Uniform stabilization for a strongly coupled semilinear/linear system
-
Marcelo M. Cavalcanti
 and
Mauro de Lima Santos
and
Mauro de Lima Santos

Abstract
In this manuscript, we analyze the exponential stability of a strongly coupled semilinear system of Klein-Gordon type, posed in an inhomogeneous medium
1 Introduction
1.1 Description of the problem
This article addresses the exponential stability of a semilinear wave equation system posed in an inhomogeneous medium and subject to Kelvin-Voigt and frictional dampings locally distributed:
where
where
Assumption 1.1
The nonnegative functions
We assume that
Assumption 1.2

The Kelvin-Voigt damping
It is worth mentioning that if
Admissible geometry for the frictional dissipations

Admissible geometries for the Kelvin-Voigt and frictional dissipations
Let us assume that the following hypothesis is also satisfied:
Assumption 1.3
As in [6], Assumption 1.3 is the so-called GCC. It is well-known that it is necessary and sufficient for stabilization and control of the linear wave equation, see [3,4,7,8,14,28] and references therein. For this reason and since in the present article we do not have any control of the geodesics because of the inhomogeneous medium we consider
According to [5], when we do not have any control on the geodesics of the metric
for all
for all geodesic

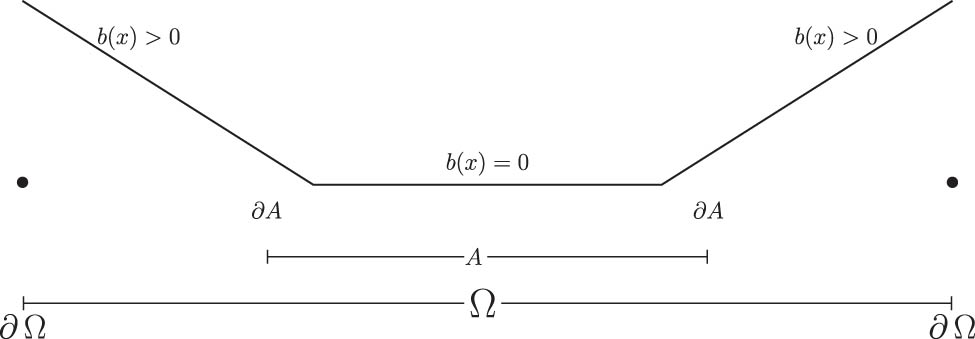
Totally distributed damping.
We observe that if

In the left side
One of the main ingredients for the stabilization of system (1.1) is a unique continuation principle, so we assume the following hypothesis:
Assumption 1.4
For every
where
Remark 1.1
This type of condition in Assumption 1.4 is generally assumed in control/stabilization statements and the possibility to overcome it to every setting seems to be an open question. We observe that Proposition 2.2 of [10] gives an example where the unique continuation principle holds at least locally. For more details see [9,13,20,29].
We also emphasize that Kelvin-Voigt-type dissipation plays a fundamental role in the passings to the limits in the proof of our main result, due to the coupling term introduced in this article.
1.2 Main goal, methodology, and previous results
The main objective of the present manuscript is to prove the existence and uniqueness for weak solutions to problem (1.1) and, in addition, that those solutions decay exponentially and uniformly to zero, that is, setting
there exist positive constants
for all weak solutions to problem (1.1), provided that the initial data
Inspired by Dehman et al. [13] or Dehman et al. [14] we give a direct proof of the inverse inequality to problem (1.1), namely, we prove that given
provided the initial data are taken in bounded sets of
To prove (1.6) and therefore the stability result, we argue by contradiction and we find a sequence of
when
Our wish is to propagate the convergence (1.7) from
First, we shall establish the convergence
which is enough to ensure that the
The problematic terms are precisely
This is the moment that the frictional dissipation
Assuming for a moment that
from which we deduce that inside the sets
From convergence (1.9) and an argument of equipartition of energy, we can conclude that
The model proposed in this article is inspired by an equation introduced by Segal in [30], given by
which describes the interaction of scalar fields
For a complete literature review on systems similar to the one proposed in this article, see [6] and references therein, for example: [1,2,11,12,15,16, 17,18,22, 23,24,25, 26,28,32].
There are two main difficulties regarding problem (1.1). The nature of dissipations and coupling terms generate unbounded operators and the presence of the coefficients in the wave operators, as considered in the present article, makes the analysis much more refined in terms of the rays of the geometrical optics. Furthermore, the coupling term introduced in this article requires a Kelvin-Voigt dissipation and as is well known, this type of dissipation can cause instability of the system. The main ingredients in the proof are as follows: (i) a unique continuation principle for systems and (ii) the propagation of the microlocal defect measure by the geodesic flow.
This article is organized as follows. In Section 2, we give some notations and we establish the well-posedness to problem (1.1). In Section 3, we give the proof of the stabilization which consists our main result. In Section 4, we describe the result that establishes the exponential stability for the linear equation associated with problem (1.1). Finally, in the appendix we recall some basic results of microlocal analysis.
2 Well-posedness
We consider the weak phase space
which is endowed with the inner product
Denoting
where the linear unbounded operator
that is,
with domain
and
Now, we are in conditions to state the well-posedness result for problem (2.1), which ensures that problem (1.1) is globally well-posed.
Theorem 2.1
(Global well-posedness) Assume that the hypotheses on
Proof
First of all the operator
which shows that the operator
From (2.7), we obtain
Substituting the equations of (2.8) in the last two equations of (2.7), we obtain
Equivalently,
Define
given by
Then,
there exists a unique
Taking
and consequently,
Proceeding in the same way, we deduce that
From the above we deduce that
which gives us the desired solution.
Moreover, by multiplying the third line of (2.7) by
and
It follows that
that is,
Indeed, let
Thus, for
This, together with the dissipativeness of
As in [6], it is easy to show that the nonlinear operator
Let us see that
which shows that
Thus,
Therefore, the local solutions cannot blow-up in finite time and it follows that
3 Exponential stability
In this section, we give the proofs of the main result of the present article which reads as follows:
Theorem 3.1
Under Assumptions
1.1, 1.2, 1.3, and
1.4, given
for all weak solutions to problem (1.1), provided that
Remark 3.1
By standard density arguments, it is enough to work with regular solutions at all times since the decay rate estimate given in (3.1) can be recovered for weak solutions as well.
In order to prove Theorem 3.1 and having in mind that problem (1.1) satisfies the semigroup property, so, in view of the identity of the energy associated with problem (1.1), namely,
it is enough to prove that the following observability estimate holds:
Lemma 3.1
For all
provided that
Proof
Our proof relies on contradiction arguments. So, if (3.3) is false, then there exists
In particular, for each
satisfying
From (3.6) we obtain
Let
Taking (3.5) and (3.7) into account, we deduce
On the other hand, from (3.8) and the Poincaré’s inequality combined with the properties of the dissipative effects, we obtain
and since that
Since
From standard compactness arguments, see [21] or [31], we deduce, for an eventual subsequence, which will be denoted by the same notation, that
From (3.13) we infer
and
Moreover,
Analogously, we have the another limitation. From the Lions lemma we conclude that
In this point, we shall divide our proof into two cases: (i)
and passing to the limit in (3.15) taking (3.8), (3.9), (3.10), and (3.11)–(3.14) into account, having in mind that
and for
which implies that
Case (i):
Taking the following subsequence of problems into account
and passing to the limit in (3.18) taking (3.8), (3.9), (3.10), and (3.11)–(3.14) into account, since
and for
Defining
Employing Assumption 1.4, we conclude that
Case (ii):
Now, we define:
Now, let us consider the following subsequence of problems:
A simple calculation shows that
It is not difficult to check that
and
From (3.25), (3.26), and the Poincaré’s inequality combined with the properties of the dissipative effects, we obtain
and since that
Furthermore, from the boundedness
From standard compactness arguments, we deduce, for an eventual subsequence, that it will be denoted by the same notation that
Note that, for an eventual subsequence,
Taking (3.25), (3.26), (3.29), (3.30), (3.31), (3.32), and (3.33) into account, passing to the limit in (3.23) we arrive at
For
which implies that
Now, let us consider
For
Denoting
Employing Assumption 1.4, from (3.38) it follows that
Hence, from (3.31) by applying also Hölder’s inequality, we obtain the following strong convergences:
Remember that our main objective is to prove that
Let us use the following notation:
Taking into account the convergences (3.25), (3.26), and (3.39) we deduce that
Let us also denote by
(i) From Theorem A.2, the supports of the measures
Our wish is to propagate the convergences (3.27) and (3.28) to the whole
The problematic terms are precisely
However, the frictional dampings
from which we deduce that inside the set
(ii)
Furthermore, from Proposition A.1 and Theorem A.4 found in the Appendix, we deduce that
where
Since
However, since
and
It is then easy to show that
Multiplying the first equation in (3.23) by
and
Considering the convergences (3.25), (3.26), (3.29)–(3.31), and (3.39) having in mind that
which implies that
We also have
Combining the above convergences we have that
Then by the decrease of the energy, we obtain
Combining the energy identity
with (3.25), (3.26), and the arbitrariness of
4 The linear case
Consider the problem
where the functions
Theorem 4.1
There exist constants
for all weak solution
Note that in this case, the exponential decay given in Theorem 4.1 remains valid without any restrictions to the dimension
-
Funding information: Research of Marcelo M. Cavalcanti is partially supported by the CNPq Grant 300631/2003-0. Research of Valéria N. Domingos Cavalcanti is partially supported by the CNPq Grant 304895/2003-2. Research of Victor Hugo Gonzalez Martinez was supported by FACEPE grant BFP-0065-1.01/21.
-
Conflict of interest: The authors state no conflict of interest.
Appendix A Microlocal analysis background
For the reader comprehension, we will announce some results which can be found in Burq and Gérard [5] and in Gérard [19] and were used in the proof of the exponential stabilization.
Theorem A.1
Let
Definition A.1
Under the circumstances of Theorem A.1
Remark A.1
Theorem A.1 assures that for all bounded sequence
so that
The second important result reads as follows.
Theorem A.2
Let
Theorem A.3
Let P be a differential operator of order
We finish this section by examining the case of the wave equation in an inhomogeneous medium:
whose principal symbol is given by
where
for
Proposition A.1
Unless a change of variables, the bicharacteristics of (A.6) are curves of the form
where
The main result is the following:
Theorem A.4
Let
References
[1] D. Andrade and A. Mognon, Global solutions for a system of Klein-Gordon equations with memory, Bol. Soc. Parana. Mat. (3) 21 (2003), no. 1–2, 127–138. 10.5269/bspm.v21i1-2.7512Search in Google Scholar
[2] M. Astudillo, M. M. Cavalcanti, V. N. Domingos Cavalcanti, R. Fukuoka, and A. B. Pampu, Uniform decay rate estimates for the semilinear wave equation in inhomogeneous medium with locally distributed nonlinear damping, Nonlinearity 31 (2018), no. 9, 4031–4064. 10.1088/1361-6544/aac75dSearch in Google Scholar
[3] C. Bardos, G. Lebeau, and J. Rauch, Sharp sufficient conditions for the observation, control, and stabilization of waves from the boundary, SIAM J. Control Optim. 30 (1992), no. 5, 1024–1065. 10.1137/0330055Search in Google Scholar
[4] N. Burq and P. Gérard, Condition nécessaire et suffisante pour la contrôlabilité exacte des ondes. (French) [A necessary and sufficient condition for the exact controllability of the wave equation], C. R. Acad. Sci. Paris Sér. I Math. 325 (1997), no. 7, 749–752. 10.1016/S0764-4442(97)80053-5Search in Google Scholar
[5] N. Burq and P. Gérard, Contrôle Optimal des équations aux dérivées partielles, 2001, http://www.math.u-psud.fr/burq/articles/coursX.pdfSearch in Google Scholar
[6] M. M. Cavalcanti, L. G. Delatorre, D. C. Soares, V. H. Gonzalez Martinez, and J. P. Zanchetta, Uniform stabilization of the Klein-Gordon system, Commun. Pure Appl. Anal. 19 (2020), no. 11, 5131–5156. 10.1063/1.5136100Search in Google Scholar
[7] M. M. Cavalcanti, V. N. Domingos Cavalcanti, R. Fukuoka, and J. A. Soriano, Asymptotic stability of the wave equation on compact surfaces and locally distributed damping-a sharp result, Trans. Amer. Math. Soc. 361 (2009), no. 9, 4561–4580. 10.1090/S0002-9947-09-04763-1Search in Google Scholar
[8] M. M. Cavalcanti, V. N. Domingos Cavalcanti, R. Fukuoka, and J. A. Soriano, Asymptotic stability of the wave equation on compact manifolds and locally distributed damping: a sharp result, Arch. Ration. Mech. Anal. 197 (2010), no. 3, 925–964. 10.1007/s00205-009-0284-zSearch in Google Scholar
[9] M. M. Cavalcanti, V. N. Domingos Cavalcanti, V. H. Gonzalez Martinez, V. A. Peralta, and A. Vicente, Stability for semilinear hyperbolic coupled system with frictional and viscoelastic localized damping, J. Differ. Equ. 269 (2020), 8212–8268. 10.1016/j.jde.2020.06.013Search in Google Scholar
[10] M. M. Cavalcanti, V. N. Domingos Cavalcanti, S. Mansouri, V. H. Gonzalez Martinez, Z. Hajjej, M. R. Astudillo Rojas, Asymptotic stability for a strongly coupled Klein-Gordon system in an inhomogeneouns medium with locally distributed damping, J. Differ. Equ. 268 (2020), 447–489. 10.1016/j.jde.2019.08.011Search in Google Scholar
[11] M. M. Cavalcanti, V. N. Domingos Cavalcanti, J. S. Prates Filho, and J. A. Soriano, Existence and uniform decay of a degenerate and generalized Klein-Gordon system with boundary damping, Commun. Appl. Anal. 4 (2000), no. 2, 173–196. Search in Google Scholar
[12] A. T. Cousin, C. L. Frota, and N. A. Larkin, On a system of Klein-Gordon type equations with acoustic boundary conditions, J. Math. Anal. Appl. 293 (2004), no. 1, 293–309. 10.1016/j.jmaa.2004.01.007Search in Google Scholar
[13] B. Dehman, P. Gérard, and G. Lebeau, Stabilization and control for the nonlinear Schrödinger equation on a compact surface, Math. Z. 254 (2006), no. 4, 729–749. 10.1007/s00209-006-0005-3Search in Google Scholar
[14] B. Dehman, G. Lebeau, and E. Zuazua, Stabilization and control for the subcritical semilinear wave equation, Anna. Sci. Ec. Norm. Super. 36 (2003), 525–551. 10.1016/S0012-9593(03)00021-1Search in Google Scholar
[15] J. S. Ferreira, Asymptotic behavior of the solutions of a nonlinear system of Klein-Gordon equations, Nonlinear Anal. 13 (1989), no. 9, 1115–1126. 10.1016/0362-546X(89)90098-9Search in Google Scholar
[16] J. S. Ferreira, Exponential decay for a nonlinear system of hyperbolic equations with locally distributed dampings, Nonlinear Anal. 18 (1992), no. 11, 1015–1032. 10.1016/0362-546X(92)90193-ISearch in Google Scholar
[17] J. S. Ferreira, Exponential decay of the energy of a nonlinear system of Klein-Gordon equations with localized dampings in bounded and unbounded domains, Asymptotic Anal. 8 (1994), no. 1, 73–92. 10.3233/ASY-1994-8105Search in Google Scholar
[18] J. Ferreira and G. P. Menzala, Decay of solutions of a system of nonlinear Klein-Gordon equations, Int. J. Math. Math. Sci. 9 (1986), no. 3, 471–483. 10.1155/S0161171286000601Search in Google Scholar
[19] P. Gérard, Microlocal defect measures, Comm. Partial Differ. Equ. 16 (1991), 1761–1794. 10.1080/03605309108820822Search in Google Scholar
[20] H. Koch and D. Tataru, Dispersive estimates for principally normal pseudodifferential operators, Commun. Pure Appl. Math. 58 (2005), no. 2, 217–284. 10.1002/cpa.20067Search in Google Scholar
[21] J. L. Lions, Quelques Méthodes de Résolution des Problèmes Aux Limites Non Linéaires, Dunod, Guthier-Villars, 1969. Search in Google Scholar
[22] K. Liu and K. Liu, Exponential decay of energy of the Euler-Bernoulli beam with locally distributed Kelvin-Voigt damping, SIAM J. Control and Optim. 36 (1998), 1086–1098. 10.1137/S0363012996310703Search in Google Scholar
[23] K. Liu and B. Rao, Exponential stability for the wave equations with local Kelvin-Voigt damping, Z. Angew. Math. Phys. 57 (2006), 419–432. 10.1007/s00033-005-0029-2Search in Google Scholar
[24] L. A. Medeiros and G. P. Menzala, On a mixed problem for a class of nonlinear Klein-Gordon equations, Acta Math. Hungar. 52 (1988), no. 1–2, 61–69. 10.1007/BF01952481Search in Google Scholar
[25] L. A. Medeiros and M. M. Miranda, Weak solutions for a system of nonlinear Klein-Gordon equations, Ann. Mat. Pura Appl. 146 (1987), no. 3, 173–183. 10.1007/BF01762364Search in Google Scholar
[26] L. A. Medeiros and M. M. Miranda, On the existence of global solutions of a coupled nonlinear Klein-Gordon equations, Funkcial. Ekvac. 30 (1987), no. 1, 147–161. Search in Google Scholar
[27] A. Pazy, Semigroups of linear operators and applications to partial differential equations, Applied Mathematical Sciences 44, Springer-Verlag, New York, 1983. 10.1007/978-1-4612-5561-1Search in Google Scholar
[28] J. Rauch and M. Taylor, Decay of solutions to nondissipative hyperbolic systems on compact manifolds, Comm. Pure Appl. Math. 28(1975), no. 4, 501–523. 10.1002/cpa.3160280405Search in Google Scholar
[29] A. Ruiz, Unique continuation for weak solutions of the wave equation plus a potential, J. Math. Pures. Appl. 71 (1992), 455–467. Search in Google Scholar
[30] I. E. Segal, Nonlinear partial differential equations in quantum field theory, in: Proceedings of Symposia in Applied Mathematics, Vol. XVII, American Mathematical Society, Providence, R.I., 1965. 10.1090/psapm/017/0202406Search in Google Scholar
[31] J. Simon, Compact Sets in the space Lp(0,T,B), Ann. Mat. Pura Appl. 146 (1987), 65–96. 10.1007/BF01762360Search in Google Scholar
[32] L. Tebou, Stabilization of some elastodynamic systems with localized Kelvin-Voigt damping, Discrete Contin Dyn Sys. 36 (2016), 7117–7136. 10.3934/dcds.2016110Search in Google Scholar
© 2022 Marcelo M. Cavalcanti et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Editorial
- A sharp global estimate and an overdetermined problem for Monge-Ampère type equations
- Non-degeneracy of bubble solutions for higher order prescribed curvature problem
- On fractional logarithmic Schrödinger equations
- Large solutions of a class of degenerate equations associated with infinity Laplacian
- Chemotaxis-Stokes interaction with very weak diffusion enhancement: Blow-up exclusion via detection of absorption-induced entropy structures involving multiplicative couplings
- Asymptotic mean-value formulas for solutions of general second-order elliptic equations
- Weighted critical exponents of Sobolev-type embeddings for radial functions
- Existence and asymptotic behavior of solitary waves for a weakly coupled Schrödinger system
- On the Lq-reflector problem in ℝn with non-Euclidean norm
- Existence of normalized solutions for the coupled elliptic system with quadratic nonlinearity
- Normalized solutions for a class of scalar field equations involving mixed fractional Laplacians
- Multiplicity and concentration of semi-classical solutions to nonlinear Dirac-Klein-Gordon systems
- Multiple solutions to multi-critical Schrödinger equations
- Existence of solutions to contact mean-field games of first order
- The regularity of weak solutions for certain n-dimensional strongly coupled parabolic systems
- Uniform stabilization for a strongly coupled semilinear/linear system
- Existence of nontrivial solutions for critical Kirchhoff-Poisson systems in the Heisenberg group
- Existence of ground state solutions for critical fractional Choquard equations involving periodic magnetic field
- Least energy sign-changing solutions for Schrödinger-Poisson systems with potential well
- Lp Hardy's identities and inequalities for Dunkl operators
- Global well-posedness analysis for the nonlinear extensible beam equations in a class of modified Woinowsky-Krieger models
- Gradient estimate of the solutions to Hessian equations with oblique boundary value
- Sobolev-Gaffney type inequalities for differential forms on sub-Riemannian contact manifolds with bounded geometry
- A Liouville theorem for the Hénon-Lane-Emden system in four and five dimensions
- Regularity of degenerate k-Hessian equations on closed Hermitian manifolds
- Principal eigenvalue problem for infinity Laplacian in metric spaces
- Concentrations for nonlinear Schrödinger equations with magnetic potentials and constant electric potentials
- A general method to study the convergence of nonlinear operators in Orlicz spaces
- Existence of ground state solutions for critical quasilinear Schrödinger equations with steep potential well
- Global existence of the two-dimensional axisymmetric Euler equations for the Chaplygin gas with large angular velocities
- Existence of two solutions for singular Φ-Laplacian problems
- Existence and multiplicity results for first-order Stieltjes differential equations
- Concentration-compactness principle associated with Adams' inequality in Lorentz-Sobolev space
Articles in the same Issue
- Research Articles
- Editorial
- A sharp global estimate and an overdetermined problem for Monge-Ampère type equations
- Non-degeneracy of bubble solutions for higher order prescribed curvature problem
- On fractional logarithmic Schrödinger equations
- Large solutions of a class of degenerate equations associated with infinity Laplacian
- Chemotaxis-Stokes interaction with very weak diffusion enhancement: Blow-up exclusion via detection of absorption-induced entropy structures involving multiplicative couplings
- Asymptotic mean-value formulas for solutions of general second-order elliptic equations
- Weighted critical exponents of Sobolev-type embeddings for radial functions
- Existence and asymptotic behavior of solitary waves for a weakly coupled Schrödinger system
- On the Lq-reflector problem in ℝn with non-Euclidean norm
- Existence of normalized solutions for the coupled elliptic system with quadratic nonlinearity
- Normalized solutions for a class of scalar field equations involving mixed fractional Laplacians
- Multiplicity and concentration of semi-classical solutions to nonlinear Dirac-Klein-Gordon systems
- Multiple solutions to multi-critical Schrödinger equations
- Existence of solutions to contact mean-field games of first order
- The regularity of weak solutions for certain n-dimensional strongly coupled parabolic systems
- Uniform stabilization for a strongly coupled semilinear/linear system
- Existence of nontrivial solutions for critical Kirchhoff-Poisson systems in the Heisenberg group
- Existence of ground state solutions for critical fractional Choquard equations involving periodic magnetic field
- Least energy sign-changing solutions for Schrödinger-Poisson systems with potential well
- Lp Hardy's identities and inequalities for Dunkl operators
- Global well-posedness analysis for the nonlinear extensible beam equations in a class of modified Woinowsky-Krieger models
- Gradient estimate of the solutions to Hessian equations with oblique boundary value
- Sobolev-Gaffney type inequalities for differential forms on sub-Riemannian contact manifolds with bounded geometry
- A Liouville theorem for the Hénon-Lane-Emden system in four and five dimensions
- Regularity of degenerate k-Hessian equations on closed Hermitian manifolds
- Principal eigenvalue problem for infinity Laplacian in metric spaces
- Concentrations for nonlinear Schrödinger equations with magnetic potentials and constant electric potentials
- A general method to study the convergence of nonlinear operators in Orlicz spaces
- Existence of ground state solutions for critical quasilinear Schrödinger equations with steep potential well
- Global existence of the two-dimensional axisymmetric Euler equations for the Chaplygin gas with large angular velocities
- Existence of two solutions for singular Φ-Laplacian problems
- Existence and multiplicity results for first-order Stieltjes differential equations
- Concentration-compactness principle associated with Adams' inequality in Lorentz-Sobolev space