Introduction
An affine structure of a group G is given by an action b↦a⋅b of G on the set G which satisfies the symmetry condition (a⋅b)a=(b⋅a)b for all a,b∈G.
For any affine structure, the operation a+b:=(a⋅b)a makes G into an abelian group A so that the action of G on A provides A with a G-module structure.
The identity map G→A is a 1-cocycle.
A G-module A which arises in this way is said to be a brace [12].
The standard example of a brace is given by the Jacobson radical J of a ring, with the group operation a∘b:=ab+a+b and the action a⋅b:=b(1+a)-1.
The group G of a brace A is therefore called the adjoint group of A.
If G is finite, an affine structure of G forces G to be solvable [7].
Not every finite solvable group admits an affine structure, but counterexamples are still hard to find.
They can be regarded as discrete versions of non-affine nilvarieties [5] which disprove Milnor’s second conjecture [10].
A translation into finite group theory [14] led to a class of p-groups of nilpotency class ⩾9 and p⩾23 which do not admit an affine structure [3].
Recall that the generalized quaternion group Q2m of order 2m+2 (m⩾1) is given by the relations
a2m+1=1,b2=a2m,bab-1=a-1.
Braces with Q2m as adjoint group have been called quaternion braces [8, 4].
Using computer calculations up to order 512, Guarnieri and Vendramin [8] conjectured that, for each order 2m+2⩾32, there are exactly 7 isomorphism classes of quaternion braces.
If true, this would provide an infinite sequence of groups with increasing order for which the number of affine structures stabilizes at a certain order.
Some evidence for this phenomenon is given by papers of Sysak et al. [1, 17] which imply that the additive group of a quaternion brace must have a cyclic subgroup of index 4.
In this paper, we classify quaternion braces of order ⩾32 and confirm the conjecture.
As a first step, we show that the socle of such a brace is non-trivial, which implies that the centre of the adjoint group is a brace ideal.
Factoring out this ideal turns every quaternion brace into a brace with a dihedral adjoint group.
By induction, this implies that all subgroups of 〈a4〉 are brace ideals, while the Frattini subgroup 〈a2〉 of the adjoint group is still an additive subgroup (Proposition 1), reproving the results of Sysak et al. [1, 17] in a brace-theoretic manner.
It turns out that the subgroup 〈a2〉 need not be a submodule under the adjoint group.
Using Proposition 1, it follows that the additive group of a dihedral brace of order 16 is either cyclic or isomorphic to C2×C8 (Propositions 2–4).
By an inductive argument, we infer that the additive group of a quaternion brace of order ⩾32 is either cyclic or isomorphic to C2×C2m+1 (Theorem 1).
As a second step, we prove that the brace ideal 〈a4〉 is always contained in the socle (Theorem 2).
In the extreme case 〈a4〉=Soc(A), the retraction A/Soc(A) of A is a dihedral brace of order 8.
These braces were classified by Bachiller [2] and further investigated in [16].
There are 8 such braces, but we show that only one of them can arise.
As a consequence, we infer that the case 〈a4〉=Soc(A) leads to a single isomorphism class of quaternion braces (Theorem 3).
So we are left with the case that the subgroup 〈a2〉 is contained in the socle.
Then a⋅a∉〈a〉 again leads to a single isomorphism class of quaternion braces (Theorem 4).
The remaining case a⋅a∈〈a〉 includes the cyclic quaternion brace [13].
Apart from this, we find 4 isomorphism classes of quaternion braces, characterized by a classifying pair of invariants (Theorem 5).
So we arrive at seven isomorphism classes of quaternion braces, as conjectured.
1 Dihedral and quaternion braces
An affine structure [16] of a group G is given by a left action b↦a⋅b of G on its underlying set such that the equation
(1.1)(a⋅b)a=(b⋅a)b
holds for all a,b∈G.
It follows that the equations
ab⋅c=a⋅(b⋅c),1⋅a=a,a⋅1=1
are satisfied in G.
The symmetry condition (1.1) gives rise to an abelian group structure
(1.2)a+b:=(a⋅b)a=(b⋅a)b
of G which makes G into a linear cycle set [11]:
(1.3)a⋅(b+c)=(a⋅b)+(a⋅c),
(1.4)(a+b)⋅c=(a⋅b)⋅(a⋅c),
providing a solution to the Yang–Baxter equation [11].
If b↦ba denotes the inverse to b↦a⋅b, the group operation of G can be recovered as ab:=ab+b.
Therefore, equations (1.3), (1.4) give an alternative description of an affine structure in terms of addition (1.2) instead of the group structure of G.
The prototypical example is given by any (unital associative) ring R with Jacobson radical J.
Then the adjoint group (J;∘) with a∘b:=ab+a+b has an affine structure with a⋅b:=b(1+a)-1.
By analogy, a system (A;+,⋅) satisfying equations (1.3) and (1.4) is called a brace [12] with adjoint groupA∘:=(A;∘) given by
(1.5)a∘b:=ab+b.
Thus, in essence, a brace is equivalent to an affine structure of its adjoint group.
As in the case of a Jacobson radical J, the unit element of (A;∘) coincides with the zero element of the additive group (A;+).
Therefore, we denote it by 0.
Following Jacobson [9], we also write a′ for the inverse of a in the adjoint group A∘.
Note that a↦ab gives a right action of A∘ on (A;+) so that equation (1.5) states that the identity map A∘→A is a bijective 1-cocycle for this action.
Thus a brace with adjoint group G could also be regarded as a bijective 1-cocycle of G onto a right G-module.
For the basics on braces, we refer to [12].
Motivations, and relationships to various other structures can be looked up in [14].
Here we only recall the main concepts needed for what follows.
Like in a ring, there is a concept of ideal for any brace A.
To see the analogy, we introduce the ring multiplication of a brace, denoted by juxtaposition, and given by the equation a∘b=ab+a+b.
Thus ab=ab+a.
The reader is warned that ring multiplication is only one-sided distributive: (a+b)c=ab+ac.
Now a subgroup I of a brace A is said to be a right ideal if a∈I and b∈A implies that ab∈I.
If ba∈I also holds, I is called an ideal [12].
As the name suggests, ideals can be factored out to give new braces A/I, like in ring theory.
Equivalently, a right ideal is the same as an additive subgroup which is invariant under the adjoint operation a↦b⋅a for all b∈A∘.
In particular, any right ideal is a subgroup of A∘.
A right ideal I is an ideal if and only if I∘ is a normal subgroup of A∘.
A brace A and its corresponding affine structure of A∘ is said to be trivial if the action b↦a⋅b is trivial, or equivalently, ab=0 for all a,b∈A.
Thus every abelian group can be regarded as a trivial brace.
There are two ideals of any brace A which deserve particular attention, the socle
Soc(A):={a∈A∣for allb∈A,we havea⋅b=b},
and the “square” A2 which consists of the finite sums ∑i=1naibi with ai,bi∈A.
The latter is the smallest ideal I for which A/I is a trivial brace, hence a counterpart to the socle.
The brace homomorphism A↠A/Soc(A) is called the retraction map, and A/Soc(A) is said to be the retraction of A.
The fixator
Fix(A):={a∈A∣for allb∈A,we haveb⋅a=a}
is only a right ideal, in general.
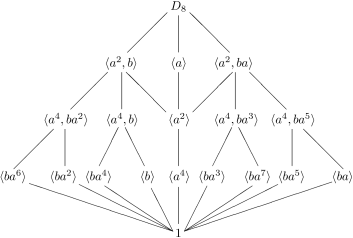
Now we turn our attention to the generalized quaternion group Q2m of order 2m+2, and the dihedral group D2m of order 2m+1, given by generators and relations
(1.6)Q2m=〈a,b∣a2m+1=1,b2=a2m,aba=b〉(m⩾1),
D2m=〈a,b∣a2m=b2=1,aba=b〉(m⩾2).
We have written the relations in a form which underlines the similarity of both groups and will be useful in what follows.
The generators a,b will be kept fixed throughout the paper.
The lattices of subgroups of Q2m and D2m are almost identical, with the only difference that Q2m has a smallest subgroup, the centre Z=〈a2m〉, so that Q2m/Z≅D2m.
The centre of D2m is also of order 2, namely, Z(D2m)=〈a2m-1〉.
In both cases, the commutator subgroup coincides with the Frattini subgroup 〈a2〉.
There are three maximal subgroups: the cyclic group 〈a〉, and two non-cyclic subgroups 〈a2,b〉 and 〈a2,ba〉 which are connected by the automorphism b↦ba, a↦a.
Note that any non-cyclic subgroup of D2m is dihedral, while each non-cyclic subgroup of Q2m is a generalized quaternion group.
We frequently make use of the fact that D2m and Q2m admit an automorphism which maps a to an odd power ai and b to some baj.
For i=j=1, this automorphism is an involution which fixes the subgroups of 〈a〉.
The normal subgroups of D2m or Q2m are exactly the groups which either contain or are contained in the Frattini subgroup 〈a2〉.
For a finite brace A, we call |A| the order of A.
If the additive group is cyclic, the brace A is said to be cyclic [13].
In what follows, we focus upon braces of order 2n which we also call 2-braces.
We say that a 2-brace is dihedral if its adjoint group is a dihedral group.
If A∘ is a generalized quaternion group, we speak of a quaternion brace.
To classify quaternion braces, we first have to deal with the possible additive groups.
In [13], we have shown that, for each 2-power ⩾8, there is a unique cyclic quaternion brace.
Its socle is of index 2.
As these braces are completely described, we can restrict ourselves to non-cyclic braces.
Proposition 1.
Let A be a dihedral or quaternion brace of order 2n.
Then all subgroups 〈a4i〉 of A∘ are brace ideals.
If |A|⩾16, then 〈a2〉 is an additive subgroup of A, and a2n-2∈Soc(A)∩Fix(A).
Proof.
By definition (1.6), |A|⩾8.
For |A|=8, we have a4=0.
So we can assume that n⩾4.
Suppose that Soc(A)=0.
Then A∘ embeds into the automorphism group Aut(A+) of the additive group A+ of A.
Thus A+ admits an automorphism of order 2n-1.
By Berkovič’s theorem [6], this is impossible.
Hence Soc(A) contains the centre Z=〈a2n-2〉 of A∘.
For x∈A and z∈Z, this gives (x⋅z)x=(z⋅x)z=xz=zx, which yields x⋅z=z.
Thus Z is a brace ideal with Z⊂Soc(A)∩Fix(A), and A/Z is a dihedral brace.
If |A/Z|⩾16, we can proceed in the same fashion to obtain a 2-element brace ideal of A/Z.
Its inverse image along A↠A/Z is a brace ideal of A.
Iterating this procedure, we get a sequence of brace ideals of A,
0=〈a2n-1〉⊂〈a2n-2〉⊂⋯⊂〈a4〉.
Thus B:=A/〈a4〉 is a dihedral brace of order 8, and it remains to verify that B satisfies 2a2=0.
Now there are eight braces with adjoint group D4 (see [2]).
In [16, Example 3], they are denoted as B1,…,B8.
For B1,…,B6, the socle is non-trivial, which implies that 〈a2〉 is an ideal.
The brace B7 has additive group C2×C2×C2 so that 2a2=0.
For the remaining brace B8, the additive group is C2×C4.
In terms of vectors (xy) with x∈C2 and y∈C4, the additive structure of B8 is given as follows:
a=(01),a2=(12),a3 =(11),
b=(02),ba=(03),ba2 =(10),ba3=(13).
Thus 2a2=0, which completes the proof.
∎
Dealing with dihedral or quaternion braces, we mostly write xy instead of x∘y.
As we make no further use of the ring multiplication in this paper, this cannot lead to confusion.
Accordingly, we also write x-i for the inverse of xi in the adjoint group.
In what follows, we frequently use the formula (see [16, equation (2.8)]) which holds in any brace:
x⋅yz=((z⋅x)⋅y)(x⋅z).
2 The additive group of a quaternion brace
In this section, we show that non-cyclic quaternion braces of order 2m+2⩾32 have an additive group isomorphic to C2×C2m+1, where Cn denotes the cyclic group of order n.
To this end, we have to prove three non-existence theorems first.
Proposition 2.
There is no dihedral brace with additive group C4×C4.
Proof.
Let A be such a brace.
Then the subbrace 2A has the Klein four-group as additive group.
Suppose first that 2A=〈a2〉.
Since 〈a2〉 is cyclic, this implies that 2A is a non-trivial brace.
Hence a2⋅a2=a6.
Moreover, a⋅a2 and a⋅a6 belong to {a2,a6}.
Thus a2⋅a2=a⋅(a⋅a2)=a2, a contradiction.
So we have 2A≠〈a2〉, and by symmetry, we can assume that 2A=〈a4,b〉.
By Proposition 1, a4∈Soc(A)∩Fix(A).
Hence the above formula yields
x⋅ya4=((a4⋅x)⋅y)(x⋅a4)=(x⋅y)a4 for allx,y∈A.
Thus
(2.1)x⋅ya4=(x⋅y)a4.
Suppose that a+a=a4.
Then a⋅a=a3.
So
a⋅a2=((a⋅a)⋅a)(a⋅a)=(a3⋅a)a3=(a⋅a3)a,
which gives
a2⋅a2=a⋅(a⋅a3)a=((a⋅a)⋅(a⋅a3))(a⋅a)=(a3⋅(a⋅a3))a3=(a4⋅a3)a3=a6.
Hence a2+a2=(a2⋅a2)a2=0.
Since a2∉〈a4,b〉=2A, this is impossible.
So we obtain
a+a∈{b,ba4}.
(Note that a+a=0 would imply that a∈2A=〈a4,b〉.)
By symmetry, we can assume that a+a=b.
So a⋅a=ba7.
Furthermore, b+b=0 implies that b⋅b=b.
By Proposition 1, a2+a2∈2A∩〈a2〉, which yields a2+a2=a4.
Thus a2⋅a2=a2.
If a⋅b=a4, then b=a7⋅a4=a4, which is impossible.
Since a⋅b∈2A, this implies that a⋅b∈{b,ba4}.
Hence (a⋅b)a=(b⋅a)b yields b⋅a∈{a7,a3}.
Thus
b⋅a2=((a⋅b)⋅a)(b⋅a)=(b⋅a)2=a6.
So (a2⋅b)a2=(b⋅a2)b=a6b=ba2 gives a2⋅b=b.
Therefore, we get
b⋅(a⋅b)=a7⋅(b⋅b)=a7⋅b=a⋅b.
Hence
a⋅ba=((a⋅a)⋅b)(a⋅a)=(ba7⋅b)ba7=(b⋅(a⋅b))ba7=(a⋅b)ba7=(a⋅b)ab=(b⋅a)bb,
that is, a⋅ba=b⋅a.
Consequently, ba⋅ba=b⋅(b⋅a)=a, which yields
ba+ba=aba=b.
Furthermore, equation (2.1) yields
a5+a5=(a5⋅a5)a5=(a⋅a5)a5=(a⋅a)a=b,
ba5+ba5=(ba5⋅ba5)ba5=(ba⋅ba)a4ba5=a5ba5=b.
Thus
a+a=a5+a5=ba+ba=ba5+ba5=b.
On the other hand, ba7⋅ba7=ba7⋅(a⋅a)=b⋅a.
Hence
ba7+ba7=(b⋅a)ba7=(a⋅b)aa7=a⋅b∈{b,ba4}.
Now the fibers of the map x↦2x are of cardinality 4.
Hence a⋅b=ba4.
Thus (a⋅b)a=(b⋅a)b yields b⋅a=a3, and therefore, a=b⋅a3.
If a3⋅a3=a, then a3=a5⋅a=a⋅a, a contradiction.
So a3+a3=(a3⋅a3)a3≠a4, which yields a3+a3=ba4.
Thus a3⋅a3=ba.
So we obtain
ba=a3⋅a3=a3⋅(b⋅a)=ba5⋅a=b⋅(a⋅a)=b⋅ba7=((a7⋅b)⋅b)(b⋅a7)=((a⋅b)⋅b)(b⋅a7)=(ba4⋅b)(b⋅a3)a4=(b⋅b)aa4=ba5,
a contradiction.
So the brace A cannot exist.
∎
Proposition 3.
There is no dihedral brace with additive group C4×C2×C2.
Proof.
Let A be such a brace.
The set I of elements x∈A with 2x=0 is a right ideal of index 2, hence a brace ideal of A.
In particular, a2∈I.
If I=〈a〉, then I is a brace with additive group C2×C2×C2 and cyclic adjoint group.
By [15, Proposition 10], this is impossible.
Using the symmetry of A∘≅D8, we can assume without loss of generality that I=〈a2,b〉.
As the additive group of I is elementary abelian, the dihedral brace I is of type B7 in the list of braces in [16, Example 3].
By Proposition 1, a4 belongs to the fixator of A.
Hence a4∈Fix(I), contrary to [16, table (5.5)].
Thus A cannot exist.
∎
Proposition 4.
There is no dihedral brace with additive group C2×C2×C2×C2.
Proof.
Let A be such a brace.
Then 2A=0.
By Proposition 1, 〈a4〉⊂Fix(A).
Consider the brace ideal A2 (see [12]), the smallest ideal I for which A/I is a trivial brace.
By [12, corollary of Proposition 8], A2≠A.
Since A/A2 is trivial, 〈a2〉⊂A2.
If A2=〈a〉, the adjoint group of A2 is cyclic, while the additive group is elementary abelian, contrary to [15, Proposition 10].
If A2=〈a2,b〉, then A2 is a dihedral brace of type B7.
As in the preceding proof, this leads to a contradiction.
Thus it remains to consider the case A2=〈a2〉.
Then 0=a+a=(a⋅a)a yields a⋅a=a7.
Hence 〈a〉 is a subbrace of A with cyclic adjoint group.
As above, we infer that this is impossible.
∎
Now we are ready to determine the additive group of a dihedral or quaternion brace.
Theorem 1.
Let A be a non-cyclic brace of order |A|=2n.
If A is dihedral with n⩾4 or quaternion with n⩾5, then its additive group is isomorphic to C2×C2n-1.
Proof.
Assume first that A is dihedral.
For n=4, the theorem follows by Propositions 2–4.
So we can assume that n⩾5.
By Proposition 1, 〈a4〉 is a brace ideal, and 〈a2〉 is an additive subgroup of A.
Thus a2+a2∈〈a2〉, which implies that a2⋅a2∈〈a2〉.
Hence C:=〈a2〉 is a subbrace of A with a cyclic adjoint group of order |C|⩾8.
By [15, Proposition 10], it follows that the additive group C+ of C is cyclic.
Thus, if the theorem were false, the additive group of A would have to be isomorphic either to C+×C4 or C+×C2×C2.
Factoring out the ideal 〈a8〉, this would give a dihedral brace with additive group C4×C4 or C4×C2×C2.
By Propositions 2 and 3, this is impossible.
Now let A be a quaternion brace with n⩾5.
By Proposition 1 and [16, Proposition 10], C=〈a2〉 is a cyclic subgroup of the additive group of A.
Suppose that the theorem does not hold.
Then the additive group of A must be isomorphic to C2n-2×C4 or C2n-2×C2×C2.
So the brace A/〈a8〉 has an additive group isomorphic to C4×C4 of C4×C2×C2, contrary to Proposition 2 or Proposition 3.
∎
Next we show that the socle of a quaternion brace is relatively large.
Theorem 2.
Let A be a quaternion brace of order |A|⩾32.
Then 〈a4〉⊂Soc(A).
Proof.
If A is cyclic, this follows by [13, Proposition 12].
Thus let A be non-cyclic.
By Theorem 1, the additive group of A is of the form C2×C2m+1 with m⩾3.
We identify Cn with the additive group of ℤ/nℤ and represent the elements of C2×C2m+1 as vectors (xy) with x∈C2 and y∈C2m+1.
Then the automorphisms of C2×C2m+1 are matrices
A=(1y2mx1+2z)
with x,y∈C2 and z∈C2m. (The mnemonic reason to write A for the matrix, not to be confused with the brace A, will become obvious below.) Note that the vector (10)∈C2×0 has to be mapped by A to a non-zero vector 𝐯 with 2𝐯=0, which forces the lower left entry of A to be of the form 2mx.
Since A has to be invertible, the diagonal entries must be odd.
So we have
A2=(1002mxy+(1+2z)2),A4=(100(1+2z)4).
For a second matrix
B=(1v2mu1+2w)
in Aut(C2×C2m+1), we have
AB=(1v+y2m(x+u)2mxv+(1+2z)(1+2w)),
and thus
ABA=(1v2mu2m(x+u)y+2mxv+(1+2z)2(1+2w)).
Let a↦A and b↦B be the representation A∘→Aut(C2×C2m+1) given by the map d↦c⋅d in the brace A.
The relation aba=b in A∘ gives ABA=B, that is,
1+2w=2m(x+u)y+2mxv+(1+2z)2(1+2w)
in C2m+1.
Multiplying by the unit (1+2w)-1 turns the equation into
(2.2)1=2m(x+u)y+2mxv+(1+2z)2.
Multiplying with the even number 1+(1+2z)2 yields
1+(1+2z)2=(1+2z)2(1+(1+2z)2)=(1+2z)2+(1+2z)4.
Whence (1+2z)4=1.
Thus A4=1, which shows that a4∈Soc(A).
∎
3 Quaternion braces with minimal socle
In this section, we classify the non-cyclic quaternion braces A of order 2m+2⩾32 for which the socle is minimal, that is, Soc(A)=〈a4〉.
Then A/Soc(A) is a dihedral brace of order 8.
As above, let a,b∈A be represented by the matrices
A=(1y2mx1+2z),B=(1v2mu1+2w)
in Aut(C2×C2m+1).
The equation aba=b in A∘ yields equation (2.2), which can be rewritten as
(3.1)4z(z+1)=2m(xy+uy+xv),
while b2=a2m leads to B2=1, that is, 2muv+(1+2w)2=1, or equivalently,
(3.2)4w(w+1)=2muv.
Since A4=1, the equation a2m+1=1 gives no further relation for the matrices A and B.
So the representation A∘→Aut(C2×C2m+1) is completely characterized by equations (3.1) and (3.2) in C2m+1.
Our first aim is to determine the possible types of braces B=A/Soc(A).
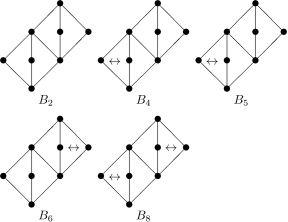
In [16, Example 3], the dihedral braces B1,…,B8 of order 8 are described.
The cyclic brace B1 is excluded by the following.
Proposition 5.
Let A be a quaternion brace of order ⩾16.
If A/〈a4〉 is a cyclic brace, then A is cyclic.
Proof.
Assume that B:=A/〈a4〉 is cyclic.
Since B∘ is dihedral, [13, Proposition 12] implies that Soc(B)=2B.
Any x∈B∖2B satisfies x∘x=0 and B∘≅〈x〉×2B.
Moreover, x generates the additive group of B.
Since a is of order 4 modulo 〈a4〉, its residue class in B generates 2B.
Hence 〈a〉/〈a4〉=2B.
So the residue class of b modulo 〈a4〉 generates the additive group of B.
As an inverse image of Soc(B), the subgroup 〈a〉 of A∘ is a brace ideal.
Its adjoint group is cyclic of order ⩾8.
So the additive group of 〈a〉 is cyclic, too.
Furthermore, b+b generates the additive group of 〈a〉 since its image modulo 〈a4〉 generates 2B.
Therefore, the brace A itself is cyclic.
∎
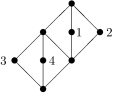
So the additive group of B=A/Soc(A) must be isomorphic to C2×C4.
The lattice of subgroups of C2×C4 looks as follows:
An automorphism of C2×C4 can only permute 1 with 2 or 3 with 4, while the other subgroups have to stay fixed.
Similarly, an automorphism of C2×C2m+1 induces a lattice automorphism which therefore can only permute the two obvious pairs of subgroups, like 1,2 or 3,4 in the following example for m=3:
For B3 and B7, the additive group is elementary abelian.
Thus only the following braces have to be considered:
The orbits of subgroups under automorphisms are indicated in the pictures.
Since B=A/Soc(A), the braces B4,B5, and B8 where the lower pair of subgroups is moved, have to be discarded.
Thus only B2 and B6 remain to be considered.
For B2, the residue class of a∈A∘ acts trivially on the additive group.
So the entries of the matrix A satisfy y=0 and 2∣z.
As the subgroups 1 and 2 in (3.3) have to stay fixed under the matrix B, it follows that v=0.
Thus equation (3.1) becomes 4z=0, which implies that A2=1.
Since a2∉Soc(A), this contradicts our assumption.
So the brace A/Soc(A) must be of type B6.
We shall obtain this fact independently in the proof of Theorem 3.
We need the construction of braces by socle extension (see [2, Theorem 2.1]).
Proposition 6.
Let B be a brace, and let A be an abelian group with a surjective homomorphism p:A↠B onto the additive group of B.
Furthermore, let σ:B∘↪Aut(A) be an injective group homomorphism such that
(3.4)p(σ(b)(a))=b⋅p(a)
holds for a∈A and b∈B.
Then
(3.5)a⋅c:=σp(a)(c)
makes A into a brace with retraction map p.
Conversely, every brace A is obtained in this way.
Proof.
For a,c,d∈A, equations (3.4), (3.5) give
(a+c)⋅d=σp(a+c)(d)=σ(p(a)+p(c))(d)=σ((p(a)⋅p(c))∘p(a))(d)=σ((p(a)⋅p(c))σp(a)(d)=σp(σp(a)(c))σp(a)(d)=σp(a⋅c)(a⋅d)=(a⋅c)⋅(a⋅d).
Thus equations (1.3), (1.4) are satisfied.
Hence A is a brace with Soc(A)=Kerp.
Conversely, let A be a brace with retraction map p:A↠B.
Then a↦b⋅a induces a natural embedding σ:B↪Aut(A) which satisfies equation (3.5).
Furthermore, equation (3.4) follows since p is a brace morphism.
∎
Remarks.
(1) To verify equation (3.4), it is enough to check the equation for the elements b of a generating system of B∘.
Indeed, let equation (3.4) be satisfied for b1,b2∈B.
Then
p(σ(b1b2)(a))=p(σ(b1)σ(b2)(a))=b1⋅p(σ(b2)(a))=b1⋅(b2⋅p(a))=b1b2⋅p(a).
Similarly, equation (3.4) implies that p(σ(b-1)(a))=b-1⋅p(a).
(2) Equation (3.4) states that the diagram
commutes for all b∈B.
In other words, B∘ embeds into the group Autp(A) of automorphisms which leave Kerp invariant so that the composed map
B∘↪Autp(A)→Aut(B)
coincides with the adjoint action of B.
Theorem 3.
Let m⩾3 be an integer.
Up to isomorphism, there is a unique quaternion brace A of order 2m+2 with |A/Soc(A)|⩾8.
Proof.
For the cyclic quaternion brace, the socle is of index 2.
Thus A cannot be cyclic.
By Theorem 2, |A/Soc(A)|=8.
We keep the above notation.
To make A into a brace, we have to identify the generators a,b of the adjoint group with vectors in the additive group C2×C2m+1:
(3.6)a=(pq),b=(rs).
Note that
A-1=(1y2mx2mxy+(1+2z)-1),
B-1=(1v2mu2muv+(1+2w)-1).
Thus, with the identification (3.6),
a2=aa+a=A-1(pq)+(pq)=(yq2mx(p+yq)+(1+2z)-1q+q),
a3=(a2)a+a=(p+yq2mxp+(1+2z)-2q+(1+2z)-1q+q).
Hence a4=(a3)a+a, which yields
a4=(0(1+2z)-3q+(1+2z)-2q+(1+2z)-1q+q).
Now we have 1+(1+2z)+(1+2z)2+(1+2z)3=4(1+3z+4z2+2z3), from which we infer that a4=(04t) for some t∈C2m+1.
Since a4∈Soc(A), it follows that a8=(a4)a4+a4=(08t).
Hence a4i=(04it), and thus a2m=0 if t is even, and a2m=(02m) if t is odd.
Since
(1+2z)-3q+(1+2z)-2q+(1+2z)-1q+q=4q(1+2z)-3(1+3z+4z2+2z3),
it follows that q and 1+3z must be odd, that is, 2∤q and 2∣z.
Next we have
ab=ab+b=B-1(pq)+(rs)=(p+v+r2mu(p+v)+(1+2w)-1q+s).
Thus
aba=(ab)a+a=(v+r+y+ys2mx(p+v+r)+2mxy(1+s)+2mu(p+v)+(1+2z)-1(1+2w)-1q+(1+2z)-1s+q).
Since aba=b, this yields
(3.7)v=y(1+s),
and therefore,
2mx(p+r)+2mu(p+v)+(1+2z)-1(1+2w)-1q+q+(1+2z)-1s=s.
Multiplication with (1+2z)(1+2w) gives
2mx(p+r)+2mu(p+v)+q+q(1+2z)(1+2w)=2zs(1+2w).
Modulo 4, this yields, since z is even, 4∣q+q(1+2w)=2q(1+w).
Hence w is odd.
Thus, by equations (3.1) and (3.7),
4z=2m(xy+uy+xv)=2my(x+u+x(1+s)),
which yields
(3.8)4z=2my(u+xs).
Similarly, equation (3.2) gives
(3.9)4(w+1)=2muy(1+s).
Using equations (3.7), (3.8), we obtain
2mx(p+r)+2mu(p+v)+2q(1+z+w)-2zs=-4qzw+4zsw=2my(u+xs)(-qw+sw)=2my(u+xs)(1+s)=2my(u+xs+us+xs)=2myu(1+s)=2muv.
Hence
(3.10)2mx(p+r)+2mup+2q(z+w+1)=2zs.
Furthermore,
b2=bb+b=B-1(rs)+(rs)=(vs2mur+2muvs+(1+2w)-1s+s).
Since b2=(02m), this yields 2mu(r+vs)+(1+2w)-1s+s=2m.
Note that 2∣vs already follows by equation (3.7).
Thus, multiplying with 1+2w, we obtain 2mur+s+s(1+2w)=2m.
Whence
(3.11)2m(ur+1)=2s(1+w).
Up to here, we have not assumed that Soc(A)=〈a4〉.
Now we add this condition.
Then 2mxy+(1+2z)2≠1 in C2m+1, that is, 4z(z+1)≠2mxy.
By (3.8), this is equivalent to 2my(u+xs)≠2mxy, that is, 2my(u+x(s+1))≠0.
So we obtain
(3.12)y=1,u=x(s+1)+1.
Suppose that x=1.
Then u=s, and equation (3.10) gives
2m(p+r)+2msp+2q(z+w+1)=2zs.
Equations (3.8) and (3.9) turn into
4z=2m(s+s)=0 and 4(w+1)=2ms(s+1)=0.
If s is even, then equation (3.11) gives 2m(sr+1)=0, hence 2∣sr+1, a contradiction.
So s is odd.
Hence 2mr+2q(z+w+1)=2zs, and thus
2mr=2z(q+s)+2q(1+w)=2q(1+w)=2(1+w).
On the other hand, equation (3.11) yields
2(1+w)=2s(1+w)=2m(ur+1)=2m(r+1),
a contradiction.
So we get
(3.13)x=0.
Since
ba=ba+a=(110(1+2z)-1)(rs)+(pq)=(r+s+p(1+2z)-1s+q),
the transformation b↦ba changes the parity of s.
So we can assume that s is even.
Then equations (3.7), (3.12) and (3.13) give u=v=y=1,
and equations (3.8), (3.9) turn into
4z=4(w+1)=2m.
So 1+2z=1±2m-1 and (1+2z)2=(1+2z)-2=1+2m.
Hence
ba2=ba2+a2=(1001+2m)(rs)+(1(1∓2m-1)q+q)=(r+1(1+2m)s+(2∓2m-1)q).
Since m⩾3, using a possible transformation b→ba2 if necessary, we can assume without loss of generality that 4∣s.
So equations (3.10), (3.11) become
2mp=2(z+w+1)
and 2m(r+1)=0, which yields r=1.
Thus
A=(1101±2m-1),B=(112m2mp-1∓2m-1).
Since
A3=(1101∓2m-1),
we can assume, possibly after a transformation a↦a3, that the sign in the matrix A is positive.
Applying the involution
α=(1p01)
to the additive group C2×C2m+1, the vector (pq) is mapped to (0q), while (1s) remains fixed.
Furthermore,
αAα-1=A,αBα-1=(112m-1-2m-1).
So we can assume that p=0, which yields
(3.14)A=(1101+2m-1),B=(112m-1-2m-1).
In particular,
(1+2z)-3q+(1+2z)-2q+(1+2z)-1q+q=(1+2m-1)q+(1+2m)q+(1-2m-1)q+q=4q+2m,
which gives a4=(04q+2m).
Therefore, ba4=(1s+4q+2m).
Since m⩾3, we can replace b by some ba4i so that s=0.
Finally, by changing the generator of the second factor in the additive group C2×C2m+1, the matrices (3.14) are not altered, and q is multiplied by an odd number.
So we can assume that q=1.
Thus
a=(01),b=(10),
which shows that A is unique, up to isomorphism.
To show that A is a brace, we apply Proposition 6.
Thus, if
p:C2×C2m+1↠C2×C4
denotes the retraction map between the additive groups, we have to verify that C2×C4 is the additive group of a brace such that p(σp(a)(𝐯))=p(a)⋅p(𝐯) and p(σp(b)(𝐯))=p(b)⋅p(𝐯) holds for all 𝐯∈C2×C2m+1.
By Remark (2) after Proposition 6, this means that the reduced matrices
(3.15)A¯=(1101),B¯=(1103)
make C2×C4 into a dihedral brace B of order 8:
a=(01),a2=(12),a3 =(13),
b=(10),ba=(11),ba2 =(02),ba3=(03).
Indeed, let p:C2×C4↠C4 be the homomorphism with kernel {(12)}.
Then the matrices (3.15) induce automorphisms of C4 which make C4 into a cyclic brace with Klein four-group as adjoint group.
By Proposition 6, B is a brace.
∎
4 The case 〈a2〉⊂Soc(A) with a⋅a∉〈a〉
By Theorem 3, it remains to consider the quaternion braces A of order 2m+2 with m⩾3 and a2∈Soc(A).
Here we focus upon the adjoint group.
To classify the possible affine structures, we have to check equation (1.1) for the elements of A∘.
Note first that the adjoint action on the socle is by conjugation: for x∈A and s∈Soc(A), we have xs=(s⋅x)s=(x⋅s)x, which gives
(4.1)x⋅s=xsx-1.
Thus, if x,y∈A and s∈Soc(A), then x⋅ys=((s⋅x)⋅y)(x⋅s), hence
(4.2)x⋅ys=(x⋅y)xsx-1.
In this section, we consider the case a⋅a∉〈a〉.
Applying an automorphism of A∘ which maps b to some bak, we can assume that
(4.3)a⋅a=b.
Then a=a-1⋅b=a⋅b, which gives
(4.4)a⋅b=a.
By equation (1.1), this implies that
(4.5)b⋅a=ba2m-2.
Suppose that b⋅b∉〈a〉, say, b⋅b=bak.
Then
a⋅ba=((a⋅a)⋅b)(a⋅a)=(b⋅b)b=bakb=bakb-1a2m=a2m-k.
Hence ba=a⋅a2m-k.
If k is even, then (4.1) would imply that ba∈〈a2〉.
Thus k is odd, and ba=(a⋅a)a2m-k-1=ba2m-k-1, which yields 1=2m-k-1 in C2m+1, a contradiction.
So we obtain b⋅b=ar for some r∈{0,…,2m+1-1}.
Since b⋅ar=b, the integer r must be odd.
Hence equations (4.2) and (4.5) give b=(b⋅a)a1-r=ba2m-2a1-r=ba2m-1-r.
Thus
(4.6)b⋅b=a2m-1.
By equations (4.1)–(4.6), the affine structure of A is uniquely determined:
ai⋅aj:={ajforiorjeven,baj-1fori,jodd,
ai⋅baj:={bajforieven,aj+1foriodd,jeven,ba2m+jfori,jodd,
bai⋅aj:={a-jforjeven,ba2m-j-1forieven,jodd,a2m-jfori,jodd,
bai⋅baj:={a2m-1-jfori,jeven,ba2m-j-2fori+jodd,ba-j-2fori,jodd.
Now it is easily checked that these equation define a brace.
To show that they define an action, it is enough to confirm that the equations are obtained by iterating the adjoint actions of a and b.
To check the identity (x⋅y)x=(y⋅x)y, the cases (x,y)=(ai,aj) and (bai,baj) are particularly simple because we only have to verify that (x⋅y)x is symmetric in i and j.
Moreover, the three cases of (x,y)=(ai,baj) are complementary to the three cases of (x,y)=(baj,ai): for example, if i is odd and j even, then (ai⋅baj)ai=aj+1ai, while
(baj⋅ai)baj=ba2m-i-1baj=b2a2m+i+1aj=ai+j+1.
So we have proved the following theorem.
Theorem 4.
Let m be a positive integer.
Up to isomorphism, there is a unique quaternion brace A of order ⩾32 with a2∈Soc(A) and a⋅a∉〈a〉.
5 The case 〈a2〉⊂Soc(A) with a⋅a∈〈a〉
Now let A be a quaternion brace of order 2m+2 with m⩾3 such that a2∈Soc(A) and a⋅a=ak+1 for some integer k.
Then a=a⋅ak+1, which shows that k is even.
Hence a=a⋅ak+1=(a⋅a)ak=a2k+1, which yields
(5.1)a⋅a=ak+1,k∈{0,2m}.
If a⋅b=ai, then b=a⋅ai∈〈a〉, which is impossible.
Hence a⋅b=baℓ for some integer ℓ.
If ℓ is odd, then
b⋅baℓ=((aℓ⋅b)⋅b)(b⋅aℓ)=((a⋅b)⋅b)(b⋅a)baℓ-1b-1=((a⋅b)⋅b)(a⋅b)aaℓ-1b-1=(b⋅(a⋅b))baℓb-1=(b⋅baℓ)a-ℓ.
Hence ℓ is even, contrary to our assumption.
Thus ℓ cannot be odd, which yields b=a⋅baℓ=(a⋅b)aℓ=ba2ℓ.
So we obtain
(5.2)a⋅b=baℓ,ℓ∈{0,2m}.
Since (b⋅a)b=(a⋅b)a=baℓ+1, this implies that
(5.3)b⋅a=a-ℓ-1.
Hence 〈a〉 is a right ideal of A.
Since 〈a〉 is of index 2, it is even a brace ideal.
In particular, this implies that b⋅b∉〈a〉.
Assume that b⋅b=bar.
The parity of r is an invariant.
Proposition 7.
A is a cyclic brace if and only if r is odd.
Proof.
By [15, Proposition 10], 〈a〉 is a cyclic brace.
Assume that r is odd.
Then equation (5.3) gives
b=b⋅bar=((ar⋅b)⋅b)(b⋅ar)=(baℓ⋅b)(b⋅a)a1-r=bara-ℓ-1a1-r=ba-ℓ.
Hence a⋅b=b, and thus
bar=b⋅b=ba⋅b=a-1b⋅b=a⋅bar=((ar⋅a)⋅b)(a⋅ar)=(ak+1⋅b)(a⋅a)ar-1=bak+1ar-1=bak+r.
So we obtain a⋅a=ak+1=a, which shows that the brace 〈a〉 is trivial.
Since b+b=(b⋅b)b=barb=a2m-r generates 〈a〉, it follows that b generates the additive group of A.
The converse follows by [13, Proposition 12].
∎
So we can assume that r is even.
If r≡2(mod4), then
ba⋅ba=b⋅(a⋅ba)=b⋅((a⋅a)⋅b)(a⋅a)=b⋅(ak+1⋅b)ak+1=b⋅baℓak+1=((aℓ+k+1⋅b)⋅b)(b⋅aℓ+k+1)=(baℓ⋅b)(b⋅a)a-ℓ-k=bara-ℓ-1a-ℓ-k=bar-k-1=(ba)ar-k-2.
Hence, if we replace b by ba, the new r will be divisible by 4.
Thus j:=r2 is even, and baj⋅baj=b⋅baj=(b⋅b)a-j=bar-j=baj.
Therefore, if we replace b by baj, we obtain
(5.4)b⋅b=b.
Proposition 8.
Let A be a quaternion brace of order 2m+2 with m⩾3 such that b⋅b=b.
Then k,l∈{0,2m} are invariants for the isomorphism class of A.
Proof.
Consider the group automorphism given by a↦ai and b↦baj with i odd.
Then ai⋅ai=a⋅ai=(a⋅a)ai-1=ak+i.
Thus k is transformed into k′ with ak+i=ai(k′+1).
Because of (5.1), this shows that k′=i-1k=k.
So k is invariant.
Assume first that j is even.
Then
ai⋅baj=a⋅baj=(a⋅b)aj=baℓ+j=bajaiℓ,
which shows that ℓ is invariant.
Now let j be odd.
Then
baj⋅baj=b⋅(a⋅baj)=b⋅((aj⋅a)⋅b)(a⋅aj)=b⋅(ak+1⋅b)(a⋅a)aj-1=b⋅baℓak+1aj-1=b⋅baℓ+k+j=((aℓ+k+j⋅b)⋅b)(b⋅aℓ+k+j)=(baℓ⋅b)(b⋅a)a1-ℓ-k-j=(b⋅b)a-ℓ-1a1-ℓ-k-j=ba-k-j.
To maintain equation (5.4), we have to assume that baj=ba-k-j.
Since 2m∣k, this is impossible.
∎
Thus it remains to verify that the four remaining cases of Proposition 8 can be realized.
Using equations (5.1)–(5.4), a straightforward calculation gives
ai⋅aj:={ajforiorjeven,ak+jfori,jodd,
ai⋅baj:={bajforieven,baℓ+jforiodd,jeven,baℓ+k+jfori,jodd,
bai⋅aj:={a-jforjeven,aℓ-jforieven,jodd,aℓ+k-jfori,jodd,
bai⋅baj:={ba-jfori,jeven,baℓ-jfori+jodd,bak-jfori,jodd.
At some places, we made use of the fact that -k≡k and -ℓ≡ℓ(mod2m+1) according to (5.1), (5.2).
It is easily checked that the equations define an affine structure on Q2m, hence a quaternion brace.
Thus we obtain our main result.
Theorem 5.
Let m⩾3 be an integer.
Up to isomorphism, there are 7 quaternion braces of order 2m+2, namely,
the brace A2 with |A2/Soc(A2)|=8,
the brace A3 with a2∈Soc(A3) and a⋅a∉〈a〉,
the 4 braces Ai,j with i,j∈{0,1}, where a2∈Soc(Ai,j),
a⋅a∈〈a〉 and b⋅b=b, given by the invariants k=2mi and ℓ=2mj in (5.1), (5.2).