Eigenpairs of adjacency matrices of balanced signed graphs
-
Mei-Qin Chen


Abstract
In this article, we study eigenvalues
1 Introduction
In graph theory, a graph
A labeled graph is a graph in which labels are attached to vertices or edges. The system of labeling in this study is a binary labeling of edges using “+” or “−” and graphs with this particular labeling are called signed graphs, and its abbreviation sigraphs is used in some literature [1]. The process of attaching “+” or “−” to the edges is called signing. There are many applications and spectrum properties of signed graphs and weighted signed graphs in the literature: [3,12,14–17,19], just to cite a few.
A path in a graph is an ordered list of vertices and edges of the type
A signed graph is said to be balanced if every cycle is positive. The sign of a cycle is thus the “product” of the signs of its edges, i.e. the product when “+” and “−” are replaced by 1 and
The following theorem given by Harary in 1953 is the first theorem of signed graphs and is fundamental for balanced signed graphs. This theorem is also called Harary’s bipartition theorem later [10].
Theorem 1.1
[11] A signed graph is balanced if and only if its vertex set can be divided into two sets (either of which may be empty), X and Y, so that each edge between the sets is negative and each within a set is positive.
Let
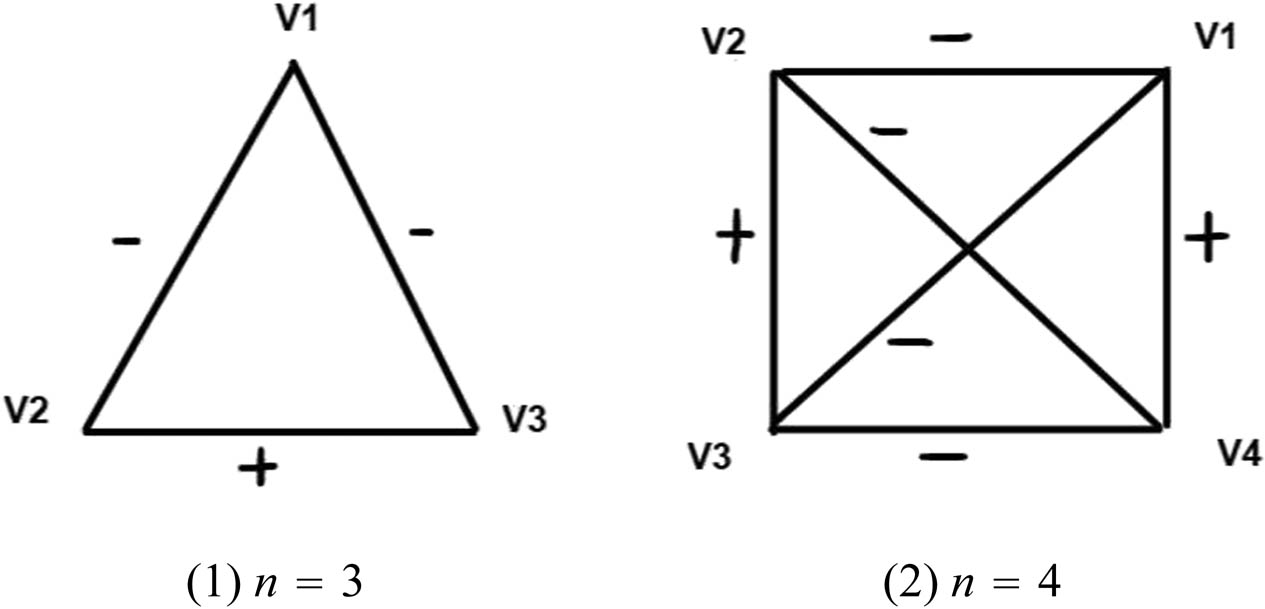
Examples: complete signed graphs.
Let
Let
Theorem 1.1 can also be used to determine whether or not a given graph with a
Procedure to determine if a signed graph G is balanced:
Let
For each row
If
If
Is there another way to check if a given signed graph is balanced? The following two theorems are known as Acharya’s spectra criterion and Stanic’s spectral criterion [1]. Both theorems characterize balanced signed graphs by spectra of graphs.
Theorem 1.2
[1] A signed graph
Theorem 1.3
[10] A signed graph
These two theorems can be used to determine if a given signed graph is balanced by checking the spectra of the adjacency matrices of the signed graph
For this article, we study the eigenvalues of the adjacency matrices of balanced signed completed graphs and their associated eigenvectors, as well as some balanced signed graphs that are not completed but with some special structures. The patterns of the eigenvalues
2 Eigenpairs of adjacency matrices of balanced signed graphs
Let
Two
The following known results will be used in the study:
[13] Two similar matrices have the same eigenvalues. Let
[5] Let
Let
where
What are eigenpairs of the adjacency matrix of a balanced signed graph that is not complete? A signed graph is not complete if there exists at least one pair of vertices that are not adjacent. For a balanced signed graph, vertices that are not adjacent can be in the set

Examples: incomplete signed graphs.
Since all adjacency matrices of balanced and complete signed graphs are similar to
Lemma 2.1
Proof
Let
Now, we study eigenpairs of
| Notation |
|
|
|
|
|
|---|---|---|---|---|---|
| Definition |
|
|
|
|
|
The adjacency matrix of the balanced and complete signed graph associated with
Let
and
Let
and define for
Theorem 2.2
The matrix
Proof
For
Hence,
By Properties (iii), (iv), and (v), we have
So,
Since
i.e.,
□
By the quadratic formula,
In the following table, we list the examples of eigenvalues of
for several choices of
|
|
2 | 3 | 4 |
|---|---|---|---|
| 4 |
|
|
|
|
|
|
||
| 5 |
|
|
|
|
|
|
|
|
| 6 |
|
|
|
|
|
|
|
|
| 7 |
|
|
|
|
|
|
|
Directly from Lemma 2.1, the matrix
3 Eigenpairs of the adjacency matrix of a bipartite graph
In this section, we study eigenpairs of the adjacency matrix of a balanced signed bipartite graph. What is a bipartite graph?
Definition 3.1
A graph is said to be bipartite if its vertices can be divided into two disjoint sets
Since there are no adjacencies between two vertices inside
where

Examples: complete signed bipartite graphs.
What are the eigenpairs of the adjacency matrix of a signed bipartite graph? We first study the eigenpairs of the matrix of the form
where
Lemma 3.2
Let
Proof
Observe that
if and only if both equations
Lemma 3.3
Eigenvalues of
Proof
Let
Note that since
are the eigenpairs of
We say a signed bipartite graph is complete if every vertex in
Observe that
Note that
So,
and define
Theorem 3.4
Let
Proof
Observe that vectors
Hence,
We now find all nonzero eigenvalues of
As given in Lemma 3.2,
are the eigenpairs of
When a balanced signed bipartite graph is not complete, the matrix

Example: incomplete signed bipartite graphs.
What are the eigenpairs of the adjacency matrix for a balanced signed bipartite graph that is not complete? Consider the balanced signed bipartite graphs constructed from the complete ones by removing edges among
where
In the following, we study eigenpairs of a balanced signed bipartite graph whose adjacency matrix

Example: incomplete signed bipartite graphs when
Theorem 3.5
The matrix
and for
where
Proof
The matrix
and
by Lemma 3.2,
are the eigenpairs of
Hence,
for
Though the eigenpairs of
4 Eigenpairs of adjacency matrices of balanced signed graphs
K
k
∘
K
t
In this section, we study the eigenpairs of the adjacency matrices of the signed graphs

Examples: complete
Each
are ones and the rest are zeros, and
Let
Let
For example, when
Let
Theorem 4.1
The matrix
Proof
The proofs of (1), (2), and (3) are directly from the definition of an eigenpair of a matrix.
Since
Since
Since
□
In the following table, we list the examples of eigenvalues of
|
|
2 | 3 | 4 | 5 |
|---|---|---|---|---|
| 4 | (2)
|
(2)
|
(2)
|
(2)
|
| (3)
|
(3)
|
(3)
|
(3)
|
|
| 5 | (2)
|
(2)
|
(2)
|
(2)
|
| (3)
|
(3)
|
(3)
|
(3)
|
The value of
Acknowledgements
The author would like to thank Citadel colleagues Dr. Spencer Hurd and Dr. Rigoberto Florez for bringing to the author questions regarding the eigen properties of balanced signed graphs. The author would also like to thank the reviewers and editor for their valuable comments and suggestions to improve this article.
-
Funding information: This project was supported by the Citedal Foundation Faculty Research Grant.
-
Author contribution: The author confirms the sole responsibility for the conception of the study, presented results and manuscript preparation.
-
Conflict of interest: Author states no conflict of interest.
-
Data availability statement: Data sharing is not applicable to this article as no datasets were generated or analysed during the current study.
References
[1] B. D. Acharya, Spectral criterion for cycle balance in networks, J. Graph Theory 4 (1980), 1–11. 10.1002/jgt.3190040102Search in Google Scholar
[2] B. D. Acharya, S. Arumugarn, and A. Rosa, Labelings of Discrete Structures and Applications, Narosa Publishing House, New Delhi, 2008. Search in Google Scholar
[3] M. Andelić, T. Koledin, and Z. Stanić, A note on the eigenvalue free intervals of some classes of signed threshold graphs, Spec. Matrices 7 (2019), 218–225. 10.1515/spma-2019-0014Search in Google Scholar
[4] D. Cartwright and F. Harary, Structural balance: A generalization of Heider’s theory, Psychol Rev. 63 (1956), 277–293. 10.1037/h0046049Search in Google Scholar PubMed
[5] D. Cvetković, M. Doob, and H. Sachs, Spectra of Graphs, Johann Ambrosius Barth, Heilderberg-Leipzig, 1995. Search in Google Scholar
[6] D. Cvetković, P. Rowlinson, and S. Simić, An Introduction to the Theory of Graph Spectra, Cambridge University Press, Cambridge, 2010. 10.1017/CBO9780511801518Search in Google Scholar
[7] M. Doob, A surprising property of the least eigenvalue of a graph, Linear Algebra Appl. 46 (1982), 1–7. 10.1016/0024-3795(82)90021-0Search in Google Scholar
[8] D. Easley and J. Kleinberg, Networks, Crowds, and Markets: Reasoning about a Highly Connected World, Cambridge University Press, Cambridge, 2010. 10.1017/CBO9780511761942Search in Google Scholar
[9] J. A. Gallian, A dynamic survey of graph labeling, Electron. J. Combin. 5 (1998), Dynamic Survey 6, 43 pp. (Electronic). (Reviewer: Martin Bača). Search in Google Scholar
[10] S. K. Hameed, T. V. Shijin, P. Soorya, K. A. Germina, and T. Zaslavsky, Signed distance in signed graphs, Linear Algebra Appl. 608 (2021), 236–247. 10.1016/j.laa.2020.08.024Search in Google Scholar
[11] F. Harary, On the notion of balance of a signed graph, Michigan Math. J. 2 (1953–1954), 143–146. 10.1307/mmj/1028989917Search in Google Scholar
[12] H. Huang, Induced subgraphs of hypercubes and a proof of the sensitivity conjecture, Ann. Math. (2) 190 (2019), no. 3, 949–955. 10.4007/annals.2019.190.3.6Search in Google Scholar
[13] R. Horn and C. Johnson, Matrix Analysis, Cambridge University Press, Cambridge, 1985. 10.1017/CBO9780511810817Search in Google Scholar
[14] Z. Jiang, J. Tidor, Y. Yao, S. Zhang, and Y. Zhao, Equiangular lines with a fixed angle, Ann. of Math. (2) 194 (2021), no. 3, 729–743. 10.4007/annals.2021.194.3.3Search in Google Scholar
[15] Z. Jiang, J. Tidor, Y. Yao, S. Zhang, and Y. Zhao, Spherical two-distance sets and eigenvalues of signed graphs, Combinatorica 43 (2023), 203–232. 10.1007/s00493-023-00002-1Search in Google Scholar
[16] K. Monfared, G. MacGillivray, D. Olesky, and P. Van Den Driessche, Inertias of Laplacian matrices of weighted signed graphs, Spec. Matrices 7 (2019), 327–342. 10.1515/spma-2019-0026Search in Google Scholar
[17] R. Mulas and Z. Stanić, Star complements for ±2 signed graphs, Spec. Matrices 10 (2022), 258–342266. 10.1515/spma-2022-0161Search in Google Scholar
[18] Z. Stanić, Integral regular net-balanced signed graphs with vertex degree at most four, Ars Math. Contemp. 17 (2019), 103–114. 10.26493/1855-3974.1740.803Search in Google Scholar
[19] Z. Stanić, Walks and eigenvalues of signed graphs, Spec. Matrices 11 (2023), 1–8. 10.1515/spma-2023-0104Search in Google Scholar
[20] S. Strogatz, The Enemy of My Enemy, The New York Times, February 14, 2010. Search in Google Scholar
[21] T. Zaslovsky, A mathematical bibliography of signed and gain graphs and allied areas, Electron. J. Combin. Dynamic Surveys in Combinatorics #DS8, 2018, 1–518.10.37236/29Search in Google Scholar
[22] T. Zaslovsky, Matrices in the theory of signed simpled graphs, Proc. ICDM 2008, RMS-Lecture Notes Series No 3, 2010, pp. 207–229. Search in Google Scholar
© 2024 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- The diameter of the Birkhoff polytope
- Determinants of tridiagonal matrices over some commutative finite chain rings
- The smallest singular value anomaly: The reasons behind sharp anomaly
- Idempotents which are products of two nilpotents
- Two-unitary complex Hadamard matrices of order 36
- Lih Wang's and Dittert's conjectures on permanents
- On a unified approach to homogeneous second-order linear difference equations with constant coefficients and some applications
- Matrix equation representation of the convolution equation and its unique solvability
- Disjoint sections of positive semidefinite matrices and their applications in linear statistical models
- On the spectrum of tridiagonal matrices with two-periodic main diagonal
- γ-Inverse graph of some mixed graphs
- On the Harary Estrada index of graphs
- Complex Palais matrix and a new unitary transform with bounded component norms
- Computing the matrix exponential with the double exponential formula
- Special Issue in honour of Frank Hall
- Editorial Note for the Special Issue in honor of Frank J. Hall
- Refined inertias of positive and hollow positive patterns
- The perturbation of Drazin inverse and dual Drazin inverse
- The minimum exponential atom-bond connectivity energy of trees
- Singular matrices possessing the triangle property
- On the spectral norm of a doubly stochastic matrix and level-k circulant matrix
- New constructions of nonregular cospectral graphs
- Variations in the sub-defect of doubly substochastic matrices
- Eigenpairs of adjacency matrices of balanced signed graphs
- Special Issue - Workshop on Spectral Graph Theory 2023 - In honor of Prof. Nair Abreu
- Editorial to Special issue “Workshop on Spectral Graph Theory 2023 – In honor of Prof. Nair Abreu”
- Eigenvalues of complex unit gain graphs and gain regularity
- Note on the product of the largest and the smallest eigenvalue of a graph
- Four-point condition matrices of edge-weighted trees
- On the Laplacian index of tadpole graphs
- Signed graphs with strong (anti-)reciprocal eigenvalue property
- Some results involving the Aα-eigenvalues for graphs and line graphs
- A generalization of the Graham-Pollak tree theorem to even-order Steiner distance
- Nonvanishing minors of eigenvector matrices and consequences
- A linear algorithm for obtaining the Laplacian eigenvalues of a cograph
- Selected open problems in continuous-time quantum walks
- On the minimum spectral radius of connected graphs of given order and size
- Graphs whose Laplacian eigenvalues are almost all 1 or 2
- A Laplacian eigenbasis for threshold graphs
Articles in the same Issue
- Research Articles
- The diameter of the Birkhoff polytope
- Determinants of tridiagonal matrices over some commutative finite chain rings
- The smallest singular value anomaly: The reasons behind sharp anomaly
- Idempotents which are products of two nilpotents
- Two-unitary complex Hadamard matrices of order 36
- Lih Wang's and Dittert's conjectures on permanents
- On a unified approach to homogeneous second-order linear difference equations with constant coefficients and some applications
- Matrix equation representation of the convolution equation and its unique solvability
- Disjoint sections of positive semidefinite matrices and their applications in linear statistical models
- On the spectrum of tridiagonal matrices with two-periodic main diagonal
- γ-Inverse graph of some mixed graphs
- On the Harary Estrada index of graphs
- Complex Palais matrix and a new unitary transform with bounded component norms
- Computing the matrix exponential with the double exponential formula
- Special Issue in honour of Frank Hall
- Editorial Note for the Special Issue in honor of Frank J. Hall
- Refined inertias of positive and hollow positive patterns
- The perturbation of Drazin inverse and dual Drazin inverse
- The minimum exponential atom-bond connectivity energy of trees
- Singular matrices possessing the triangle property
- On the spectral norm of a doubly stochastic matrix and level-k circulant matrix
- New constructions of nonregular cospectral graphs
- Variations in the sub-defect of doubly substochastic matrices
- Eigenpairs of adjacency matrices of balanced signed graphs
- Special Issue - Workshop on Spectral Graph Theory 2023 - In honor of Prof. Nair Abreu
- Editorial to Special issue “Workshop on Spectral Graph Theory 2023 – In honor of Prof. Nair Abreu”
- Eigenvalues of complex unit gain graphs and gain regularity
- Note on the product of the largest and the smallest eigenvalue of a graph
- Four-point condition matrices of edge-weighted trees
- On the Laplacian index of tadpole graphs
- Signed graphs with strong (anti-)reciprocal eigenvalue property
- Some results involving the Aα-eigenvalues for graphs and line graphs
- A generalization of the Graham-Pollak tree theorem to even-order Steiner distance
- Nonvanishing minors of eigenvector matrices and consequences
- A linear algorithm for obtaining the Laplacian eigenvalues of a cograph
- Selected open problems in continuous-time quantum walks
- On the minimum spectral radius of connected graphs of given order and size
- Graphs whose Laplacian eigenvalues are almost all 1 or 2
- A Laplacian eigenbasis for threshold graphs