Ray tracing-based delay model for compensating gravitational deformations of VLBI radio telescopes
-

 ,
,
,
,

Abstract
The precision and the reliability of very long baseline interferometry (VLBI) depend on several factors. Apart from fabrication discrepancies or meteorological effects, gravity-induced deformations of the receiving unit of VLBI radio telescopes are identified as a crucial error source biasing VLBI products and obtained results such as the scale of a realized global geodetic reference frame. Gravity-induced deformations are systematical errors and yield signal path variations (SPVs). In 1988, Clark and Thomsen derived a VLBI delay model, which was adopted by the International VLBI Service for Geodesy and Astrometry (IVS) to reduce these systematic errors. However, the model parametrizes the SPV by a linear substitute function and considers only deformations acting rotationally symmetrically. The aim of this investigation is to derive the signal path variations of a legacy radio telescope and a modern broadband VGOS-specified radio telescope and to study the effect of nonrotationally symmetric deformation patterns. For that purpose, SPVs are obtained from a nonlinear spatial ray tracing approach. For the first time, a tilt and a displacement of the subreflector perpendicular to the optical axis of the feed unit is taken into account. The results prove the commonly used VLBI delay model as a suitable first-order delay model to reduce gravity-induced deformations.
1 Introduction
Signal path variations (SPVs) of radio telescopes used for very long baseline interferometry (VLBI) significantly limit the achievable accuracy. These variations result from different effects. Apart from fabrication discrepancies or meteorological effects such as wind, snow, or temperature, the receiving components of VLBI radio telescopes are affected by deformations caused by gravity (Baars 2007, Ch. 4.6). In particular, thermal and gravitational deformations cause unidirectional errors and systematically bias the estimated vertical positions of the VLBI radio telescopes (Wresnik et al. 2006, Varenius et al. 2021). Hence, the estimated scale of derived global geodetic reference frames such as the International Terrestrial Reference Frame (ITRF) is affected (Altamimi et al. 2007, 2016). Thermal deformations of the monument mainly affect the vertical component of VLBI radio telescopes and are observable by direct monitoring systems such as invar wire and laser-based instruments or indirectly by temperature measurements (Wresnik et al. 2006, Song et al. 2022). This systematical error is minimized in the routine analysis of geodetic VLBI data by the global thermal expansion model of the International VLBI Service for Geodesy and Astrometry (IVS) (Nothnagel 2008, 2020). Since gravitational deformations of VLBI radio telescopes are identified as a crucial error source biasing terrestrial reference frames, working groups like the IAG/IERS Working Group on Site Survey and Co-location (Bergstrand 2018) and joint research projects such as the international GeoMetre (Pollinger et al. 2022a) project are invited to evaluate proper compensation models as well as to derive the gravitationally induced delay. However, the thermal expansion model was only derived for a few VLBI sites and finally transferred to the whole network, considering gravitational deformations is much more challenging, because current investigations imply an individual VLBI radio telescope dependent deformation behavior (see the contributions by Sarti et al. 2009a, Artz et al. 2014, Nothnagel et al. 2019). For that purpose, the IVS (2019) highlighted the importance of the gravitational deformation and recently adopted the resolution on the “surveys of radio telescopes for modeling of gravitational deformation” (IVS-Res-2019-01).
On the basis of comprehensive investigations on the impact of gravitational deformations at the 26 m VLBI radio telescope in Fairbanks, Alaska, Clark and Thomsen (1988) proposed a VLBI delay model for prime focus VLBI radio telescopes. As shown by Abbondanza and Sarti (2010), this model is readily transferable to secondary focus VLBI radio telescopes and valid for both Gregorian and Cassegrain type VLBI radio telescopes. Following the line of reasoning worked out, Artz et al. (2014) refined the model and provided a complete VLBI delay model for VLBI radio telescopes. Moreover, this model is recommended by the IVS for describing signal path variations with respect to the elevation angle
According to Clark and Thomsen (1988), the VLBI delay model is given by the weighted sum:
where
Equation (1) describes a linear SPV model and only assumes rotationally symmetric deformations (Abbondanza and Sarti 2010, Artz et al. 2014). This greatly simplifies the modeling because the spatial problem is reduced to a projected two-dimensional problem. A slightly different approach was suggested by Bergstrand et al. (2019). However, similar to equation (1), this approach is also based on geometric simplifications and assumes a rotationally symmetric deformation behavior.
This contribution investigates gravity-induced deformations of a legacy VLBI radio telescope as well as of a VGOS-specified radio telescope. For that purpose, the 20 m Radio Telescope Wettzel (RTW) and the southern 13.2 m Twin Telescope Wettzell (TTW-2) were measured by means of close-range photogrammetry at the Geodetic Observatory Wettzell (GOW). Based on these data, the signal path variations are derived including not only rotationally but also nonrotationally symmetric deformation patterns for the first time. The signal path variations for both VLBI radio telescopes are obtained from spatial ray tracing because the commonly used VLBI delay model represented by equation (1) assumes only a rotationally symmetric deformation behavior. Ray tracing is also applied by Artz et al. (2014) to validate the VLBI delay model of the 100 m Effelsberg VLBI radio telescope. However, due to the rotationally symmetric assumption, the authors simplified the spatial problem to a projected two-dimensional problem, and the ray tracing was only applied to a single meridian. Spatial ray tracing is strongly recommended, whenever the rotationally symmetric assumption is unfounded. For instance, Lösler et al. (2018) successfully applied spatial ray tracing to derive the confidence region of the estimated focal area by bootstrapping and kernel density estimation of an elliptical formed ring-focus paraboloid. Following this line of reasoning worked out, ray tracing is applied to the whole receiving unit of VLBI radio telescopes in this investigation.
In Section 2, the spatial ray tracing is introduced. Performing a spatial ray tracing requires a geometrical parameterization of the feed unit of the VLBI radio telescope as well as the telescope-specific illumination function. The mathematical models of the main reflector and the subreflector of the RTW and the TTW-2 are presented in Sections 2.1 and 2.2, respectively. Section 3 deals with the illumination function, which serves as weighting function. The analysis of the data and the obtained results are presented and are discussed in Section 4. The resulting deformations of the main reflectors and the variations of the subreflectors are presented in Sections 4.1 and 4.2, respectively. Finally, the signal path variations are derived in Section 4.3, using the telescope-specific illumination and the measured deformations. Section 5 concludes this investigation.
2 Spatial ray tracing
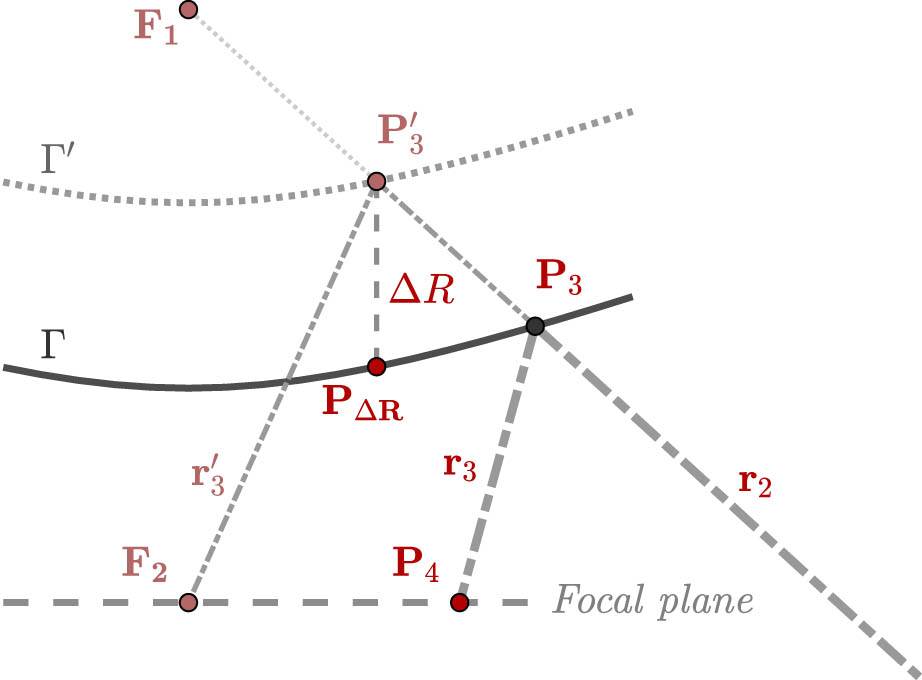
The signal path variations are derived by spatial ray tracing taking not only rotationally but also nonrotationally symmetric deformation patterns into account in this contribution. As shown in Figure 1(a), a rotationally symmetric deformation pattern represents a homologous deformation that only affects datum-independent parameters or shifts along the optical axis. For instance, a uniformly applied scaling of components belongs to this deformation pattern. Applying equation (1) considers only these deformations.

Comparison of rotationally symmetric and nonrotationally symmetric deformation patterns and their impact on the ray path, which is segmented in the segment lengths
Nonrotationally symmetric deformation patterns occur whenever the optical axis of the whole feed unit is not identical to the axis of symmetry of each single component of the feed unit and are depicted in Figure 1(b). This deformation involves, for instance, a displacement or a tilting of a single component. In either case, the form type of the components remains unchanged.
Figure 1 compares rotationally symmetric and nonrotationally symmetric deformation patterns as well as their impact on the ray path. Neuralgic points such as the focal points
For the sake of completeness, there is a third class of deformation pattern that unpredictably deforms the form of components such as local fabrication discrepancies of the reflector surface. Due to their unpredictable character, these deformations are not taken into account in this analysis. It is assumed that this kind of deformation is small and not affecting the SPV significantly. In particular, the panels of the main reflector are stiff designed, and their positions have been validated by the manufacturer at GOW.
The signal path variation is evaluated by numerical integration. Using appropriate step sizes, the SPV is obtained from
where
To derive the SPV, the geometries of the main reflectors as well as the geometries of the subreflectors have to be parameterized. Sections 2.1 and 2.2 present the basic equations to parametrize the main reflector and the subreflector of the RTW and the TTW-2, respectively. Section 2.3 deals with the change
2.1 Radio telescope Wettzell
The 20 m Radio Telescope Wettzell was constructed in the early 1980s and has been in operation since 1983 (Schüler et al. 2015). The RTW is part of the legacy VLBI network and is one of the VLBI radio telescopes with the longest history in geodetic VLBI as well as one of the most engaged station with geodetic VLBI sessions (Neidhardt et al. 2007). The RTW contributes to the IVS and partly other partners such as the European VLBI network (EVN) (Neidhardt et al. 2021).
The main reflector is parameterized by a rotationally symmetric paraboloid, having only one datum-independent form parameter
where vector
Introducing five additional isometric parameters, i.e., three translation parameters
where
The RTW is a Cassegrain type VLBI radio telescope, i.e., the subreflector is located in front of the primary focal point
where
where
Figure 2 depicts a cross-sectional view of a Cassegrain type radio telescope. The incoming ray is reflected by the main reflector toward the subreflector, i.e., in the direction of the joint focal point

A cross-sectional view of a Cassegrain-type VLBI radio telescope with ray paths. The subreflector is implied by a hyperbola, and the main reflector is drawn as a parabola. Physical parts of both reflectors are shown in solid black lines.
Nominal values of the feed unit of the RTW antenna (DOMES: 14201S004)
| Component | Description | Value |
|---|---|---|
| Main reflector | Focal length | 9 m |
| Radius (physical) | 10 m | |
| Separation of mount points | 4.4 m | |
| Subreflector | Distance from vertex to system focal | 2.55 m |
| Radius (physical) | 1.35 m | |
| Radius (illuminated) | 1.32 m | |
| Aperture | Maximum aperture angle |
|
2.2 Twin telescope Wettzell
The Global Geodetic Observing System (GGOS) aims for an accuracy of 1 mm in the position on a global scale, which has not been achieved yet (Rothacher et al. 2009, Plag et al. 2010). To meet these requirements, among others, the existing VLBI network is being extended by a new generation of VLBI radio telescopes (Niell et al. 2006). These telescopes are referred to as VGOS radio telescopes. They are characterized by a more compact and stiffer construction and are designed for broadband reception. As shown in Figure 2, the subreflector of legacy VLBI radio telescopes shadows the surface of the main reflector and, hence, induces a field of decreased intensity (Cutler 1947). To increase the sensitive area of the main reflector, most of the VGOS-specified radio telescopes make use of an improved reflector design known as ring-focus paraboloid.
Since 2013, the GOW operates two VGOS-specified radio telescopes. Both VLBI radio telescopes are identical in construction and are referred to as Twin Telescopes Wettzell (TTW). The northern twin VLBI radio telescope (TTW-1) acts as a legacy S/X station, and the southern TTW-2 contributes to the VGOS network and participates in almost all VGOS and EU-VGOS sessions (Neidhardt et al. 2021). The TTW antennas make use of the improved main reflector design, and both VLBI radio telescopes are equipped with a ring-focus paraboloid.
A rotationally symmetric ring-focus paraboloid integrates a circular cylinder into a rotationally symmetric paraboloid. According to Lösler et al. (2017), the canonical form is expressed by
Here,
are the components of the normalized normal vector
The TTW antennas are Gregorian type VLBI radio telescopes, and the subreflector is located behind the primary focal points

Cross-sectional view of a Gregorian type VLBI radio telescope with ring-focus paraboloid. The subreflector is implied by two tilted ellipses. The main reflector consists of two shifted parabolic arcs. Physical parts of both reflectors are shown in solid black lines.

Cut open spatial wire-frame model of an elliptic spindle torus. The physical part of the torus corresponding to the subreflector of VGOS-specified radio telescopes is depicted in solid.
The first focal point
Nominal values of the feed unit of the TTW antennas (DOMES: 14201S043, 14201S044)
| Component | Description | Value |
|---|---|---|
| Main reflector | Focal length | 3.7 m |
| Radius (physical) | 6.6 m | |
| Radius (illuminated) | 6.4 m | |
| Ring radius | 0.74 m | |
| Separation of mount points | 3.92 m | |
| Subreflector | Distance from vertex to system focal | 3.60296 m |
| Radius (physical/illuminated) | 0.74 m | |
| Aperture | Maximum aperture angle |
|
Let
where
Substituting equation (5) into equation (10) yields an arbitrarily orientated elliptical torus in space. A point
Therefore, the sum of the segment lengths
2.3 Ray path segments
The total path length of a certain ray is obtained by summing up the segment lengths
where
According to Figure 1, the first segment corresponds to the distance between
The second segment describes the distance between the main reflector and the subreflector. The starting point
In Figure 1, the feed horn position indicated by the focal plane is assumed to be fixed with respect to the elevation axis. This is the case for the VLBI radio telescopes at Wettzell. However, if the feed horn is fixed to the vertex, the variation between the feed horn and the elevation axis has to be taken into account by a further segment according to equation (13).
The variation of a certain ray path is given by
where
3 Illumination function
The illumination describes the exploited intensity of the areas of the aperture. This telescope-specific function is usually rotationally symmetric and introduced as a zonal weighting scheme. The illumination function reduces the influence of errors by down weighting regions of low intensity in the outer aperture area (Baars 2007, Ch. 4.2). The normalized illumination function
The mounting of the feed horn of secondary focus VLBI radio telescopes affects the resulting SPV and is parametrized by
As already mentioned, the mount of the feed horn is fixed with respect to the elevation axis, i.e.,
Here,
The resulting extra path length caused by a displacement
As shown in Figure 5, the subreflector is displaced by
The angle of incidence
The factor
Cross-sectional view of a part of the subreflector of a Gregorian type VLBI radio telescope. The unshifted subreflector
Especially for legacy VLBI radio telescopes, the illumination function is often undocumented and has to be reconstructed from discrete samples. Samples can be determined, for instance, by discrete measurements, by simulations, or by beam diagrams. Suitable functions to model the illumination are evaluated by Abbondanza and Sarti (2010). Since the best approximation of the field radiated by a circular feed horn is a Gaussian beam, the authors highly recommend a Gaussian function, see the contribution by Abbondanza and Sarti (2010) and the references inside.
Figure 6 depicts the discrete amplitude sample points of the RTW and the TTW-2, respectively. According to the recommendation given by Abbondanza and Sarti (2010), a common Gaussian function, i.e.,
with coefficients

Estimated amplitude functions. Red dots denote the amplitude samples of the RTW (a) and the TTW-2 (b), respectively. The related Gaussian functions are depicted in red.
Estimated coefficients of the telescope-specific illumination functions as well as the integration limits for the RTW and the TTW-2
| Parameter | RTW | TTW-2 |
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
To serve as a weighting function of the full aperture, the illumination function has to be transferred to decimal units and to be normalized using the normalization factor
where
and the weights of the VLBI delay model given by equation (1) are obtained from equation (16).
Table 4 summarizes the resulting weighting coefficients for both VLBI radio telescopes under investigation. The largest weights
Weights of the VLBI delay model for the RTW and the TTW-2
| Telescope | DOMES |
|
|
|
|---|---|---|---|---|
| RTW | 14201S004 |
|
|
+1.05 |
| TTW-2 | 14201S044 |
|
+0.73 | +0.64 |
The focal length variation
4 Analysis and results
To measure deformations at VLBI radio telescopes, several methods have been evaluated, especially in the last decade. Holography (Nikolic et al. 2007, Hunter et al. 2011), close-range photogrammetry (Shankar et al. 2009, Lösler et al. 2019), and polar measurement systems such as laser scanners (Bleiders 2020, Salas et al. 2022) or laser trackers (Fu et al. 2015) have been successfully applied to investigate gravitational deformations of VLBI radio telescopes. For a survey of techniques, the interested reader is referred to Baars (2007, Ch. 6). Regardless of the used measurement method, the observed points as well as the related dispersion matrix are treated as incoming data to study the deformation behavior of VLBI radio telescopes.
In this contribution, data sets obtained from close-range photogrammetry using an unmanned aerial vehicle (UAV) are investigated. The data were acquired during a measurement campaign at GOW in the fall of 2021. The RTW and the TTW-2 were measured from 10° to 90° in elevation using a step-size of 10°. For the RTW, an additional experiment was performed at ε = 5°. Each data set refers to a specific elevation position and consists of observed points located at the main reflector, at the backside of the subreflector, and at construction elements such as the tube or the support struts, see Table 5. The number of glued targets depends on the dimension of the components of the receiving unit (see Tables 1 and 2), and, therefore, varies between both telescopes under investigation. Figure 7 shows the prepared TTW-2 that was equipped with discrete black and white coded targets. The UAV carrying the photogrammetric camera is visible in front of the TTW-2 main reflector.

Unmanned aerial vehicle in front of the prepared VGOS radio telescope TTW-2, which is equipped with photogrammetric targets at the receiving unit.
Number of observed points at the RTW and the TTW-2
| Component | RTW | TTW-2 |
|---|---|---|
| Main reflector | 169 | 112 |
| Subreflector | 6 | 10 |
| Tube | 16 | 36 |
| Support struts | 44 | 0 |
The observed points and the related fully populated dispersion matrix are obtained from a bundle adjustment using the in-house software package JAiCov (JAiCov 2021). During the bundle adjustment, the data sets were scaled uniformly to the reference temperature T 0 = 7.8°C used in VLBI data analysis (Nothnagel 2008), to obtain comparable and combinable results.
The deformations of the main reflectors and the subreflectors are addressed in Sections 4.1 and 4.2. The resulting signal path variations are presented in Section 4.3. Hereafter, subscripts R and T indicate the results of the RTW and the TTW-2, respectively.
4.1 Main reflector deformations
The ten data sets acquired at the RTW as well as the nine data sets from the TTW-2 are analyzed individually. The parameters of the main reflector are adjusted by means of least-squares treating the points observed at the main reflector surface as observations. The functional model introduced for the RTW and TTW-2 is given by equations (3) and (8), respectively. The stochastic model results from the fully populated dispersion matrix of the observed surface points. Since the points were marked by glued-on targets, the thickness of the targets
The estimated focal lengths

Estimated focal lengths
These discrete focal lengths are adapted by a common sine function given by
which is depicted in black together with the related 95% confidence interval in Figure 8. The standard deviations of the coefficients, i.e., the shift, the amplitude, and the damping factor, are 0.9 mm, 4.6 mm, and 0.37, respectively.
For
Figure 9 depicts the estimated focal lengths

Estimated focal lengths
An adapted cosine function is applied to predict the focal length variations of the TTW-2. The determined prediction function reads
and is depicted in black together with the related 95% confidence interval in Figure 9. The standard deviations of the coefficients, i.e., the shift and the amplitude, are 0.3 mm and 0.4 mm, respectively.
Similar to the RTW, the focal length increases with the increasing elevation. However, the maximum variation of about 1 mm is considerably smaller than for the RTW, but is comparable to the value reported for a VGOS-specified radio telescope at the Onsala Space Observatory (Lösler et al. 2019). The estimated focal length at
As indicated in Figure 1(a), the vertex position
where
4.2 Subreflector variations
The variations of the subreflector are investigated using the positions of targets glued on the backside of the subreflector, see Table 5. The subreflector itself is assumed to be stiff and untwisted due to its small size compared to the main reflector.
The mounting of the subreflector differs for both telescopes. Although the quadrupod of the RTW holding the subreflector is fixed in construction, the subreflector of the TTW-2 is equipped with a so-called hexapod. The hexapod mechanically compensates for defocused optics caused by gravitational deformations by spatially shifting and rotating the subreflector (Schüler et al. 2015). In geodetic VLBI, the subreflector is kept fixed, and the hexapod of the TTW-2 is set to inactive. To verify the consistency of the mechanical compensation with respect to the VLBI delay model, the TTW-2 was observed with active hexapod and with fixed hecapod.
4.2.1 RTW subreflector variations
Beside the focal length

Estimated distances between the vertex of the main reflector and the projected position of the mounted targets at the subreflector with respect to
The variations clearly depend not only on the elevation angle but also on the target position. Almost identical values can be found for the points 459 and 460, for the points 427 and 455, as well as for the points 428 and 454. Moreover, the variations of the points 428 and 454 are negative but almost identical in magnitude to those of the points 427 and 455.
Figure 11 shows the configuration of the six targets at the backside of the subreflector. The points 427, 428, 454, and 455 are symmetrically distributed with respect to the horizontal central axis. Although positive variations are obtained for the points that are located below this axis, negative values result from the points located above this axis. For that reason, the variations depicted in Figure 10 result from a small shift overlaid by an additional tilt of the subreflector. Moreover, the horizontal central axis is close to the tiling axis.

Target positions at the backside of the subreflector of the RTW. The center of the subreflector is indicated by
The center of the subreflector
and is depicted in black together with the related 95% confidence interval. The estimated standard deviation of the amplitude is 0.2 mm.

Estimated shift values
A tilt of the subreflector describes the vertical angular deviation between the symmetry axes of the subreflector and the main reflector. It belongs to the class of nonrotationally symmetric deformation patterns. For the Medicina VLBI radio telescope, a tilt of the quadrupod holding the subreflector was reported by Sarti et al. (2009a). However, the tilt was not considered within the VLBI delay model by the authors.
Assuming an untwisted subreflector, the normal vector of the plane defined by the six targets at the backside is an appropriate approximation of the axis of symmetry of the subreflector to investigate the relative tilt of the subreflector. Figure 13 depicts the derived angular deviations
and is depicted in black together with the related 95% confidence interval. The estimated standard deviation of the amplitude is

Estimated tilts
Another nonrotationally symmetric deformation pattern results from a shift
are shown in Figure 14. The estimated standard deviation of the amplitude is 3.4 mm.

Estimated shift values
The displacement
4.2.2 TTW-2 subreflector variations
The TTW-2 is equipped with a movable hexapod holding the subreflector to mechanically compensate for gravity-induced deformations. For that reason, the variations of the subreflector are investigated for the case of a fixed subreflector as well as for the case of an active subreflector. Hereafter, superscripts f and a indicate the configuration with fixed and active subreflector, respectively.
Similar to the RTW, the variations are obtained from mounted targets at the backside of the subreflector. These targets are symmetrically distributed at the subreflector. A best-fit plane is adjusted, and the intersection point of the plane and the axis of symmetry of the main reflector is determined. The variation
Figure 15 depicts the estimated shift values
and are shown in black. Here,

Estimated shift values
The normal vector of the estimated plane is an appropriate approximation of the axis of symmetry of the subreflector and indicates the relative tilt of the subreflector with respect to the axis of symmetry. The angular derivations
are depicted in black together with the related 95% confidence interval. The standard deviation of the estimated amplitudes is almost identical and reads

Estimated tilts
In case of a fixed subreflector, the amplitude is only about
The tilt of the subreflector belongs to the class of nonrotationally symmetric deformation patterns. Due to the small angles and the short distance between the subreflector and the system focal point
A further nonrotationally symmetry deformation pattern is the displacement
are depicted in Figure 17. The standard deviation of the estimated amplitudes reads 0.7 mm. The dependency between

Estimated shift values
4.2.3 Verification of TTW-2 subreflector variations
The detected variations
These obtained variations strongly depend on the reliability of the derived axis of symmetry of the main reflector. In this investigation, the axis results from the adjustment of the main reflector, and is the best approximation of the true optical axis from the available data. The realized optical axis can be different from the reference axis used by the manufacturer and explains the overcompensation. For instance, the reference axis can also be defined by other construction elements of the feed unit like the tube axis, and, thus, may differ from the estimated axis of symmetry of the main reflector.
Independently of the reference axis used, the differences between the measured values of both configurations can be compared to the induced correction values of the manufacturer. The applied correction functions are industrial secret, but the resulting function values are available from the control panel of the TTW-2.
Figure 18 depicts the estimated variations obtained from the differences between the configuration with active and fixed subreflector by green dots. These differences are unaffected by gravitational deformations and describe the changes in position and orientation of the subreflector induced by the manufacturer. The related 95% confidence intervals result from the propagation of uncertainty. The applied correction values of the manufacturer with respect to

Verification of the estimated variations (green dots) of the subreflector of the TTW-2 with respect to the correction values applied by the manufacturer (black dash-dotted line). (a) Verification of the shift values
4.3 Signal path variations
The aim of this investigation is to derive the signal path variations of a legacy VLBI radio telescope and a VGOS-specified radio telescope and to study the effect of nonrotationally symmetric deformation patterns. The common VLBI delay model derived by Clark and Thomsen (1988) parametrizes the SPV by a linear substitute function and considers only rotationally symmetric acting deformations. For that reason, we resort to the spatial ray tracing approach, which allows a rigorous combination of any kind of modelable deformation behavior.
According to equation (2), the SPV is evaluated by numerical integration, where
The determined prediction functions and also the spatial ray tracing itself are nonlinear problems. Applying a linearized substitute problem to the nonlinear problem biases the estimates, because the statistical properties of linear models cannot be passed to the nonlinear case as shown by Lösler et al. (2021). The Monte-Carlo simulation is known to be an asymptotically unbiased estimator as the sample size
Applying spatial ray tracing yields the red colored signal path variations of the RTW depicted in Figure 19. The light red colored error band indicates the 95% confidence interval. For comparison, the result of the VLBI delay model given by equation (1) is presented in dash-dotted style and light gray colored error band.

Estimated signal path variations
The tilt of the subreflector and the displacement of the subreflector perpendicular to the optical axis have only a minor impact onto the SPV, because both approaches yield comparable results, and the deviations are less than 0.2 mm. The maximum signal path variation is about 3.5 mm and corresponds to a time delay of about 12 ps. The maximum standard deviation is about 0.6 mm.
The signal path variations of the TTW-2 are determined for both the configuration with a fixed subreflector and the configuration with an active subreflector and are shown in Figure 20. Figure 20(a) depicts the results of the estimated SPV for the configuration with a fixed subreflector as used in regular geodetic VLBI. The result of the spatial ray tracing is given by a blue line with dots. The corresponding light blue error band indicates the 95% confidence interval. The results of the VLBI delay model are depicted by a black dash-dotted curve. The corresponding 95% confidence interval is given by the light gray colored error band. The difference between the results is less than 0.2 mm, and both approaches yield almost comparable results. Thus, the SPV is less affected by a tilt of the subreflector or a displacement of the subreflector perpendicular to the optical axis. The range of the signal path variations is about 0.9 mm and corresponds to a time delay of about 3 ps. The maximum standard deviation is 0.7 mm.

Estimated signal path variations
The resulting SPV of the TTW-2 for the configuration with active subreflector is shown in Figure 20(b). The result of the spatial ray tracing is shown in orange. The black dash-dotted curve depicts the SPV of the VLBI delay model. Error bands indicate the related 95% confidence intervals. The maximum standard deviation is 0.7 mm.
The differences between the SPV obtained from the spatial ray tracing and the SPV derived from the VLBI delay model are quite small. Both approaches yield almost comparable results. The tilt of the subreflector and the displacement of the subreflector perpendicular to the optical axis have only a minor impact onto the SPV. Therefore, the commonly used VLBI delay model is a suitable first-order delay model for legacy VLBI radio telescopes as well as for VGOS-specified radio telescopes and reduces the impact of the main gravitational-related error sources.
The maximum signal path variation of the active subreflector configuration is about
Varenius et al. (2021) studied the impact of signal path variations onto the station coordinates of the legacy 20 m VLBI radio telescope and the 13.2 m VGOS-specified twin radio telescopes at the Onsala Space Observatory. Although the horizontal components of the station coordinates are almost unaffected, the changes in the vertical component coincide with the obtained signal-path variations. According to this finding, the difference of about 0.2 mm between the SPV obtained from spatial ray tracing and the SPV derived from the VLBI delay model affects the vertical component of the station coordinate within the same order of magnitude.
5 Conclusion
The deformation behavior of the feed unit of radio telescopes used for VLBI affects the signal path length and limits the achievable accuracy in VLBI products. Apart from fabrication discrepancies or meteorological effects, gravitationally induced deformations are identified as a crucial error source that systematically distorts the estimated vertical position of VLBI radio telescopes and, hence, biases the scale of the derived global geodetic reference frame (Altamimi et al. 2016). For that reason, working groups such as the IAG/IERS Working Group on Site Survey and Co-location (Bergstrand 2018) or joint research projects like the international GeoMetre (Pollinger et al. 2022b) project have been encouraged to investigate on gravitational deformations of VLBI radio telescopes to compensate for the systematic errors. Investigations on the deformations caused by gravity performed at several VLBI radio telescopes imply an individual VLBI radio telescope-dependent deformation behavior (see the contributions by Sarti et al. 2009a, Artz et al. 2014, Nothnagel et al. 2019). For that reason, each VLBI radio telescope or at least each type of VLBI radio telescope has to be investigated individually (Lösler et al. 2019).
The data sets used in this investigation were obtained during a measurement campaign in the fall of 2021. Mounted targets at the main reflector surface and the backside of the subreflector of the legacy 20 m VLBI Radio Telescope Wettzell as well as the southern 13.2 m Twin Telescope Wettzell were measured in several elevation positions by means of close-range photogrammetry using an unmanned aerial vehicle. Each data set consisting of the target positions and the related fully populated dispersion matrix was treated as incoming data to determine the elevation dependent path lengths.
The aim of this contribution was to study the SPV of the legacy 20 m VLBI Radio Telescope Wettzell as well as the southern 13.2 m Twin Telescope Wettzell. For the first time, the impact of nonrotationally symmetric deformation patterns onto the signal path variations were investigated. For that purpose, a spatial ray tracing procedure was introduced because the commonly used linear VLBI delay model considers only rotationally symmetric deformations. Spatial ray tracing is strongly recommended, whenever the rotationally symmetric assumption is unfounded (Lösler et al. 2018). The focal length variation
The maximum signal path variation of the RTW obtained from spatial ray tracing is about 3.5 mm and corresponds to a time delay of about 12 ps. Although the RTW is equipped with a fixed quadrupod holding the subreflector, the TTW-2 has a movable hexapod that allows for a mechanical compensation of gravitationally induced deformations. To validate the compatibility of the mechanical compensation with the VLBI delay model, the TTW-2 was measured in two configurations. In the first configuration, the subreflector was kept fixed as it is used in regular geodetic VLBI. In the second configuration, the hexapod actively compensated for deformations caused by gravity and the subreflector was moved with respect to the elevation position of the TTW-2. Due to the compact and stiffer design of VGOS-specified radio telescopes, the SPV of these telescopes are less affected by gravitationally induced deformations. For the configuration with fixed subreflector, the range of the signal path variation is about 0.9 mm and corresponds to a time delay of about 3 ps. However, the maximum signal path variation increases, if the hexapod actively compensates for deformations. Although the active hexapod mainly compensates for gravitationally induced deformations of the subreflector, the intent of the VLBI delay model as well as the spatial ray tracing is to model the total SPV of the feed unit taking interdependencies of overlaying deformations into account. For that reason, both approaches have different intents and are incompatible.
The SPV obtained from spatial ray tracing was opposed to the results derived from the VLBI delay model. Both approaches yield almost comparable results. For that reason, the tilt of the subreflector and the displacement of the subreflector perpendicular to the optical axis have only a minor impact onto the SPV. The commonly used VLBI delay model is a suitable first-order delay model for legacy VLBI radio telescopes as well as for VGOS-specified radio telescopes and reduces the impact of the main gravitational related error sources.
-
Funding information: This project 18SIB01 GeoMetre (2020) has received funding from the EMPIR programme co-financed by the Participating States and from the European Union’s Horizon 2020 research and innovation programme.
-
Conflict of interest: The authors declare no conflict of interest.
-
Data availability statement: The data sets analyzed during the current study are available from the repository at https://doi.org/10.5281/zenodo.7110033.
References
Abbondanza, Z. and X. Sarti. 2010. “Effects of illumination functions on the computation of gravity-dependent signal path variation models in primary focus and Cassegrainian VLBI telescopes.” Journal of Geodesy 84(8), 515–25, https://doi.org/10.1007/s00190-010-0389-z. Search in Google Scholar
Altamimi, Z., X. Collilieux, J. Legrand, B. Garayt, and C. Boucher. 2007. “ITRF2005: A new release of the international terrestrial reference frame based on time series of station positions and Earth orientation parameters.” Journal of Geophysical Research 112(B09401), 1–19, https://doi.org/10.1029/2007jb004949. Search in Google Scholar
Altamimi, Z., P. Rebischung, L. Métivier, and X. Collilieux. 2016. “ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions.” Journal of Geophysical Research: Solid Earth 121(8), 6109–31, https://doi.org/10.1002/2016jb013098. Search in Google Scholar
Artz, T., A. Springer, and A. Nothnagel. 2014. “A complete VLBI delay model for deforming radio telescopes: the Effelsberg case.” Journal of Geodesy 88(12), 1145–61, https://doi.org/10.1007/s00190-014-0749-1. Search in Google Scholar
Baars, J. W. M. 2007. “The paraboloidal reflector antenna in radio astronomy and communication - theory and practice.” Number 348 in Astrophysics and Space Science Library. New York: Springer, https://doi.org/10.1007/978-0-387-69734-5. Search in Google Scholar
Bergstrand, S. 2018. “Working group on site survey and co-location.” In: IERS Annual Report 2017, edited by W. R. Dick and D. Thaller, International Earth Rotation and Reference Systems Service (IERS), Frankfurt am Main, pp. 160–1. Search in Google Scholar
Bergstrand, S., M. Herbertsson, C. Rieck, J. Spetz, C.-G. Svantesson, and R. Haas. 2019. “A gravitational telescope deformation model for geodetic VLBI.” Journal of Geodesy 93(5), 669–80, https://doi.org/10.1007/s00190-018-1188-1. Search in Google Scholar
Bleiders, M. 2020. “Electromagnetic model of dual reflector radio telescope based on laser scanning survey.” In: 2020 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), pp. 217–21, vol. 1, Riga, Latvia: IEEE. https://doi.org/10.1109/mttw51045.2020.9245071. Search in Google Scholar
Bronshtein, I. N., K. A. Semendyayev, G. Musiol, and H. Muehlig. 2007. Handbook of mathematics. 5th ed. Berlin, Heidelberg: Springer. https://doi.org/10.1007/978-3-540-72122-2. Search in Google Scholar
Carlton, M. A. and J. L. Devore. 2017. Probability with Applications in Engineering, Science, and Technology. 2nd ed, Cham: Springer. https://doi.org/10.1007/978-3-319-52401-6. Search in Google Scholar
Clark, T. A. and P. Thomsen. 1988. Deformations in VLBI Antennas. Techreport NASA-TM-100696, NASA, NASA Goddard Space Flight Center, Greenbelt, MD, United States. Search in Google Scholar
Cutler, C. C. 1947. “Parabolic-Antenna design for microwaves.” Proceedings of the IRE 35(11), 1284–94. https://doi.org/10.1109/jrproc.1947.233571. Search in Google Scholar
Dutescu, E., O. Heunecke, and K. Krack. 1999. “Formbestimmung bei Radioteleskopen mittels Terrestrischem Laserscanning.” avn 106(6), 239–45. Search in Google Scholar
Fu, L., G. Liu, C. Jin, F. Yan, T. An, and Z. Shen. 2015. “Surface accuracy analysis of single panels for the Shanghai 65-M radio telescope.” WSEAS - Transactions on Applied and Theoretical Mechanics 10(6), 54–61. Search in Google Scholar
GeoMetre. 2020. Large-Scale Dimensional Measurements for Geodesy - A Joint Research Project within the European Metrology Research Programme EMPIR, Grant Number: 18SIB01. https://doi.org/10.13039/100014132. Search in Google Scholar
Greiwe, A., R. Brechtken, M. Lösler, C. Eschelbach, and R. Haas. 2020. “Erfassung der Hauptreflektordeformation eines Radioteleskops durch UAV-gestützte Nahbereichsphotogrammetrie.” In: 40. Wissenschaftlich-Technische Jahrestagung der DGPF, vol. 29 of Wissenschaftlich-Technische Jahrestagung der DGPF, edited by T. P. Kersten, Deutsche Gesellschaft Photogrammetrie, Fernerkundung und Geoinformation e.V. pp. 346–57. Search in Google Scholar
Holst, C., D. Schunck, A. Nothnagel, R. Haas, L. Wennerbäck, H. Olofsson, R. Hammargren, and H. Kuhlmann. 2017. “Terrestrial laser scanner two-face measurements for analyzing the elevation-dependent deformation of the onsala space observatory 20-m radio telescopeas main reflector in a bundle adjustment.” Sensors 17(8, 1833), 1–21. https://doi.org/10.3390/s17081833. Search in Google Scholar PubMed PubMed Central
T. R. Hunter, F. R. Schwab, S. D. White, J. M. Ford, F. D. Ghigo, R. J. Maddalena, B. S. Mason, J. D. Nelson, R. M. Prestage, J. Ray, P. Ries, R. Simon, S. Srikanth, and P. Whiteis. 2011. “Holographic measurement and improvement of the green bank telescope surface.” Publications of the Astronomical Society of the Pacific 123(907), 1087–99. https://doi.org/10.1086/661950. Search in Google Scholar
IVS. 2019. Surveys of radio telescopes for modeling of gravitational deformation (IVS-Res-2019-01). https://ivscc.gsfc.nasa.gov/about/resolutions/IVS-Res-2019-01-TelescopeSurveys.pdf. Search in Google Scholar
JAiCov. 2021. Java Aicon Covariance matrix - Bundle Adjustment for Close-Range Photogrammetry. https://github.com/applied-geodesy/bundle-adjustment. Search in Google Scholar
Lösler, M. 2021. Modellbildungen zur Signalweg- und in-situ Referenzpunktbestimmung von VLBI-Radioteleskopen. PhD thesis, Technische Universitüt Berlin, Institute of Geodesy and Geoinformation Science, Geodesy and Adjustment Theory, Berlin. https://doi.org/10.14279/depositonce-11364. Search in Google Scholar
Lösler, M., C. Eschelbach, and R. Haas. 2017. “Unified model for surface fitting of radio telescope reflectors.” In: Proceedings of the 23rd European VLBI for Geodesy and Astrometry (EVGA) Working Meeting, edited by R. Haas and G. Elgered, Gothenburg, pp. 29–34. Search in Google Scholar
Lösler, M., C. Eschelbach, and R. Haas. 2018. “Bestimmung von Messunsicherheiten mittels Bootstrapping in der Formanalyse.” zfv 143(4), 224–32, https://doi.org/10.12902/zfv-0214-2018. Search in Google Scholar
Lösler, M., R. Haas, C. Eschelbach, and A. Greiwe. 2019. “Gravitational deformation of ring-focus antennas for VGOS - first investigations at the Onsala twin telescopes project.” Journal of Geodesy 93(10), 2069–87. https://doi.org/10.1007/s00190-019-01302-5. Search in Google Scholar
Lösler, M., R. Lehmann, F. Neitzel, and C. Eschelbach. 2021. “Bias in least-squares adjustment of implicit functional models.” Survey Review 53(378), 223–34. https://doi.org/10.1080/00396265.2020.1715680. Search in Google Scholar
Neidhardt, A., G. Kronschnabl, and R. Schatz. 2007. “Fundamentalstation Wettzell - 20m Radiotelescope.” In: 2006 Annual Report, International VLBI Service for Geodesy and Astrometry, edited by D. Behrend and K. D. Baver, vol. 143, pp. 114–7. NASA/TP-2007-214151, NASA. Search in Google Scholar
Neidhardt, A., C. Plötz, G. Kronschnabl, M. Hohlneicher, and T. Schüler. 2021. “Geodetic observatory Wettzell: 20-m radio telescope and twin radio telescopes.” In: International VLBI Service for Geodesy and Astrometry 2019+2020 Biennial Report, edited by D. Behrend, K. L. Armstrong, and K. D. Baver, pp. 120–4. NASA/TP-20210021389, NASA. Search in Google Scholar
Niell, A., A. Whitney, B. Petrachenko, W. Schlöter, N. Vandenberg, H. Hase, et al. 2006. “VLBI2010: Current and future requirements for geodetic VLBI systems.” In: IVS Annual Report 2005, edited by D. Behrend and K. D. Baver, pp. 13–40. NASA/TP-2006-214136, NASA. Search in Google Scholar
Nikolic, B., R. M. Prestage, D. S. Balser, C. J. Chandler, and R. E. Hills. 2007. “Out-of-focus holography at the green bank telescope.” Astronomy and Astrophysics 465(2), 685–93. https://doi.org/10.1051/0004-6361:20065765. Search in Google Scholar
Nothnagel, A. 2008. “Conventions on thermal expansion modelling of radio telescopes for geodetic and astrometric VLBI.” Journal of Geodesy 83(8), 787–92. https://doi.org/10.1007/s00190-008-0284-z. Search in Google Scholar
Nothnagel, A. 2020. “Very long baseline interferometry.” In: Mathematische Geodäsie/Mathematical Geodesy, Springer Reference Naturwissenschaften, edited by W. Freeden and R. Rummel, pp. 1257–314 Berlin, Heidelberg: Springer. https://doi.org/10.1007/978-3-662-55854-6_110. Search in Google Scholar
Nothnagel, A., T. Artz, D. Behrend, and Z. Malkin. 2017. “International VLBI service for Geodesy and Astrometry: Delivering high-quality products and embarking on observations of the next generation.” Journal of Geodesy 91(7), 711–21. https://doi.org/10.1007/s00190-016-0950-5. Search in Google Scholar
Nothnagel, A., C. Holst, and R. Haas. 2019. “A VLBI delay model for gravitational deformations of the Onsala 20 m radio telescope and the impact on its global coordinates.” Journal of Geodesy 93(10), 2019–36. https://doi.org/10.1007/s00190-019-01299-x. Search in Google Scholar
Plag, H.-P., C. Rizos, M. Rothacher, and R. Neilan. 2010. “The global geodetic observing system (GGOS): Detecting the fingerprints of global change in geodetic quantities.” In Advances in Earth Observation of Global Change, edited by E. Chuvieco, J. Li, and X. Yang, pp. 125–43 Heidelberg: Springer. https://doi.org/10.1007/978-90-481-9085-0_10. Search in Google Scholar
Pollinger, F., S. Baselga, C. Courde, C. Eschelbach, L. García-Asenjo, P. Garrigues, J. Guillory, P. O. Hedekvist, T. Helojärvi, J. Jokela, U. Kallio, T. Klügel, P. Köchert, M. Lösler, R. Luján, T. Meyer, P. Neyezhmakov, D. Pesce, M. Pisani, M. Poutanen, G. Prellinger, A. Röse, J. Seppä, D. Truong, R. Underwood, K. Wezka, J.-P. Wallerand, and M. Wiśniewski. 2022a. “The European GeoMetre project - developing enhanced large-scale dimensional metrology for geodesy.” In: 5th Joint International Symposium on Deformation Monitoring (JISDM). Valencia, Spain. 10.1007/s12518-022-00487-3Search in Google Scholar
Pollinger, F., C. Courde, C. Eschelbach, L. V. García-Asenjo, J. Guillory, P. O. Hedekvist, U. Kallio, T. Klügel, P. Neyezhmakov, D. Pesce, M. Pisani, J. Seppä, R. Underwood, K. Wezka, and M. Wiśniewski. 2022b. “Large-scale dimensional metrology for geodesy - first results from the European GeoMetre project.” In: Proceedings of the 2021 IAG Symposium on Geodesy for a Sustainable Earth, edited by J. T. Freymueller and L. Sánchez, International Association of Geodesy Symposia, Heidelberg, Berlin: Springer. 10.1007/1345_2022_168.Search in Google Scholar
Rothacher, M., G. Beutler, D. Behrend, A. Donnellan, J. Hinderer, C. Ma, C. Noll, J. Oberst, M. Pearlman, H.-P. Plag, B. Richter, T. Schöne, G. Tavernier, and P. L. Woodworth. 2009. “The future global geodetic observing system.” In: Global Geodetic Observing System - Meeting the Requirements of a Global Society on a Changing Planet in 2020, pp. 237–72, edited by H.-P. Plag and M. Pearlman, Berlin, Heidelberg: Springer. https://doi.org/10.1007/978-3-642-02687-4_9. Search in Google Scholar
Rubinstein, R. Y. and D. P. Kroese. 2017. Simulation and the Monte Carlo Method. 3rd ed. Wiley Series in Probability and Statistics. Hoboken, New Jersey: John Wiley & Sons, Inc., https://doi.org/10.1002/9781118631980. Search in Google Scholar
Salas, P., P. Marganian, J. Brandt, J. Shelton, N. Sharp, L. Jensen, M. Bloss, C. Beaudet, D. Egan, N. Sizemore, D. T. Frayer, A. Seymour, F. R. Schwab, and F. J. Lockman. 2022. “Evaluating a strategy for measuring deformations of the primary reflector of the Green Bank telescope using a terrestrial laser scanner.” Advanced Control for Applications 4(1), 1–16, https://doi.org/10.1002/adc2.99. Search in Google Scholar
Sarti, P., C. Abbondanza, and L. Vittuari. 2009a. “Gravity-dependent signal path variation in a large VLBI telescope modelled with a combination of surveying methods.” Journal of Geodesy 83(11), 1115–26, https://doi.org/10.1007/s00190-009-0331-4. Search in Google Scholar
Sarti, P., L. Vittuari, and C. Abbondanza. 2009b. “Laser scanner and terrestrial surveying applied to gravitational deformation monitoring of large VLBI telescopes’ primary reflector.” 135(4), 136–48, https://doi.org/10.1061/(asce)su.1943-5428.0000008. Search in Google Scholar
Schüler, T., G. Kronschnabl, C. Plötz, A. Neidhardt, A. Bertarini, S. Bernhart, L. Porta, S. Halsig, and A. Nothnagel. 2015. “Initial results obtained with the first TWIN VLBI radio telescope at the geodetic observatory Wettzell.” Sensors 15(8), 18767–800, https://doi.org/10.3390/s150818767. Search in Google Scholar PubMed PubMed Central
Schuh, H. and D. Behrend. 2012. “VLBI: A fascinating technique for geodesy and astrometry.” Journal of Geodynamics 61, 68–80, https://doi.org/10.1016/j.jog.2012.07.007. Search in Google Scholar
Shankar, N. U., R. Duraichelvan, C. M. Ateequlla, A. Nayak, A. Krishnan, M. K. S. Yogi, C. K. Rao, K. Vidyasagar, R. Jain, P. Mathur, K. V. Govinda, R. B. Rajeev, and T. L. Danabalan. 2009. “Photogrammetric measurements of a 12-metre preloaded parabolic dish antenna.” In: National Workshop on the Design of Antenna & Radar Systems (DARS), ISRO Telemetry Tracking and Command Network (ISTRAC), Bengaluru, pp. 1–12. Search in Google Scholar
Song, S., Z. Zhang, G. Wang, and Y. Zheng. 2022. “Investigations of thermal deformation based on the monitoring system of Tianma 13.2 m VGOS telescope.” Research in Astronomy and Astrophysics 22(9), 095003, https://doi.org/10.1088/1674-4527/ac7af8. Search in Google Scholar
Varenius, E., R. Haas, and T. Nilsson. 2021. “Short-baseline interferometry local-tie experiments at the Onsala space observatory.” Journal of Geodesy 95(5), https://doi.org/10.1007/s00190-021-01509-5. Search in Google Scholar PubMed PubMed Central
Wresnik, J., R. Haas, J. Boehm, and H. Schuh. 2006. “Modeling thermal deformation of VLBI antennas with a new temperature model.” Journal of Geodesy 81(6–8), 423–31, https://doi.org/10.1007/s00190-006-0120-2. Search in Google Scholar
© 2022 Michael Lösler et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Shipborne GNSS acquisition of sea surface heights in the Baltic Sea
- Geoid model validation and topographic bias
- Low-frequency fluctuations in the yearly misclosures of the global mean sea level budget during 1900–2018
- Introducing covariances of observations in the minimum L1-norm, is it needed?
- Developing low-cost automated tool for integrating maps with GNSS satellite positioning data
- An optimal design of GNSS interference localisation wireless security network based on time-difference of arrivals for the Arlanda international airport
- Ray tracing-based delay model for compensating gravitational deformations of VLBI radio telescopes
- Spatial resolution of airborne gravity estimates in Kalman filtering
- Metrica – an application for collecting and navigating geodetic control network points. Part I: Motivation, assumptions, and issues
- Review Article
- GBAS: fundamentals and availability analysis according to σvig
- Book Review
- Analysis of the gravity field, direct and inverse problems, by Fernando Sanso and Daniele Sampietro published by Birkhäuser 2022
- Special Issue: 2021 SIRGAS Symposium (Guest Editors: Dr. Maria Virginia Mackern) - Part I
- Quality control of SIRGAS ZTD products
- A contribution for the study of RTM effect in height anomalies at two future IHRS stations in Brazil using different approaches, harmonic correction, and global density model
- SIRGAS reference frame analysis at DGFI–TUM
- Historical development of SIRGAS
- Analysis of high-resolution global gravity field models for the estimation of International Height Reference System (IHRS) coordinates in Argentina
- Assessment of SIRGAS-CON tropospheric products using ERA5 and IGS
- Wet tropospheric correction for satellite altimetry using SIRGAS-CON products
Articles in the same Issue
- Research Articles
- Shipborne GNSS acquisition of sea surface heights in the Baltic Sea
- Geoid model validation and topographic bias
- Low-frequency fluctuations in the yearly misclosures of the global mean sea level budget during 1900–2018
- Introducing covariances of observations in the minimum L1-norm, is it needed?
- Developing low-cost automated tool for integrating maps with GNSS satellite positioning data
- An optimal design of GNSS interference localisation wireless security network based on time-difference of arrivals for the Arlanda international airport
- Ray tracing-based delay model for compensating gravitational deformations of VLBI radio telescopes
- Spatial resolution of airborne gravity estimates in Kalman filtering
- Metrica – an application for collecting and navigating geodetic control network points. Part I: Motivation, assumptions, and issues
- Review Article
- GBAS: fundamentals and availability analysis according to σvig
- Book Review
- Analysis of the gravity field, direct and inverse problems, by Fernando Sanso and Daniele Sampietro published by Birkhäuser 2022
- Special Issue: 2021 SIRGAS Symposium (Guest Editors: Dr. Maria Virginia Mackern) - Part I
- Quality control of SIRGAS ZTD products
- A contribution for the study of RTM effect in height anomalies at two future IHRS stations in Brazil using different approaches, harmonic correction, and global density model
- SIRGAS reference frame analysis at DGFI–TUM
- Historical development of SIRGAS
- Analysis of high-resolution global gravity field models for the estimation of International Height Reference System (IHRS) coordinates in Argentina
- Assessment of SIRGAS-CON tropospheric products using ERA5 and IGS
- Wet tropospheric correction for satellite altimetry using SIRGAS-CON products