Why Agents Need Discretion: The Business Judgment Rule as Optimal Standard of Care
-


Abstract
Should managers be liable for ill-conceived business decisions? One answer is given by U.S. courts, which almost never hold managers liable for their mistakes. In this paper, we address the question in a theoretical model of delegated decision making. We find that courts should indeed be lenient as long as contracts are restricted to be linear. With more general compensation schemes, the answer depends on the precision of the court’s signal. If courts make many mistakes in evaluating decisions, they should not impose liability for poor business judgment.
Appendix
First, take a
Because
It then also follows that
Second, take a
such that if
because there is more weight on the larger of the two payoffs. If instead
The first claim is a direct consequence of risk aversion. With a linear contract, the expected wage (without liability) from the risky project at
For the proof of the second claim, we define
the agent also prefers the risky to the safe project with no liability and the contract
The intuition behind this result is that the agent would be willing to pay at least
Using [18], we can conclude that
With reasoning as before, we get
and from this
Because
Again, we let
We will show in the following that the principal gets a higher payoff with
we can apply Lemma 2, and get
Next, we will show that the agent is weakly better off with
where
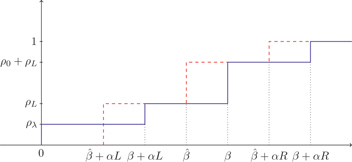
The (red) dashed line is the distribution function
We use this figure to show that
Knowing that the agent’s utility is weakly greater under no liability immediately gives us the participation constraint
We consider the problem of implementing a given
It holds that
with the usual complementary slackness conditions. Using these necessary conditions we can prove that in any optimum it holds that
This follows from
We can immediately determine the sign of
If
It can be seen that if
In the following, we solve the problem of choosing
We know that
the first two terms in
Note that the left hand side shows the direct effect of a change in
We can exploit that
where
Assume first that
which means that
Assume now
and therefore
and
We can conclude that
hence
We have to show that in these two cases
We have to show that this expression is increasing in
For the linear error term with distribution
For the normal error term with distribution
and, using integration by parts,
Putting everything together, we get
In a first step, we show that as the signal becomes more precise, eventually a positive standard must be better. We show that with a perfect signal, the same threshold as under no liability,
For the so defined contract it holds that
It exposes the agent to a lottery between
In a second step, we consider the limit
It remains to show that the principal’s payoff, once it is equal to
where we have modified the earlier notation to make the dependence on precision explicit. We now look at the principal’s cost of implementing
It follows from Assumption 1 that
and consequently
Because
This time, we cannot a priori exclude the case that the monotonicity constraint is binding in the other direction
Let
For the regime
In case that
and are satisfied due to our assumptions. In general, we can only show that there should be no liability after the safe alternative
with
The first order conditions are now
Only the first constraint has changed, and it follows immediately that
if either
As before,
and hence implies
Hence, the cost of implementing any
We will show that if the signal is as precise as stated and the standard is set at
To conclude from the assumption on
which holds because
The result that
Next we consider the case
while
and
From
which implies
Exploiting
Since the right-hand side is increasing in
For linear contracts we know that
For the case of more general contracts, Lambert (1986) treats the case without liability in detail and shows that if
Acknowledgments
We thank two anonymous referees as well as Matthias Lang, Holger Spamann, Kathryn Spier, participants of the SFB TR 15 meeting in Caputh and seminar participants in Frankfurt and Bonn for helpful comments and suggestions.
References
Allen, William T., Jack B. Jacobs and Leo E. Strine Jr. 2002. “Realigning the Standard of Review of Director Due Care with Delaware Public Policy: A Critique of Van Gorkom and Its Progeny as a Standard of Review Problem,” 96(2) Northwestern University Law Review 449–466.Search in Google Scholar
American Law Institute. 1992. Principles of Corporate Governance: Analysis and Recommendations, Vol. 1. St. Paul, MN: American Law Institute Publishers.Search in Google Scholar
Armour, John and Jeffrey N. Gordon. 2014. “Systemic Harms and Shareholder Value”, 6 Journal of Legal Analysis 35–85.10.1093/jla/lau004Search in Google Scholar
Baker, Tom and Sean J. Griffith. 2010. Ensuring Corporate Misconduct, How Liability Insurance Undermines Shareholder Litigation. Chicago: University of Chicago Press.10.7208/chicago/9780226035079.001.0001Search in Google Scholar
Biais, Bruno and Catherine Casamatta. 1999. “Optimal Leverage and Aggregate Investment,” 54(4) The Journal of Finance 1291–1323.10.1111/0022-1082.00147Search in Google Scholar
Black, Bernard S., Brian R. Cheffins and Michael Klausner. 2006a. “Outside Director Liability”, 58 Stanford Law Review 1055–1159.10.2139/ssrn.382422Search in Google Scholar
Black, Bernard S., Brian R. Cheffins and Michael Klausner. 2006b. “Outside Director Liability: A Policy Analysis,” 162(1) Journal of Institutional and Theoretical Economics 5–20.10.1628/093245606776166543Search in Google Scholar
Bundesgerichtshof. 2005. “Judgment 3 StR 470/04 of December 21, 2005,” 50(1) Entscheidungen Des Bundesgerichtshofs in Strafsachen 331–346.Search in Google Scholar
Campbell, Rutherford B. 2011. “Normative Justifications for Lax (or No) Corporate Fiduciary Duties: A Tale of Problematic Principles, Imagined Facts and Inefficient Outcomes,” 99(2) Kentucky Law Journal 231–257.Search in Google Scholar
Chaigneau, Pierre, Alex Edmans and Daniel Gottlieb. 2014. “The Informativeness Principle Under Limited Liability,” European Corporate Governance Institute (ECGI) - Finance Working Paper No. 439/2014.10.3386/w20456Search in Google Scholar
Chancery Court of Delaware. 1996. “Gagliardi v. Trifoods International, Inc., Atlantic Reporter,” Atlantic Reporter, 2d Series, 683, 1049–1055.Search in Google Scholar
Chancery Court of Delaware. 2009. “In re Citigroup Inc. Shareholder Derivative Litigation,” Atlantic Reporter, 2d Series, 964, 106–140.Search in Google Scholar
Craswell, Richard and John E. Calfee. 1986. “Deterrence and Uncertain Legal Standards,” 2 Journal of Law Economics & Organization 279–303.Search in Google Scholar
Demski, Joel S. and David E. M Sappington. April 1987. “Delegated Expertise,” 25(1) Journal of Accounting Research 68–89.10.2307/2491259Search in Google Scholar
Easterbrook, Frank H. and Daniel R. Fischel. 1991. The Economic Structure of Corporate Law. Cambridge, Mass: Harvard University Press.Search in Google Scholar
Eisenberg, Melvin Aron. 1993. “The Divergence of Standards of Conduct and Standards of Review in Corporate Law,” 62(3) Fordham Law Review 437–468.Search in Google Scholar
Fairfax, Lisa. 2005. “Spare the Rod, Spoil the Director? Revitalizing Directors’ Fiduciary Duty Through Legal Liability”, 42 Houston Law Review 393–456.10.2139/ssrn.601970Search in Google Scholar
Fama, Eugene F. and Michael C. Jensen. June 1983. “Separation of Ownership and Control,” 26(2) Journal of Law and Economics 301–325.10.4324/9780203888711.ch6Search in Google Scholar
Fischel, Daniel R. 1985. “The Business Judgment Rule and the Trans Union Case,” 40 The Business Lawyer 1437–1455.Search in Google Scholar
Gevurtz, Franklin A. 2007. “Disney in a Comparative Light,” 55(3) American Journal of Comparative Law 453–492.10.1093/ajcl/55.3.453Search in Google Scholar
Gromb, Denis and David Martimort. November 2007. “Collusion and the Organization of Delegated Expertise,” 137(1) Journal of Economic Theory 271–299.10.1016/j.jet.2007.01.003Search in Google Scholar
Gutierrez, Maria. October 2003. “An Economic Analysis of Corporate Directors’ Fiduciary Duties,” 34(3) The RAND Journal of Economics 516–535.10.2307/1593744Search in Google Scholar
Hakenes, Hendrik and Isabel Schnabel. 2014. “Bank Bonuses and Bailouts,” 46(1) Journal of Money, Credit and Banking 259–288.10.1111/jmcb.12090Search in Google Scholar
Holmström, Bengt. 1979. “Moral Hazard and Observability,” 10(1) The Bell Journal of Economics 74–91.10.2307/3003320Search in Google Scholar
Innes, Robert D. October 1990. “Limited Liability and Incentive Contracting with Ex-Ante Action Choices,” 52(1) Journal of Economic Theory 45–67.10.1016/0022-0531(90)90066-SSearch in Google Scholar
Kadan, Ohad and Jeroen M. Swinkels. January 2008. “Stocks or Options? Moral Hazard, Firm Viability, and the Design of Compensation Contracts,” 21(1) Review of Financial Studies 451–482.10.1093/rfs/hhm077Search in Google Scholar
Kaplow, Louis and Steven Shavell. 1994. “Accuracy in the Determination of Liability,” 37 Journal of Law and Economics 1–15.10.3386/w4203Search in Google Scholar
Kraakman, Reinier, Hyun Park and Steven Shavell. 1994. “When Are Shareholder Suits in Shareholders’ Interests?”, Georgetown Law Journal 1733–1775.Search in Google Scholar
Lambert, Richard A. April 1986. “Executive Effort and Selection of Risky Projects,” 17(1) The RAND Journal of Economics 77–88.10.2307/2555629Search in Google Scholar
Malcomson, James M. January 2009. “Principal and Expert Agent”, 9(1) The B.E. Journal of Theoretical Economics.10.2202/1935-1704.1528Search in Google Scholar
Malcomson, James M. 2011. “Do Managers with Limited Liability Take More Risky Decisions?”, 20(1) An Information Acquisition Model,” Journal of Economics and Management Strategy 83–120.Search in Google Scholar
Matthews, Steven A. March 2001. “Renegotiating Moral Hazard Contracts Under Limited Liability and Monotonicity,” 97(1) Journal of Economic Theory 1–29.10.1006/jeth.2000.2726Search in Google Scholar
Murphy, Kevin J. 2013. “Executive Compensation: Where We Are, and How We Got There,” in George M. Constantinidis, Milton Harris, and Rene M. Stulz, eds. Handbook of the Economics of Finance, Vol. 2A: Corporate Finance. Elsevier (North Holland), 211–356.10.1016/B978-0-44-453594-8.00004-5Search in Google Scholar
Nowicki, Elizabeth. 2008. “Director Inattention and Director Protection Under Delaware General Corporation Law Section 102(B)(7): A Proposal for Legislative Reform,” 33(3) Delaware Journal of Corporate Law 695–718.Search in Google Scholar
Palomino, Frédéric and Andrea Prat. 2003. “Risk Taking and Optimal Contracts for Money Managers,” 34(1) The RAND Journal of Economics 113–137.10.2307/3087446Search in Google Scholar
Rachlinski, Jeffrey John, Andrew J. Wistrich and Chris Guthrie. 2011. “Probable Cause, Probability, and Hindsight,” 8(S1) Journal of Empirical Legal Studies 72–98.10.1111/j.1740-1461.2011.01230.xSearch in Google Scholar
Raith, Michael. 2008. “Specific Knowledge and Performance Measurement,” 39(4) RAND Journal of Economics 1059–1079.10.1111/j.1756-2171.2008.00050.xSearch in Google Scholar
Spamann, Holger. 2015. “Monetary Liability for Breach of the Duty of Care?,” Harvard Law School John M. Olin Center Discussion Paper No. 835.10.2139/ssrn.2657231Search in Google Scholar
Supreme Court of Delaware. 1984. “Aronson v. Lewis,” Atlantic Reporter, 2d Series, 473, 805–818.Search in Google Scholar
Supreme Court of Delaware. 1985. “Smith v. Van Gorkom,” Atlantic Reporter, 2d Series, 488, 858–899.Search in Google Scholar
Supreme Court of Delaware. 2000. “Brehm v. Eisner,” Atlantic Reporter, 2d Series, 746, 244–268.Search in Google Scholar
Supreme Court of Michigan. 1919. “Dodge v. Ford Motor Co.” Northwestern Reporter, 170, 668–685.Search in Google Scholar
Towers Watson. 2013. “Directors and Officers Liability Survey 2012.”Search in Google Scholar
Trautman, Lawrence J. and Kara Altenbaumer-Price. 2012. “D & O Insurance: A Primer,” 1(2) American University Business Law Review 337–367.Search in Google Scholar
Ulmer, Peter. 2004. “Haftungsfreistellung Bis Zur Grenze Grober Fahrlässigkeit Bei Unternehmerischen Fehlentscheidungen Von Vorstand Und Aufsichtsrat?,” 57(16) Der Betrieb 859–863.Search in Google Scholar
Wagner, Gerhard. 2015. “Officers’ and Directors’ Liability Under German Law – A Potemkin Village,” 16(1) Theoretical Inquiries in Law 69–106.10.1515/til-2015-005Search in Google Scholar
©2017 by De Gruyter
Articles in the same Issue
- The Economics of Scams
- Why Agents Need Discretion: The Business Judgment Rule as Optimal Standard of Care
- Voting Rules in Bankruptcy Law
- A Note on Trial Delay and Social Welfare: The Impact of Multiple Equilibria
- Malice Aforethought
- Weak Law v. Strong Ties: An Empirical Study of Business Investment, Law and Political Connections in China
- Estimating Judicial Ideal Points in Latin America: The Case of Argentina
Articles in the same Issue
- The Economics of Scams
- Why Agents Need Discretion: The Business Judgment Rule as Optimal Standard of Care
- Voting Rules in Bankruptcy Law
- A Note on Trial Delay and Social Welfare: The Impact of Multiple Equilibria
- Malice Aforethought
- Weak Law v. Strong Ties: An Empirical Study of Business Investment, Law and Political Connections in China
- Estimating Judicial Ideal Points in Latin America: The Case of Argentina