhead transmission line
- Vibration signal diagnosis and analysis of rotating machine by utilizing cloud computing
- Hybrid of differential quadrature and sub-gradients methods for solving the system of Eikonal equations
- Developing a model to determine the number of vehicles lane changing on freeways by Brownian motion method
- Finite element method for stress and strain analysis of FGM hollow cylinder under effect of temperature profiles and inhomogeneity parameter
- Novel solitons solutions of two different nonlinear PDEs appear in engineering and physics
- Optimum research on the temperature of the ship stern-shaft mechanical seal end faces based on finite element coupled analysis
- Numerical and experimental analysis of the cavitation and study of flow characteristics in ball valve
- Role of distinct buffers for maintaining urban-fringes and controlling urbanization: A case study through ANOVA and SPSS
- Significance of magnetic field and chemical reaction on the natural convective flow of hybrid nanofluid by a sphere with viscous dissipation: A statistical approach
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications
- Research on vibration monitoring and fault diagnosis of rotating machinery based on internet of things technology
- An improved image processing algorithm for automatic defect inspection in TFT-LCD TCON
- Research on speed sensor fusion of urban rail transit train speed ranging based on deep learning
- A Generalized ML-Hyers-Ulam Stability of Quadratic Fractional Integral Equation
- Study on vibration and noise influence for optimization of garden mower
- Relay vibration protection simulation experimental platform based on signal reconstruction of MATLAB software
- Research on online calibration of lidar and camera for intelligent connected vehicles based on depth-edge matching
- Study on fault identification of mechanical dynamic nonlinear transmission system
- Research on logistics management layout optimization and real-time application based on nonlinear programming
- Complex circuit simulation and nonlinear characteristics analysis of GaN power switching device
- Seismic nonlinear vibration control algorithm for high-rise buildings
- Parameter simulation of multidimensional urban landscape design based on nonlinear theory
- Research on frequency parameter detection of frequency shifted track circuit based on nonlinear algorithm