Riemann–Hilbert Problem and Multi-Soliton Solutions of the Integrable Spin-1 Gross–Pitaevskii Equations
-
Xiu-Bin Wang
 and
Bo Han
and
Bo Han

Abstract
Under investigation in this article is the integrable spin-1 Gross–Pitaevskii (SGP) equations, which can be used to describe light transmission in bimodal nonlinear optical fibres. The spectral analysis with 4 × 4 Lax pairs is performed for the integrable SGP equations, from which a Riemann Hilbert problem is formulated. Furthermore, N-soliton solutions of this integrable SGP equations are expressed in terms of solutions of the Riemann–Hilbert problem by using the Plemelj formulae. Finally, collision dynamics between two solitons is also analyzed. Our results can be used to enrich and explain some related nonlinear phenomena.
1 Introduction
The nonlinear Schrödinger (NLS) equation and its variants are well known as general models for solitons and nonlinear waves, as well as relevant phenomenology, in many areas of physics containing water waves, plasmas, Bose-Einstein condensates (BECs), nonlinear optics, etc. [1], [2], [3], [4], [5], [6], [7], [8], [9], [10], [11]. Among different solutions of these equations, the soliton in some related fields has begun to attract attention in recent years. In 1967s, based on the original inverse scattering transformation (IST) [12], [13], [14], an effective and convenient way [i.e. Riemann–Hilbert (RH) method] is first proposed by Novikov and coworkers [15] to construct soliton solutions of nonlinear equations in their article. Very recently, Yang, Wang, Geng, Guo, etc. [16], [17], [18], [19], [20], [21], [22], [23], [24], [25], [26], [27], [28], [29], [30], [31] have made a great contribution in this field.
It is well known that the coupled Gross–Pitaevskii equation is often used to describe the interactions among the modes in nonlinear optics, components in BECs, etc. Therefore, in this article, we mainly focus on the integrable spin-1 Gross–Pitaevskii (SGP) equation [32], [33], [34]:
where
where
where
In what follows, we let a = b = 1 for the convenience of the analysis.
Recently, there are many investigations on solutions of integrable SGP system (1) [35], [36], [37], [38], [39], [40]. For example, in [32], Fokas method is used to investigate the initial-boundary value problem for the integrable SGP (1). In addition, a similarity transformation is used to investigate its non-autonomous multi-rogue wave solutions [34]. It is well known that RH method is a powerful and effective approach to derive multi-soliton solutions. However, as (1) involves a 4 × 4 matrix spectral problem, the RH problem (RHP) for (1) is rather complicated to study. The research in this direction, to the best of the authors’ knowledge, has not been investigated before. The principal aim of the present article is to investigate N-soliton solutions of (1) by utilizing RH method. Besides, we also make some graphical analysis of these solutions.
The structure of this article is given as follows. In the following section, starting from the Lax pair we construct the RHP of (1). In Section 3, we derive N-soliton solutions of (1). Finally, some conclusions and discussions are provided in Section 4.
2 Riemann–Hilbert Problem
In the present section, we consider the inverse scattering transform (IST) for (1) using the RH formulation.
For the sake of convenience, a new matrix spectral function
such that the Lax pair (2) can be transformed into another equivalent form:
where
and
where † means the Hermitian of a matrix.
For the scattering problem, let us first introduce matrix Jost solutions
Here 𝕀 is a 4 × 4 identity matrix, and the subscripts of J denote which end of the x axis the boundary conditions are taken. Then, according to tr(Q) = 0 and Abel’s formula, we obtain
where
is a scattering matrix. Due to
If we treat the QΨ term in (11) as a inhomogeneous term and note that the solution to the (11) on its left hand is E, then the Jost solutions J± can be explicitly obtained by the Volterra integral equations
Therefore, J± allows analytical continuations off the axis
then the Jost solutions
and
In what follows, we must construct the analytic counterpart of P+ in ℂ−. To this end, we should consider adjoint equation of (5a):
It is easy to find the matrix inverses of J± admit the adjoint (10). Let us introduce
Then by similar techniques as used above, we can obtain that adjoint Jost solutions
are analytic in
To sum up, we have obtained two matrix functions P1 and P2, which are analytic for ℂ+ and ℂ−, respectively. Hence, we obtain an RHP for the GSP system (1)
where
and the canonical normalization condition for the RHP (20) is
The solution to the RHP (20) will not be unique if the zeros of
In what follows, we construct the IST of the GSP system (1), from which we recover
then putting it into (5a), and comparing O(1) terms yields
which means that
where
The symmetry relation (7) of the matrix Q leads to symmetry properties in the scattering matrix and the Jost functions. Thus from (5a), we obtain
Using the large-x boundary conditions of J± and (16), we know that
In view of this property (28) as well as definitions (14) and (18), we can find that the analytic solution P± meets the involution property
In view of the relation (9), we find that S admits the following involution property
From the above involution property, we have the symmetry relation
By comparing it with second equation in (23), one can obtain
In order to construct the spatial evolutions for vectors vk(x, t), using the x derivative to
i.e.
In the same way, the time dependence on
i.e.
Then by combining these results, one can obtain
in which
In the following section, the above results will be applied to construct the multi-soliton solutions of the GSP (1).
3 Multi-Soliton Solutions
In this section, the multi-soliton solutions to (1) will be constructed by using the RHP (20) with
where the matrix M is defined by
Then utilizing (36) and (37), from (26) we can obtain the multi-soliton solutions for (1):
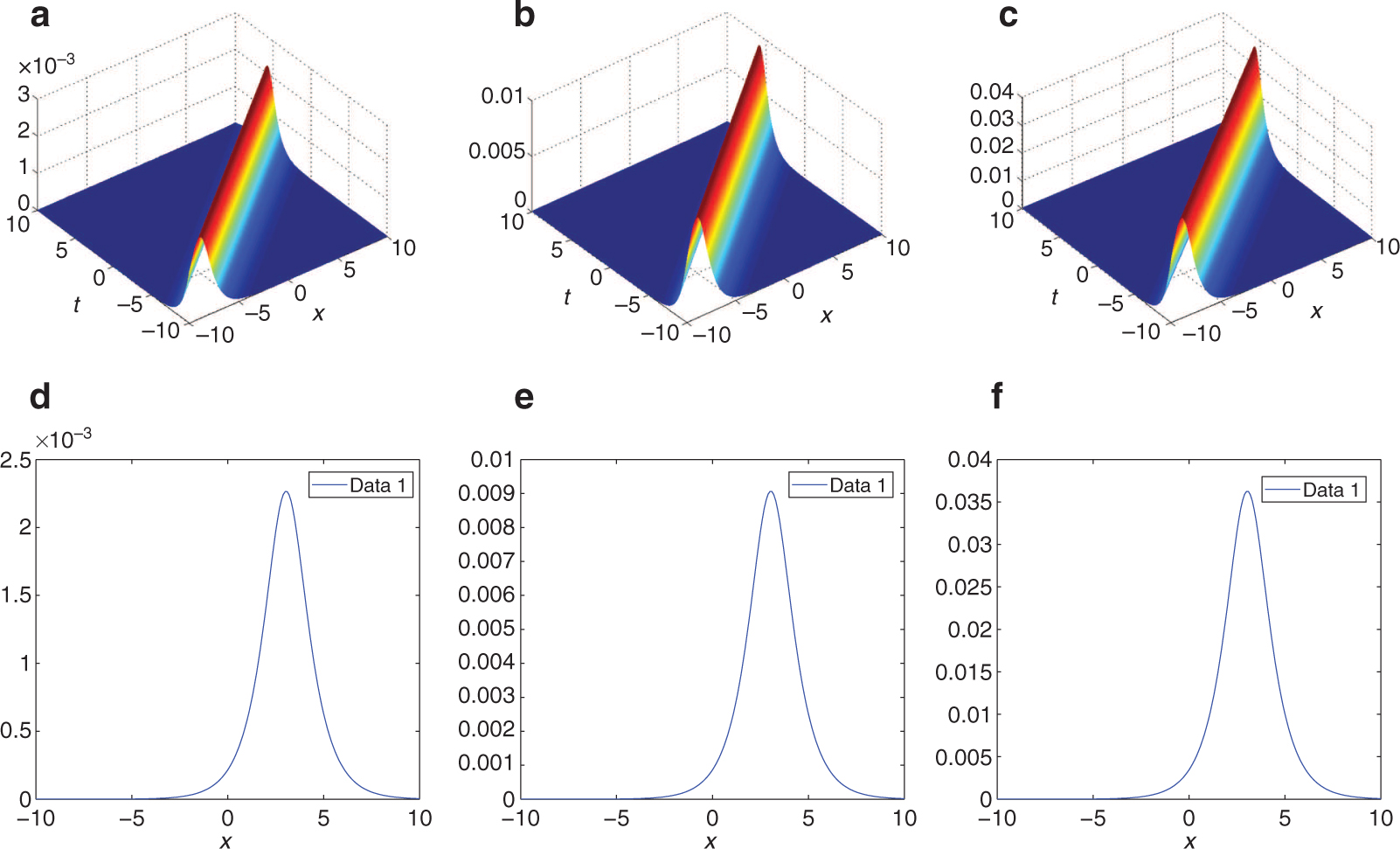
(Colour online) The single soliton via solutions (44)
Through above analysis, the multi-soliton solutions for the GSP (1) can be written out explicitly as
with
where
3.1 Single-Soliton Solution
Taking N = 1 in (40) with (41), we have
In the following, taking
the single-soliton solution (42) can be rewritten as
where
Thus, the above solution (42) can be transformed into the following form:
By choosing appropriate parameters, we show its single-soliton solution in Figure 1, from which we know that the amplitude, velocity, and width of the single soliton keep invariable during the propagation. Besides, it is worthy to point out that the single-soliton solution shown in Figure 1 is a line soliton in three planes.
3.2 Two-Soliton Solution
In a similar way, taking N = 2 in (40) with (41), (40) can be reduced to a two-soliton solution of the GSP system (1):
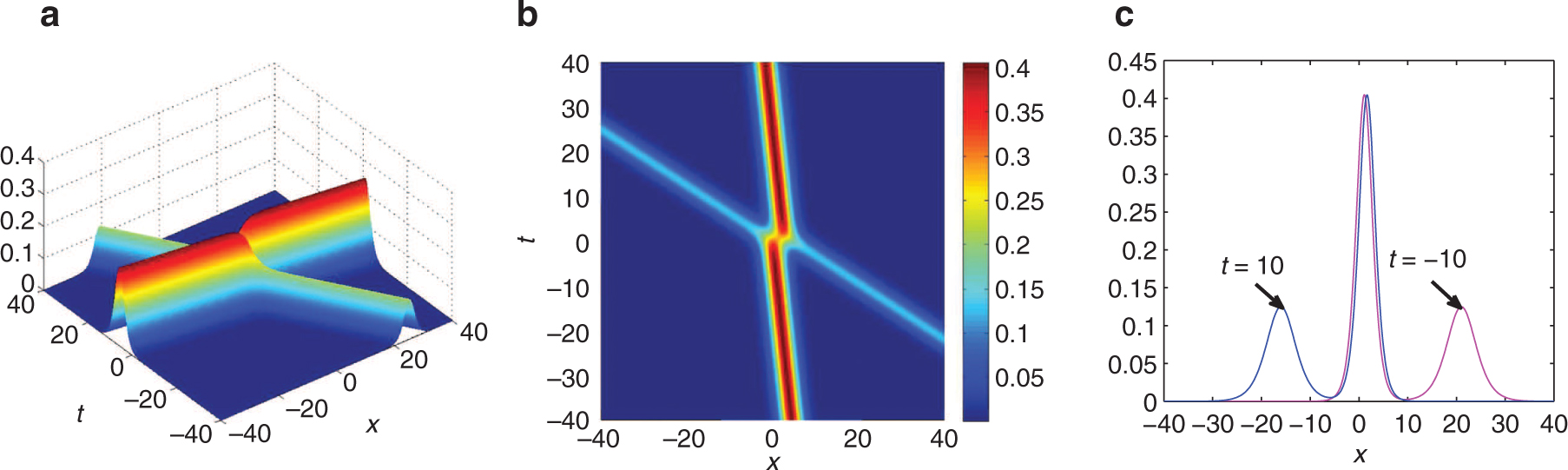
(Colour online) The two-bell soliton solution via (47)
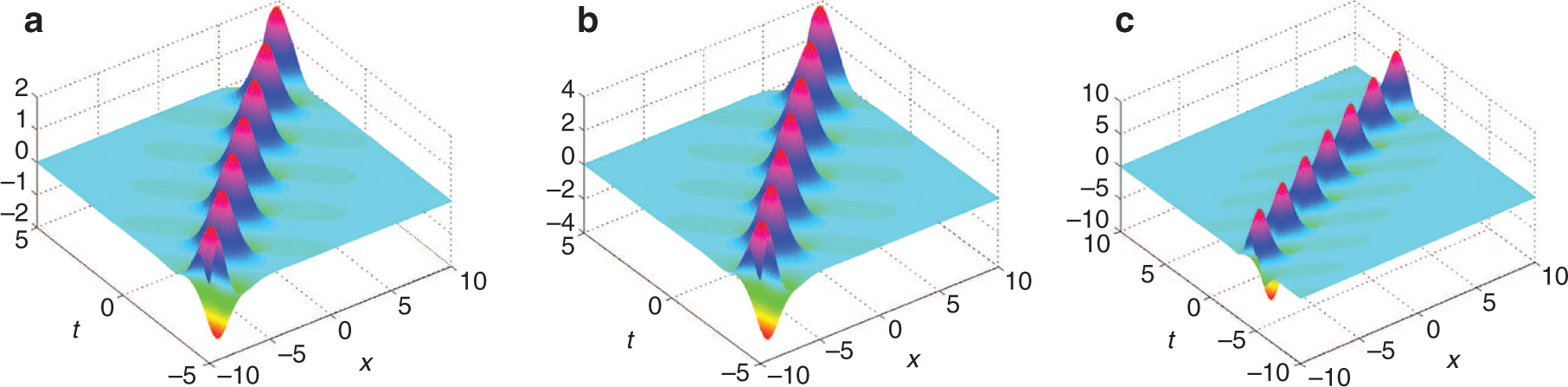
(Colour online) The breather-type solution via (47)
where
and
4 Conclusions and Discussions
In this work, the integrable SGP (1) has been systematically discussed by employing RH method. Then N-soliton solutions of (1) are obtained by using its RH formulation. In order to help the readers understand the soliton solutions better, we have made some graphical analysis of those solutions. Our results can be used to further enrich the dynamic behavior of the nonlinear wave fields. The article shows that the effective method (i.e. RH method) provides a direct and powerful mathematical tool to seek new exact solutions of nonlinear evolution equations (NLEEs), which should be suitable to study other models in mathematical physics and engineering. Comparing with the soliton solution formulae obtained here and those constructed by Darboux transformation and Hirota bilinear method, it is very clear that the expressions are much simpler. More importantly, as the coupled NLS equations arise in a wide variety of physical subjects such as nonlinear optics, water waves, BECs, etc, these results should prove helpful to the studies of those physical problems.
Funding source: National Natural Science Foundation of China
Award Identifier / Grant number: 11871180
Funding statement: We express our sincere thanks to the editor and reviewers for their valuable comments. This work is supported by the National Natural Science Foundation of China (Grant No. 11871180).
References
[1] M. J. Ablowitz and P. A. Clarkson, Solitons, Nonlinear Evolution Equations and Inverse Scattering, Cambridge University Press, Cambridge, UK 1990.10.1017/CBO9780511623998Search in Google Scholar
[2] G. P. Agrawal, Nonlinear Fiber Optics, Academic Press, San Diego 1995.Search in Google Scholar
[3] L. Pitaevskii and S. Stringari, Bose-Einstein Condensation, Oxford University Press, Oxford 2003.Search in Google Scholar
[4] R. Carretero-González, D. J. Frantzeskakis, and P. G. Kevrekidis, Nonlinearity 21, R139 (2008).10.1088/0951-7715/21/7/R01Search in Google Scholar
[5] Y. Wang, Y. Yang, S. He, W. Wang, AIP Adv. 7, 105209 (2017).10.1063/1.5001157Search in Google Scholar
[6] Y. V. Kartashov, B. A. Malomed, and L. Torner, Rev. Mod. Phys. 83, 247 (2011).10.1103/RevModPhys.83.247Search in Google Scholar
[7] V. E. Zakharov, J. Appl. Mech. Tech. Phys. 9, 190 (1968).10.1007/BF00913182Search in Google Scholar
[8] A. Hasegawa and F. Tappert, Appl. Phys. Lett. 23, 142 (1973).10.1063/1.1654836Search in Google Scholar
[9] D. J. Benney and A. C. Newell, Stud. Appl. Math. 46, 133 (1967).10.1002/sapm1967461133Search in Google Scholar
[10] G. P. Agrawal, Nonlinear Fiber Optics, Academic Press, San Diego 2001.Search in Google Scholar
[11] S. V. Manakov, Sov. Phys. JETP 38, 248 (1974).Search in Google Scholar
[12] M. J. Ablowitz and P. Clarkson, Soliton, Nonlinear Evolution Equations and Inverse Scattering, Cambridge University Press, Cambridge, UK 1991.10.1017/CBO9780511623998Search in Google Scholar
[13] M. J. Ablowitz, D. J. Kaup, A. C. Newell, and H. Segur, Stud. Appl. Math. 53, 249 (1974).10.1002/sapm1974534249Search in Google Scholar
[14] C. S. Gardner, J. M. Greene, M. D. Kruskal, and R. M. Miura, Phys. Rev. Lett. 19, 1095 (1967).10.1103/PhysRevLett.19.1095Search in Google Scholar
[15] S. Novikov, S. Manakov, L. Pitaevskii, and V. Zakharov, Theory of Solitons: The Inverse Scattering Method, Consultants Bureau, New York and London 1984.Search in Google Scholar
[16] M. J. Ablowitz and A. S. Fokas, Complex Variables: Introduction and Applications, Cambridge University Press, Cambridge, UK 2003.10.1017/CBO9780511791246Search in Google Scholar
[17] A. S. Fokas, A Unified Approach to Boundary Value Problems, in CBMS-NSF Regional Conference Series in Applied Mathematics, SIAM 2008.10.1137/1.9780898717068Search in Google Scholar
[18] X. Geng and J. Wu, Wave Motion 60, 62 (2016).10.1016/j.wavemoti.2015.09.003Search in Google Scholar
[19] B. Guo and L. Ling, J. Math. Phys. 53, 133 (2012).10.1063/1.4732464Search in Google Scholar
[20] D. S. Wang, D. J. Zhang, and J. Yang, J. Math. Phys. 51, 023510 (2010).10.1063/1.3290736Search in Google Scholar
[21] J. Xu and E. G. Fan, Proc. R. Soc. Lond. A 469, 20130068 (2013).10.1098/rspa.2013.0068Search in Google Scholar PubMed PubMed Central
[22] J. Xu, E.G. Fan, and Y. Chen, Math. Phys. Anal. Geom. 16, 253 (2013).10.1007/s11040-013-9132-3Search in Google Scholar
[23] W. X. Ma, J. Geom. Phys. 132, 45 (2018).10.1016/j.geomphys.2018.05.024Search in Google Scholar
[24] D. Kaup and J. Yang, Inverse Probl. 25, 105010 (2009).10.1088/0266-5611/25/10/105010Search in Google Scholar
[25] J. Yang, Nonlinear Waves in Integrable and Nonintegrable Systems, SIAM 2010.10.1137/1.9780898719680Search in Google Scholar
[26] J. Yang and D. Kaup, J. Math. Phys. 50, 121 (2009).10.1063/1.3075567Search in Google Scholar
[27] Y. S. Zhang, Y. Cheng, and J. S. He, J. Nonlinear Math. Phys. 24, 210 (2017).10.1080/14029251.2017.1313475Search in Google Scholar
[28] S. F. Tian. J. Differ. Equ. 262, 506 (2017).10.1016/j.jde.2016.09.033Search in Google Scholar
[29] S. F. Tian, J. Phys. A: Math. Theor. 50, 395204 (2017).10.1088/1751-8121/aa825bSearch in Google Scholar
[30] S. F. Tian, Proc. R. Soc. Lond. A 472, 20160588 (2016).10.1098/rspa.2016.0588Search in Google Scholar PubMed PubMed Central
[31] Y. Xiao and E. G. Fan, Chin. Ann. Math. Ser. B 37, 373 (2016).10.1007/s11401-016-0966-4Search in Google Scholar
[32] Z. Y. Yan, Chaos 27, 053117 (2017).10.1063/1.4984025Search in Google Scholar PubMed
[33] Y. Wang, Y. Zhou, S. Zhou, and Y. Zhang, Phys. Rev. E 94, 012225 (2016).10.1103/PhysRevE.94.012225Search in Google Scholar PubMed
[34] L. Li and F. J. Yu, Sci. Rep. 7, 10638 (2017).10.1038/s41598-017-10205-4Search in Google Scholar PubMed PubMed Central
[35] J. Ieda, T. Miyakawa, and M. Wadati, Phys. Rev. Lett. 93, 194102 (2004).10.1103/PhysRevLett.93.194102Search in Google Scholar PubMed
[36] Y. Kawaguchi and M. Ueda, Phys. Rep. 520, 253 (2012).10.1016/j.physrep.2012.07.005Search in Google Scholar
[37] M. Olshanii, Phys. Rev. Lett. 81, 437 (1998).10.1103/PhysRevLett.81.437Search in Google Scholar
[38] G. P. Agrawal, Nonlinear Fiber Optics, 4th ed., Academic Press, San Diego, CA 2006.10.1016/B978-012369516-1/50011-XSearch in Google Scholar
[39] J. Ieda, T. Miyakawa, and M. Wadati, J. Phys. Soc. Jpn. 73, 2996 (2004).10.1143/JPSJ.73.2996Search in Google Scholar
[40] L. Li, Z. Li, B. A. Malomed, D. Mihalache, and W. M. Liu, Phys. Rev. A 72, 033611 (2005).10.1103/PhysRevA.72.033611Search in Google Scholar
[41] V. E. Zakharov, S. V. Manakov, S. P. Novikov, and L. P. Pitaevskii, The Theory of Solitons: The Inverse Scattering Method, Consultants Bureau, New York 1984.Search in Google Scholar
[42] J. Yang, Nonlinear Waves in Integrable and Non-Integrable Systems, Society for Industrial and Applied Mathematics 2010.10.1137/1.9780898719680Search in Google Scholar
©2018 Walter de Gruyter GmbH, Berlin/Boston
Articles in the same Issue
- Frontmatter
- General
- Einstein’s “Clock Hypothesis” and Mössbauer Experiments in a Rotating System
- Atomic, Molecular & Chemical Physics
- Dual Fabry–Pérot Interferometric Carbon Monoxide Sensor Based on the PANI/Co3O4 Sensitive Membrane-Coated Fibre Tip
- Study of the Geometric Structures, Electronic and Magnetic Properties of Aluminium-Antimony Alloy Clusters
- A Density Functional Theory Study on the Structures and Electronic Properties of XAln (X = Br, I; n = 3–15) Clusters
- Dynamical Systems & Nonlinear Phenomena
- Three-Dimensional Instability of Opposite Polarity Nonthermal Dusty Plasma
- Riemann–Hilbert Problem and Multi-Soliton Solutions of the Integrable Spin-1 Gross–Pitaevskii Equations
- Quantum Theory
- Space-time from Collapse of the Wave-function
- Gravitation & Cosmology
- Modeling Cosmic Expansion, and Possible Inflation, as a Thermodynamic Heat Engine
- Hydrodynamics
- Safety Factor for the New Exact Plasma Equilibria
Articles in the same Issue
- Frontmatter
- General
- Einstein’s “Clock Hypothesis” and Mössbauer Experiments in a Rotating System
- Atomic, Molecular & Chemical Physics
- Dual Fabry–Pérot Interferometric Carbon Monoxide Sensor Based on the PANI/Co3O4 Sensitive Membrane-Coated Fibre Tip
- Study of the Geometric Structures, Electronic and Magnetic Properties of Aluminium-Antimony Alloy Clusters
- A Density Functional Theory Study on the Structures and Electronic Properties of XAln (X = Br, I; n = 3–15) Clusters
- Dynamical Systems & Nonlinear Phenomena
- Three-Dimensional Instability of Opposite Polarity Nonthermal Dusty Plasma
- Riemann–Hilbert Problem and Multi-Soliton Solutions of the Integrable Spin-1 Gross–Pitaevskii Equations
- Quantum Theory
- Space-time from Collapse of the Wave-function
- Gravitation & Cosmology
- Modeling Cosmic Expansion, and Possible Inflation, as a Thermodynamic Heat Engine
- Hydrodynamics
- Safety Factor for the New Exact Plasma Equilibria