Lie Symmetries and Similarity Solutions for Rotating Shallow Water
-
Andronikos Paliathanasis



Abstract
We study a nonlinear system of partial differential equations that describe rotating shallow water with an arbitrary constant polytropic index γ for the fluid. In our analysis, we apply the theory of symmetries for differential equations, and we determine that the system of our study is invariant under a five-dimensional Lie algebra. The admitted Lie symmetries form the
1 Introduction
Lie symmetries are an essential tool for the study of nonlinear differential equations. The main characteristic of the Lie symmetry analysis is that invariant surfaces, in the space where the parameters of the nonlinear differential equation evolve, are determined, which can be used to perform an extended analysis of the nonlinear differential equation [1], [2], [3], [4], [5], [6], [7], construct conservation laws [8], [9], [10], and when it is feasible to determine solutions of the differential equation [11], [12], [13], [14]. In applied mathematics Lie symmetries cover a wide range of applications from physics, biology, financial mathematics, and many others (for instance, see [15], [16], [17], [18], [19], [20], [21], [22], [23], [24], [25], [26], [27], [28] and references therein).
In this work, we are interested on the application of Lie’s theory on a system of partial differential equations (PDEs) describing one-dimensional rotating shallow water phenomena. The system of our consideration expressed in Lagrangian coordinates is [29]:
where
The application of Lie symmetries in shallow-water theory is not new. Indeed, there are various studies in the literature [33], [34], [35], [36], [37], [38] that has provided important results with special physical interest. Recently, a detailed study of the nonlocal symmetries for a variable coefficient shallow water equation was performed in [39]. However, the majority of these studies are for the case where the fluid has a specific polytropic exponent γ, or the shallow water equations describe nonrotating phenomena. The plan of the article is as follows: In Section 2, we present the basic properties and definitions of Lie symmetry analysis, which is the main mathematical tool for our analysis. The main results of this work are presented in Section 3. More specifically, we reduce the system (1–3) into two equations for the variables h and v. We derive that the latter system of two PDEs admits five Lie point symmetries, and we study all the possible reductions in ordinary differential equations (ODEs) with the use of zero-order Lie invariants. We find that the reduced systems can be solved explicitly, and we derive the algebraic solution or closed-form solutions for every possible reduction and every value of the parameter γ. The latter result is important because it shows how powerful the method of Lie symmetry analysis is for the study of shallow-water phenomena to prove the existence of solutions for the model of our study. Emphasis is given on the travel-wave and scaling solutions. Finally, our discussion and conclusions are presented in Section 4.
2 Preliminaries
In this section, we briefly discuss the basic definitions and main steps for the determination of Lie point symmetries for differential equations.
Consider a system of PDEs
where uAdenotes the dependent variables, yi are the independent variables, and
We assume the one-parameter point transformation (1PPT) in the space of the independent and dependent variables:
in which ε is an infinitesimal parameter; the differential equation (4) remains invariant if and only if
or equivalently [12]
The latter conditions is expressed
where ℒ denotes the Lie derivative with respect the vector field
with generator
and
When condition (9) is satisfied for a specific 1PPT, the vector field X is called a Lie point symmetry for the system of PDEs (4). For an unknown 1PPT, in order to specify the generators X, which are Lie point symmetries for a given differential equation, from the symmetry condition (9), we specify a system of PDEs with dependent variables in the components of the generator X. The solution of the latter system provides the generic symmetry vector, and the number of independent solutions gives the number of independent vector field and the dimension of the admitted Lie algebra.
3 Lie Symmetry Analysis
We write the system (1–3) as two second-order PDEs:
while the application of Lie’s theory provides a five-dimensional Lie algebra consists by the following vector fields:
In Table 1, the commutators of the Lie symmetries are presented. Consequently, from Table 1, we can refer that the admitted Lie algebra is the
Commutators of the admitted Lie point symmetries by system (13, 14).
| X1 | X2 | X3 | X4 | X5 | |
|---|---|---|---|---|---|
| X1 | 0 | 0 | X3 | 0 | |
| X2 | 0 | 0 | 0 | 0 | |
| X3 | X4 | 0 | 0 | 0 | |
| X4 | 0 | 0 | 0 | ||
| X5 | 0 | 0 |
In order to continue with the application of the Lie point symmetries, it is important to determine the one-dimensional optimal system and invariants [44]. In order to do that, the adjoint representations should be calculated. By definition, for every basis of the Lie symmetries Xi, the adjoint representation is given by the following expression:
For the admitted Lie point symmetries of the system (13, 14), the adjoint representation is given in Table 2. In order to find the optimal system, we consider the generic symmetry vector:
Adjoint representation for the Lie point symmetries of the system (13, 14).
| X1 | X2 | X3 | X4 | X5 | |
|---|---|---|---|---|---|
| X1 | X1 | X2 | X5 | ||
| X2 | X1 | X2 | X3 | X4 | |
| X3 | X2 | X3 | X4 | ||
| X4 | X2 | X3 | X4 | ||
| X5 | X1 | X5 |
and we find the equivalent vectors by considering the adjoint representation. At this point, it is important to mention that the adjoint action admits two invariant functions, the
Case 1: For
becomes
for specific values of the parameters
Case 2: For
Case 2a: For a1 = 0 and
Case 2b: For a1 = 0 and
which for specific values of ε3 and ε4 is simplified as
Parameter a2 is not an invariant; hence, it can be zero too. Hence, the two optimal systems are
Case 2c: For
Hence, the one-dimensional optimal systems for γ ≠ 1:
and for γ = 1:
There is a difference in the number of one-dimensional optimal systems, which depends on the parameter γ, which is expected because the structure of the Lie algebra changes.
We proceed our analysis by applying the Lie symmetries to reduce the system of PDEs into a system of ODEs and solve the resulting ODEs by applying the method of Lie symmetries.
3.1 Static Solution
The application of the symmetry vector X1 in (13, 14) provides the static solution
which provides a constraint condition between the velocity v and the height h.
3.2 Point Solution
The application of the symmetry vector X2 provides the time-dependent solution in a specific point, i.e.
The latter equation is nothing else than the oscillator that admits eight Lie point symmetries, and it is maximally symmetric. The Lie symmetries X1, X3, and X4 are inherited symmetries, while the remaining five Lie point symmetries are type II symmetries. The exact solution of (18) is
3.3 Travel-Wave Solution
The linear combination of X1 + cX2 provides travel-wave solutions
in which the new independent parameter ξ is defined as
From (20), we derive
where by substitute in (21) it follows
The latter equation admits only one Lie point symmetry for γ ≽ 1, the autonomous symmetry
Application of the differential invariants of the autonomous symmetry vector
with solution
where the new variables
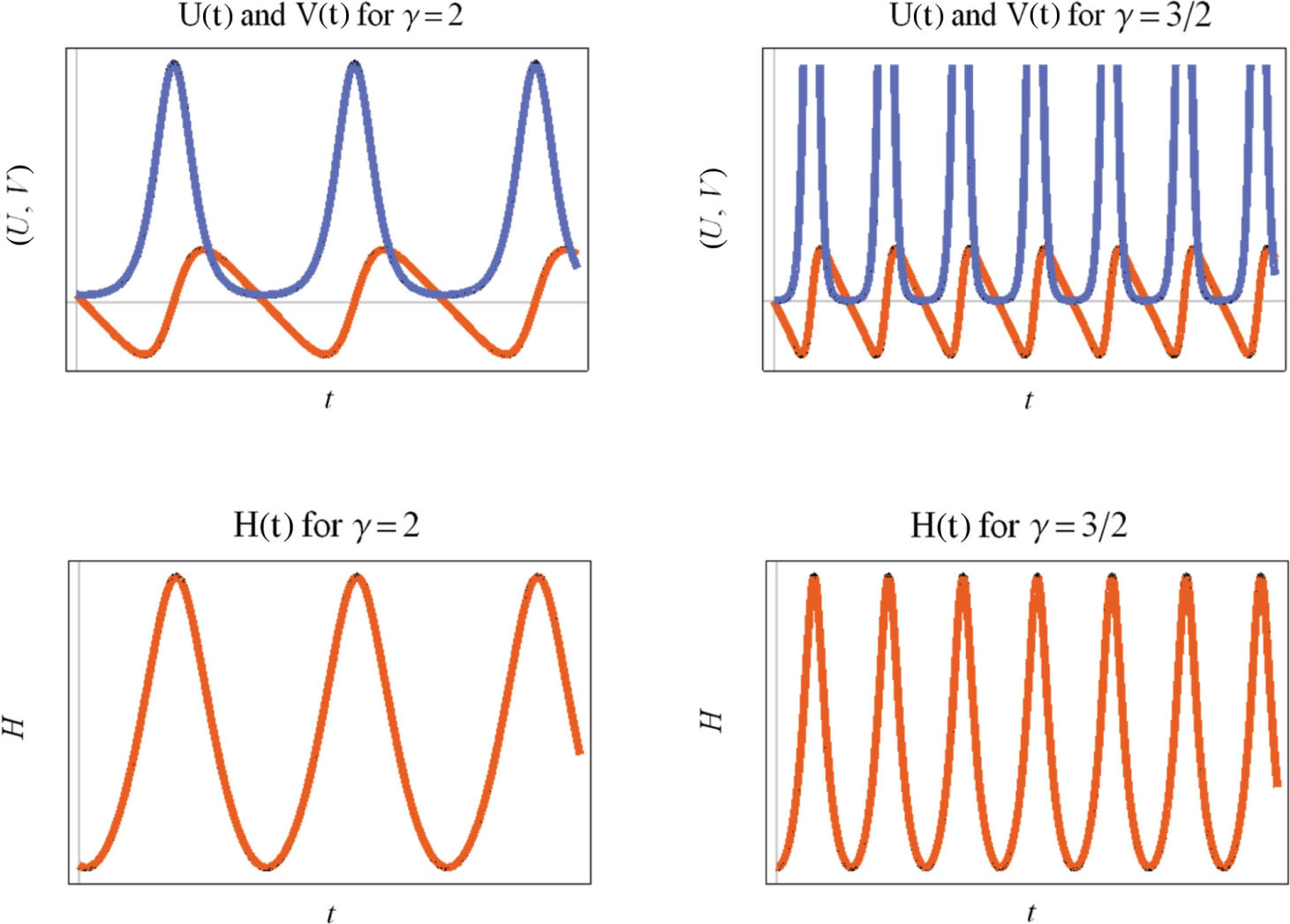
In the simplest case where the integration constant H0 vanishes and γ = 1, the generic solution is given in terms of the Lambert function:
In Figure 1, we present a numerical simulation of the

Qualitative evolution of the functions
3.4 Scaling Solution
The Lie invariants of the scaling symmetry vector X5 are
Hence, the reduced system consists two second-order ODEs:
From (28) and for γ > 1, we find
and replacing in (29), we end up with one second-order ODE with the dependent variable, the
where we have replaced
For arbitrary parameter γ, (31) admits only the autonomous symmetry vector ∂t. In the special case where V0 = 0 and γ = 3, (31) is invariant under the
The Lie invariants of the autonomous symmetry are z = Z and w = Zt; hence, (31) reduces to the first-order ODE:
with solution
For γ = 1, the Lie invariants of the scaling symmetry X5 are
3.5 Reduction with the Vector Fields X3 & X4
The existence of the two symmetry vectors X3, X4 or of the more general symmetry
Consequently, by taking any linear combination of the other symmetries with the vector field Γ, we determine the same reduced equations, where the invariants have been transformed according to the rule (34), except to the case of point reduction, i.e. X2 and scaling solution for γ = 1, which are the two cases we present in the following lines.
3.5.1 Reduction with X 2 + β Γ
By considering the Lie invariants in (13, 14) of the symmetry vector
Therefore, the main difference with the point reduction solution is that the height h is not a constant anymore, and it is given by
while now
It is important here to mention that in order to avoid singular behaviour in finite time, the integration constant
3.5.2 Reduction with X 5 + β Γ
The case of scaling solutions with γ = 1when we consider the symmetry vector Γ in the reduction is totally different from the case before. Indeed, the Lie invariants are
where
From (40), it follows
where by replacing in (41) gives a maximally symmetric second-order ODE with generic solution
while the conditions follows
In contrary to the previous reduction where the evolution of the speeds in the space is linear, in this case, the speed evolves with a logarithmic expansion that provides an initial singularity at x = 0.
3.6 Reduction with the Vector Fields α X 1 + X 5
For the vector field
where by replacing in (13, 14) we find the reduced system
An exact solution for the latter system can be calculated by assuming a power-law behaviour for the functions H and V. Indeed, we find the special solution:
with constraint equation
In the special case of γ = 1, system (45, 46) is simplified as follows:
where now the special solution (47) becomes
From the system (49, 50), we can identify the second-order ODE
where we have replaced
4 Conclusions
In this work, we studied a system of nonlinear PDEs that describe rotating shallow water with the method of Lie symmetries. More specifically, we determine the Lie symmetries for the system (13, 14), and we found that the system of PDEs is invariant under a five-dimensional Lie algebra. The admitted Lie symmetries form the
Indeed, for any symmetry vector, we considered the application of the zero-order Lie invariants, and we rewrote the system of PDEs into a system ODEs, which we were able to solve explicitly in all cases by using the Lie symmetry analysis. Another important feature of the Lie symmetries is that we can transform solutions into solutions after the application of the invariant 1PPT.
From the Lie symmetry vectors X1 − X5 of the system (13, 14), we determine the generic 1PPT to be
It is important to mention that someone could start the present analysis by studying the original three-dimensional first-order differential equations (1–3). Either in that approach the results of the analysis will not change, except from that the point transformation is defined in the space of variables
where by replacing
We conclude that with the application of Lie symmetries we were able to prove the existence of solutions for the rotating shallow wave system (13, 14). Another important observation is that the reduced differential equations were reduced into well-known first-order ODEs. Finally, we proved the existence of travel-wave and scaling solutions.
Acknowledgements
The author thanks the University of Athens for the hospitality provided.
Appendix
A Lie Symmetry Analysis in the Euler Coordinates
The dynamical system (1–3) in the Euler coordinates is written as [29]
The symmetry analysis provide the same results in the Euler coordinates. The applications of the symmetry condition (9) gives the symmetry vector fields
The latter symmetry vectors form the same Lie algebras with that of system (1–3). Because they are in a different representation with the vector fields X1 − X5, the invariant functions are different. Vector fields Y1 and Y2 provide static and stationary solutions while the linear combination
where functions
The latter system can be easily integrated, however its general solution it is not given by a closed-form expression. Numerical simulations of the latter system are presented in Figure 2 for two values of the parameter γ. More specifically for γ = 2 and
Finally, the symmetry vector aY2 + Y3 provide the generic solution
where
References
[1] L. V. Ovsiannikov, Group Analysis of Differential Equations, Academic Press, New York 1982.10.1016/B978-0-12-531680-4.50012-5Suche in Google Scholar
[2] B. K. Harrison, Sigma 1, 001 (2005).10.1504/IJSSCA.2005.008505Suche in Google Scholar
[3] V. A. Baikov, A. V. Gladkov, and R. J. Wiltshire, J. Phys. A: Math. Gen. 31, 7483 (1998).10.1088/0305-4470/31/37/009Suche in Google Scholar
[4] T. G. Mkhize, K. Govinder, S. Moyo, and S. V. Meleshko, Appl. Math. Comput. 301, 25 (2017).10.1016/j.amc.2016.12.019Suche in Google Scholar
[5] A. Paliathanasis and P. G. L. Leach, Int. J. Geom. Meth. Mod. Phys. 13, 1630009 (2016).10.1142/S0219887816300099Suche in Google Scholar
[6] M. C. Nucci and P. G. L. Leach, J. Math. Anal. Appl. 406, 219 (2013).10.1016/j.jmaa.2013.04.050Suche in Google Scholar
[7] M. C. Nucci, J. Nonl. Math. Phys. 20, 451 (2013).10.1080/14029251.2013.855053Suche in Google Scholar
[8] E. Noether, Nachr. d. König. Gesellsch. d. Wiss. zu Göttingen, Math-phys. Klasse, 235 (1918) (translated in English by M. A. Tavel [physics/0503066]).Suche in Google Scholar
[9] N. H. Ibragimov, J. Math. Anal. Appl. 333, 311 (2007).10.1016/j.jmaa.2006.10.078Suche in Google Scholar
[10] W. Sarlet and F. Cantrijin, SIAM Rev. 23, 467 (1981).10.1137/1023098Suche in Google Scholar
[11] P. J. Olver, Applications of Lie Groups to Differential Equations, Springer-Verlag, New York 1993.10.1007/978-1-4612-4350-2Suche in Google Scholar
[12] G. W. Bluman and S. Kumei, Symmetries and Differential Equations, Springer-Verlag, New York 1989.10.1007/978-1-4757-4307-4Suche in Google Scholar
[13] N. H. Ibragimov, CRC Handbook of Lie Group Analysis of Differential Equations, Volume I: Symmetries, Exact Solutions, and Conservation Laws, CRS Press LLC, Florida 2000.Suche in Google Scholar
[14] S. V. Meleshko, Methods for Constructing Exact Solutions of Partial Differential Equations, Springer Science, New York 2005.Suche in Google Scholar
[15] S. V. Meleshko and V. P. Shapeev, J. Nonl. Math. Phys. 18, 195 (2011).10.1142/S1402925111001374Suche in Google Scholar
[16] G. M. Webb and G. P. Zank, J. Math. Phys. A: Math. Theor. 40, 545 (2007).10.1088/1751-8113/40/3/013Suche in Google Scholar
[17] M. C. Nucci and G. Sanchini, Symmetry 7, 1613 (2015).10.3390/sym7031613Suche in Google Scholar
[18] A. Paliathanasis, K. Krishnakumar, K. M. Tamizhmani, and P. G. L. Leach, Mathematics 4, 28 (2016).10.3390/math4020028Suche in Google Scholar
[19] X. Xin, Appl. Math. Lett. 55, 63 (2016).10.1016/j.aml.2015.11.009Suche in Google Scholar
[20] X. Xin, Acta Phys. Sin. 65, 240202 (2016).10.7498/aps.65.240202Suche in Google Scholar
[21] N. Kallinikos and E. Meletlidou, J. Phys. A: Math. Theor. 46, 305202 (2013).10.1088/1751-8113/46/30/305202Suche in Google Scholar
[22] S. Jamal and A. Paliathanasis, J. Geom. Phys. 117, 50 (2017).10.1016/j.geomphys.2017.03.003Suche in Google Scholar
[23] G. M. Webb, J. Phys A: Math. Gen. 23, 3885 (1990).10.1088/0305-4470/23/17/018Suche in Google Scholar
[24] P. G. L. Leach, J. Math. Anal. Appl. 348, 487 (2008).10.1016/j.jmaa.2008.07.018Suche in Google Scholar
[25] M. Tsamparlis and A. Paliathanasis, J. Phys. A: Math. Theor. 44, 175202 (2011).10.1088/1751-8113/44/17/175202Suche in Google Scholar
[26] M. Tsamparlis and A. Paliathanasis, Symmetry (MDPI) 10, 233 (2018).10.3390/sym10070233Suche in Google Scholar
[27] X. Xin, Commun. Theor. Phys. 66, 479 (2016).10.1088/0253-6102/66/5/479Suche in Google Scholar
[28] X. Xin, H. Liu, L. Zhang, and Z. Wang, Appl. Math. Lett. 88, 132 (2019).10.1016/j.aml.2018.08.023Suche in Google Scholar
[29] B. Cheng, P. Qu, and C. Xe, SIAM J. Math. Anal. 50, 2486 (2018).10.1137/17M1130101Suche in Google Scholar
[30] B. Galperin, H. Nakano, H.-P. Huang, and S. Sukoriansky, Geoph. Res. Let. 31, L13303 (2004).10.1029/2004GL019691Suche in Google Scholar
[31] V. Zeitlin, S. B. Medvedev, and R. Plougonven, J. Fluid. Mech. 481, 269 (2003).10.1017/S0022112003003896Suche in Google Scholar
[32] D. A. Randall, Mon. Weather Rev. 122, 1371 (1994).10.1175/1520-0493(1994)122<1371:GAATFD>2.0.CO;2Suche in Google Scholar
[33] M. Senthilvelan and M. Lakshmanan, Int. J. Nonl. Mech. 31, 339 (1996).10.1016/0020-7462(95)00063-1Suche in Google Scholar
[34] S. Szatmari and A. Bihlo, Comm. Nonl. Sci. Num. Sim. 19, 530 (2014).10.1016/j.cnsns.2013.06.030Suche in Google Scholar
[35] A. A. Chesnokov, J. Appl. Mech. Techn. Phys. 49, 737 (2008).10.1007/s10808-008-0092-5Suche in Google Scholar
[36] J.-G. Liu, Z.-F. Zeng, Y. He, and G.-P. Ai, Int. J. Nonl. Sci. Num. Sim. 16, 114 (2013).Suche in Google Scholar
[37] A. A. Chesnokov, Eur. J. Appl. Math. 20, 461 (2009).10.1017/S0956792509990064Suche in Google Scholar
[38] M. Pandey, Int. J. Nonl. Sci. Num. Sim. 16, 93 (2015).10.5455/2320-6012.ijrms20140204Suche in Google Scholar
[39] X. Xin, L. Zhang, Y. Xia, and H. Liu, Appl. Math. Lett. 94, 112 (2019).10.1016/j.aml.2019.02.028Suche in Google Scholar
[40] V. V. Morozov, Izv. Vyssh. Uchebn. Zaved. Mat. 5, 161 (1958).Suche in Google Scholar
[41] G. M. Mubarakzyanov, Izv. Vyssh. Uchebn. Zaved. Mat. 32, 114 (1963).Suche in Google Scholar
[42] G. M. Mubarakzyanov, Izv. Vyssh. Uchebn. Zaved. Mat. 34, 99 (1963).Suche in Google Scholar
[43] G. M. Mubarakzyanov, Izv. Vyssh. Uchebn. Zaved. Mat. 35, 104 (1963).Suche in Google Scholar
[44] P. J. Olver, Applications of Lie Groups to Differential Equations, Second Edition, Springer-Verlag, New York 1993.10.1007/978-1-4612-4350-2Suche in Google Scholar
[45] X. Hu, Y. Li and Y. Chen, J. Math. Phys. 56, 053504 (2015).10.1063/1.4921229Suche in Google Scholar
[46] V. Ermakov, Univ. Izv. Kiev Ser. III, 9, 1 (1880) (The English version, translated by A. O. Harin, can be found in Applicable analysis and Discrete Mathematics).Suche in Google Scholar
[47] E. Pinney, P. Am. Math. Soc. 1, 681 (1950).10.1090/S0002-9939-1950-0037979-4Suche in Google Scholar
©2019 Walter de Gruyter GmbH, Berlin/Boston
Artikel in diesem Heft
- Frontmatter
- Solid State Physics & Materials Science
- Electronic and Optical Properties of Cubic Perovskites CsPbCl3−yIy (y = 0, 1, 2, 3)
- Effect of Indium Doping on Optical Parameter Properties of Sol–Gel-Derived ZnO Thin Films
- Electrical Conductivity of Zirconium Tetrachloride Solutions in Molten Sodium, Potassium and Cesium Chlorides
- Hydrogen Sulfide Gas Sensor Based on Copper/Graphene Oxide Composite Film-Coated Tapered Single-Mode Fibre Interferometer
- Dynamical Systems & Nonlinear Phenomena
- Detecting the Flow Pattern Transition in the Gas-Liquid Two-Phase Flow Using Multivariate Multi-Scale Entropy Analysis
- Rapid Communication
- Simplistic Synthesis and Enhanced Photocatalytic Performance of Spherical ZnO Nanoparticles Prepared from Arabinose Solution
- The Deflection of Rotating Composite Tapered Beams with an Elastically Restrained Root in Hygrothermal Environment
- Effect of Dust Ion Collision on Dust Ion Acoustic Solitary Waves for Nonextensive Plasmas in the Framework of Damped Korteweg–de Vries–Burgers Equation
- Hydrodynamics
- Lie Symmetries and Similarity Solutions for Rotating Shallow Water
- A Note on the Significance of Quartic Autocatalysis Chemical Reaction on the Motion of Air Conveying Dust Particles
Artikel in diesem Heft
- Frontmatter
- Solid State Physics & Materials Science
- Electronic and Optical Properties of Cubic Perovskites CsPbCl3−yIy (y = 0, 1, 2, 3)
- Effect of Indium Doping on Optical Parameter Properties of Sol–Gel-Derived ZnO Thin Films
- Electrical Conductivity of Zirconium Tetrachloride Solutions in Molten Sodium, Potassium and Cesium Chlorides
- Hydrogen Sulfide Gas Sensor Based on Copper/Graphene Oxide Composite Film-Coated Tapered Single-Mode Fibre Interferometer
- Dynamical Systems & Nonlinear Phenomena
- Detecting the Flow Pattern Transition in the Gas-Liquid Two-Phase Flow Using Multivariate Multi-Scale Entropy Analysis
- Rapid Communication
- Simplistic Synthesis and Enhanced Photocatalytic Performance of Spherical ZnO Nanoparticles Prepared from Arabinose Solution
- The Deflection of Rotating Composite Tapered Beams with an Elastically Restrained Root in Hygrothermal Environment
- Effect of Dust Ion Collision on Dust Ion Acoustic Solitary Waves for Nonextensive Plasmas in the Framework of Damped Korteweg–de Vries–Burgers Equation
- Hydrodynamics
- Lie Symmetries and Similarity Solutions for Rotating Shallow Water
- A Note on the Significance of Quartic Autocatalysis Chemical Reaction on the Motion of Air Conveying Dust Particles