Lower and upper estimates of semi-global and global solutions to mixed-type functional differential equations
-
J. Diblík
 und
G. Vážanová
und
G. Vážanová

Abstract
In the paper, nonlinear systems of mixed-type functional differential equations are analyzed and the existence of semi-global and global solutions is proved. In proofs, the monotone iterative technique and Schauder-Tychonov fixed-point theorem are used. In addition to proving the existence of global solutions, estimates of their co-ordinates are derived as well. Linear variants of results are considered and the results are illustrated by selected examples.
1 Introduction
In the paper, the existence is considered of semi-global and global solutions to what is called mixed-type (or advanced-delayed) functional differential equations. Although the existence of global solutions to various classes of functional differential equations has been investigated for some time, most of the papers only deal with semi-global solutions of delayed equations or advanced equations, or with mixed-type equations on finite intervals.
Mixed-type functional differential equations are considered, for example, in the books [1, 18, 30] and in the papers [2, 3, 5, 6, 7, 13, 16, 22, 23, 24, 25, 26, 28, 32]. In [25], exponential dichotomies and Wiener-Hopf factorizations for mixed type equations are discussed. The paper [5] develops monotonic iterations to find solutions to systems exhibiting bistable dynamics while [28] applies a fixed-point technique to determine asymptotic properties of linear mixed-type equations on right-infinite intervals.
Such types of mixed-type equations have found applications in various fields such as optimal control problems, biology, traveling wawes, and economics (we refer, for example, to [2, 5, 6, 7, 22, 25, 30, 32] and to the references therein).
1.1 Preliminaries
By
Let 𝒥 ⊆ ℝ be an interval. By C (𝒥, ℝn) denote the Banach space of bounded continuous functions from 𝒥 to ℝn equipped with the norm ∥ψ∥r = supα∈𝒥 |ψ(α)| where ψ ∈ C (𝒥, ℝn) with the last norm (used throughout the paper) being defined by |ψ(α)| := max{|ψ1(α)|, . . . , |ψn(α)|}. If 𝒥 := [0, r], where r > 0 is fixed, the relevant Banach space is denoted by Cr.
For a function y, continuous on an interval [t − r1, t], t ∈ ℝ, r1 > 0, define a delayed-type function yt ∈ Cr1 by yt(τ) = y(t − τ) where τ ∈ [0, r1]. Similarly, for a function y, continuous on an interval [t, t + r2], t ∈ ℝ, r2 > 0, define an advanced-type function yt ∈ Cr2 by yt (σ) = y(t + σ) where σ ∈ [0, r2].
Let t0 ∈ ℝ be fixed and let 𝒥 ⊆ ℝ be a set having one of the forms 𝒥 = 𝒥+ := [t0, ∞), 𝒥 = 𝒥− := (−∞, t0] or 𝒥 = ℝ. In the paper, we will consider a system of mixed-type functional differential equations
where y = (y1, . . . , yn), f = (f1, . . . , fn) : 𝒥 × Cr1 × Cr2 → ℝn is a continuous quasi-bounded functional which satisfies a local Lipschitz condition with respect to the second and the third arguments in the domains considered. The well-known definitions of quasi-boundedness and local Lipschitz condition can be found, e.g., in [15].
We say that a continuous function y :
1.2 The problem description and structure of the paper
Concerned with the problems of existence of semi-global and global solutions to (1.1) the paper has the following structure. The next Section 2 is about the existence of right semi-global solutions while Section 3 deals with the existence of left semi-global solutions. In these sections we use a monotone iterative method (for rudiments of this method we refer, e.g., to [17, 27, 31, 33]) in proofs. Section 4 discusses the existence of semi-global solutions without assuming monotonicity of the relevant operators using Schauder-Tychonoff fixed point theorem instead (for fixed point theory we refer, e.g., to [27], for applications of Schauder-Tychonoff fixed point theorem in functional differential equations, we refer, e.g., to [18, 29]). The outcomes concerning the existence of global solutions are described in Section 5 where the monotone iterative method and Schauder-Tychonoff fixed point theorem are used in the proofs. The last Section 6 formulates some conclusions and open problems discussing relationships with previous results.
In the paper, some particular linear variants of general nonlinear statements are considered as well. To point out the wide range of applicability of the results, we use selected examples. By the methods and technique used, upper and lower estimates by exponential-type functions can be found of the co-ordinates of semi-global and global solutions. In the case of scalar examples, we omit the indices used for systems. When linear equations are considered, we do not mention the obvious fact that, along with the solution, there exists a family of linearly dependent solutions.
2 Right Semi-Global Solutions
In this section we prove a general theorem on the existence of right semi-global solutions to mixed-type system (1.1). Since the proof is based on an iterative process, we also use it to derive sequences of functions converging to these solutions. As a similar process is employed several times in the paper, its proof is given in detail to be referred to by subsequent, more concise proofs. Section 2.1 considers a partial linear case and the speed of the convergence of monotone sequences is discussed in Section 2.2.
Define a mapping
where I(k, λ) = (I1(k, λ), . . . , In(k, λ)),
Below we assume that a solution of system (1.1) on
with suitable k and λ. Substituting (2.2) into (1.1), for t ∈ 𝒥+ we get
or, since the matrix diag(I(k, λ)(t)) with entries defined by (2.1), (2.2) is regular,
Similar transformations are used, without detailed explanation, in the sequel. Equation (2.3) is an operator equation with respect to λ. A function
Define an operator
The following theorem gives conditions sufficient for the existence of a right semi-global solution to equation (2.3).
Theorem 1
Let us assume that
For any fixed M ≥ 0, θ > t0 there exists a constant K such that, for all t, t′ ∈ [t0, θ] and for any continuous function λ :
(2.4)There exist bounded continuous functions ℒ, ℛ:
(2.5)There exists a Lipschitz continuous function φ : [t0 − r1, t0] → ℝn satisfying φ (t0) = 0 and
(2.6)For any locally integrable functions λ*, μ* :
implies
(2.7)
Then, there exists a right semi-global solution y :
where νi(t) ≤ νi+1(t), μj+1(t) ≤ μj(t), νi(t) ≤ μj(t), ν0(t) := ℒ(t), μ0(t) := ℛ(t),
Moreover, there exist continuous limits
defining right semi-global solutions yν(t) = I(k, ν)(t), yμ(t) = I(k, μ)(t), yν, yμ :
where i ≥ 0 and j ≥ 0 are arbitrary.
Proof
To prove that equation (2.3), i.e., λ(t) = (Tλ)(t), t ∈ 𝒥+ has a solution
Let
By the definition of the operator T, we conclude that G is well-defined.
The rest of the proof will be divided into three parts. In the first one, we construct auxiliary motonone iterative sequences. In the second one, the compactness of the operator G is proved while, in the third one, we show that these sequences are convergent as the monotone iterative methods can be applied.
Monotone iterative sequences. The operator T satisfies inequality (2.7) in assumption (iv). This implies that the operator G is monotone increasing (by Definition 7.6, part (2), [33]). Generate a sequence of functions
We remark that, by inequality (2.5) in (ii) and by (2.11), we have ν0(t) ≤ ν1(t), t ∈ [t0, ∞). By inequality (2.6) in (iii) and by (2.11), we have ν0(t) ≤ ν1(t), t ∈ [t0 − r1, t0]. Therefore, ν0(t) ≤ ν1(t),
we state that νi*+1(t) ≤ νi*+2(t),
But the latter inequality follows from inequality (2.12).
Formula (2.7) assumes that νi(t) ≤ ℛ(t), i = 0, 1, …,
Then,
and
which verifies correctness. Therefore, the terms of the sequence
Now, generate a sequence of functions
In much the same way as above, using properties (ii) − (iv) and the definition of G, we can prove that
Using again inequality (2.7) in assumption (iv) and the definition of G, we conclude that, for every i ≥ 0 and every j ≥ 0,
Consequently, summarizing the properties of sequences
where i = 0, 1, . . . , and

To the proof of Theorem 1.
Compactness of G. Now, we will prove that G is a compact operator. It is easy to see that G is continuous. Let 𝒩 be a bounded subset of L such that |λ| ≤ M on
Let us verify the equicontinuity of G𝒩. We need to find a constant K* such that
for every λ ∈ 𝒩 and t, t′ ∈ [t0 − r1, θ]. By the definition of G, it is sufficient to estimate the difference ℒG for the following three cases,
Case I),
where Lφ is a Lipschitz constant to the function φ. Case II), according to (2.4),
Case III), using the fact, that φ(t0) = 0, inequality (2.4), and Lipschitz continuity of φ(t), we obtain
Summarizing the cases (2.18)–(2.20), the inequality (2.17) holds for K* := K+Lφ. Therefore, G𝒩 is equicontinuous.
The boundedness of G𝒩 is guaranteed due to the boundedness of φ, the quasiboundedness of f, and the fact that, for i = 1, . . . , n and |λ| ≤ M,
Thus, we have shown that G is a compact operator.
The theorem applied to monotone iterative sequences. Now, we are ready to apply Theorem 7.A in [33, p. 283]. The function ν0(t) satisfies ν0(t) ≤ (Gν0)(t) and is a subsolution of the operator G whereas μ0(t), satisfying μ0(t) ≥ (Gμ0)(t), is its supersolution. Since all the hypotheses of the theorem hold, the iterative sequence
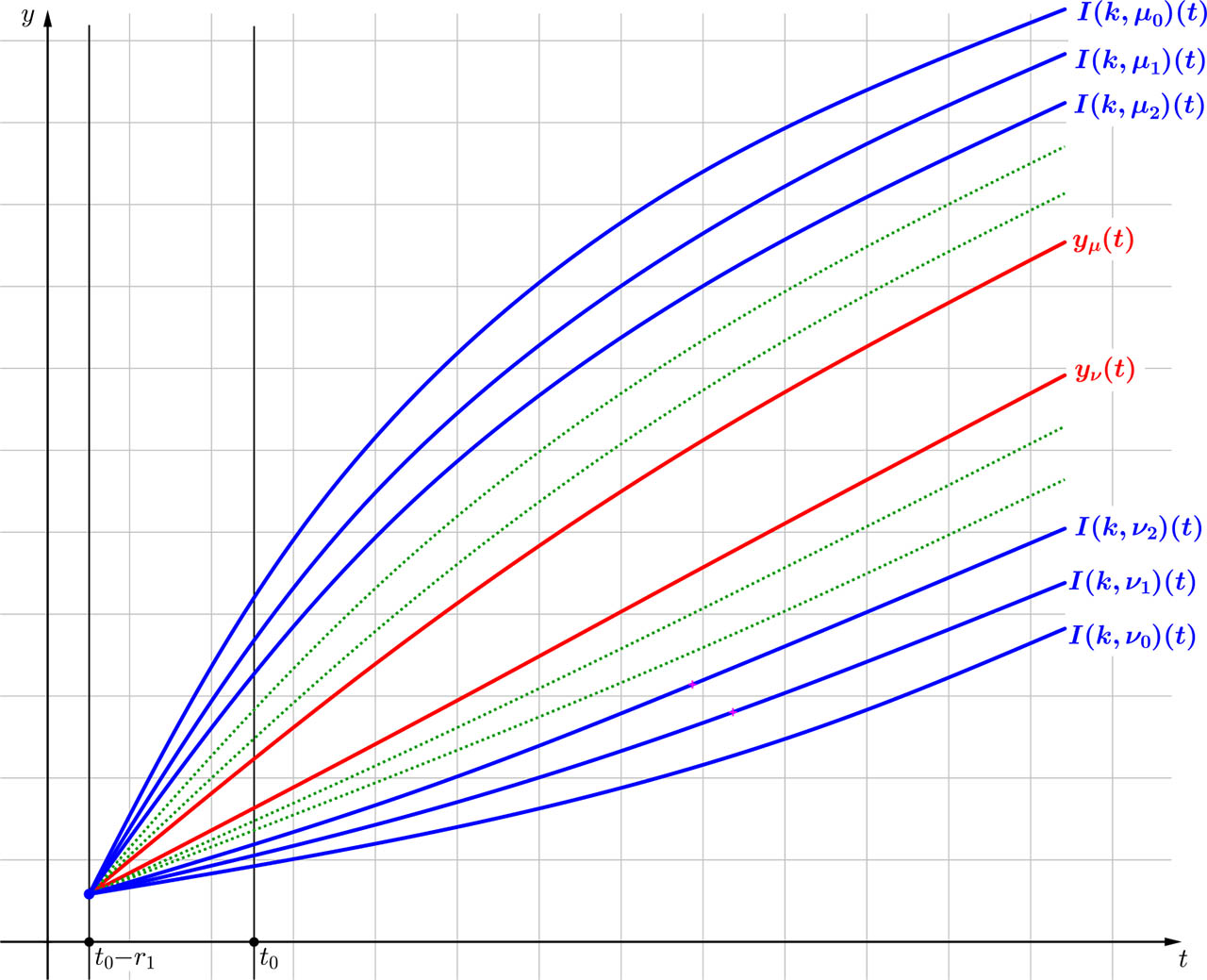
The functions λ(t) := ν(t) ∈ L, λ(t) := μ(t) ∈ L are fixed points of the operator G and, because of the relation between G and T defined by (2.11) and (2.2), functions y(t) = yν(t) = I(k, ν)(t), y(t) = yμ(t) = I(k, μ)(t) are solutions of the equation (2.3) as well. A visualization is in Figure 2. The remaining properties formulated in the theorem are immediate consequences of the properties of the iterative process.
To the proof of Theorem 1.
Example 1
Let us prove the existence of a right semi-global positive solution to the nonlinear equation
We have n = 1, r1 = r2 = 1. Let t0 = 1. Then, 𝒥+ = [1, ∞)
,
Apply now Theorem 1. Let k ∈ (0, 1] be fixed. It is easy to see that condition (i) is fulfilled. Functions ℒ, ℛ:
and
Condition (iii) holds obviously if φ(t) := 0, t ∈ [0, 1]. Condition (iv) holds as well since, as follows from (2.22), for any two continuous functions λ, μ :
If we set i = j = 1, then
and inequality (2.23) can be improved to
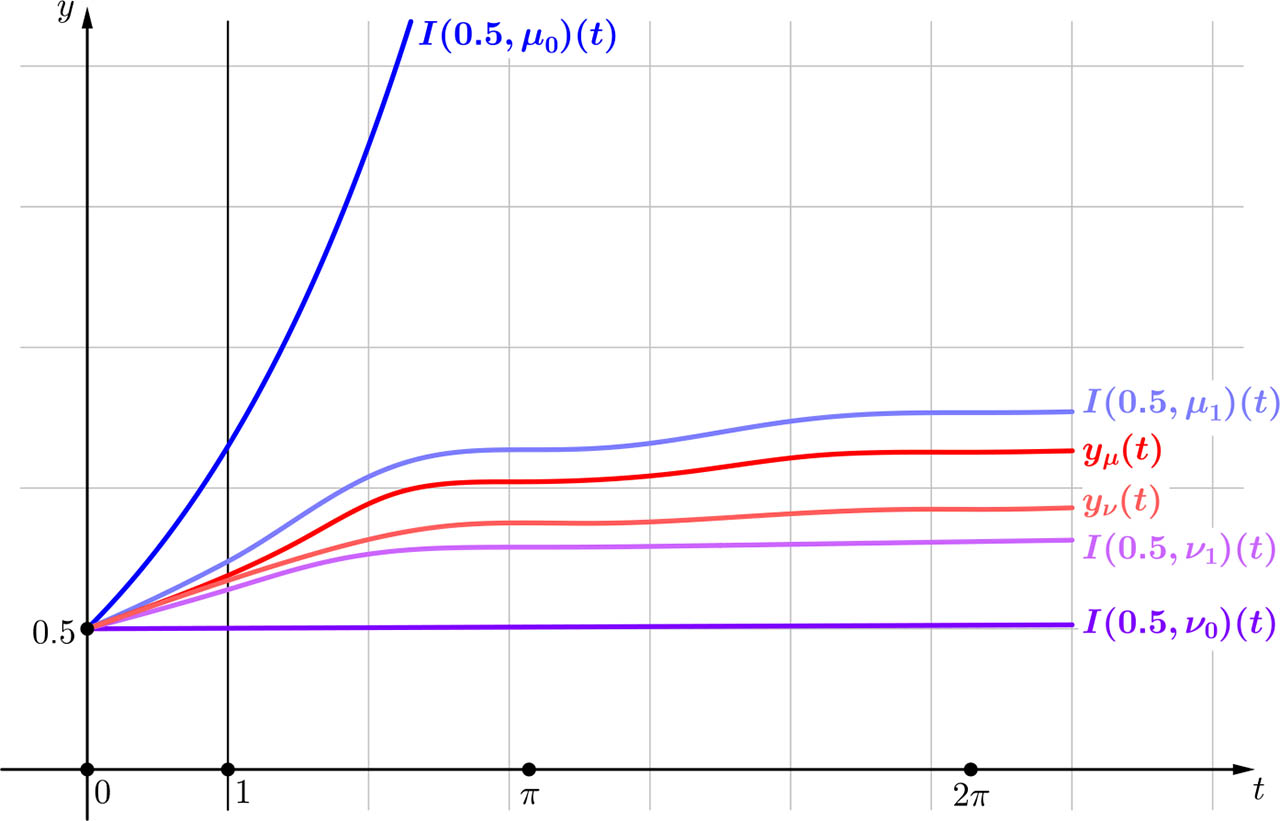
Both integrals can be easily computed, but the results are too cumbersome to write down. Rather, we refer to to Figure 3 which, for k = 0.5, depicts the “starting” functions (a subsolution and a supersolution) ν0 = ℒ, μ0 = ℛ, their images(by operator T) ν1, μ1, and possible limits ν, μ. Figure 4 shows the behaviour of I(0.5, ν0)(t), I(0.5, ν1)(t), I(0.5, μ0)(t), I(0.5, μ1)(t) and possible solutions yν(t), yμ(t). It can be seen that, for the case considered, the function I(0.5, μ1)(t) (i.e. the right-hand side of (2.24)) substantially improves the right-hand side of (2.23) given by I(0.5, μ0)(t).

To Example 1.
To Example 1.
Example 2
Let n = 2. Consider a non-linear system
Let t0 = 1. We have r1 = r2 = 1, t0 = 1, 𝒥+ = [1, ∞) and
Let ℒi(t) = 0, ℛi(t) = 1, i = 1, 2. Condition (i) of Theorem 1 is obviously fulfilled and we omit its verification. Let us show that condition (ii) holds. The first inequality in (2.5), L(t) ≤ (Tℒ)(t), is fulfilled because the right-hand sides of inequalities (2.27), (2.28) are positive. The second inequality, ℛ(t) ≥ (Tℛ)(t) in (2.5) holds as well, as given by the below estimates
For the choice φ(t) ≡ 0, t ∈ [0, 1], the condition (iii) holds as a consequence of (ii) and the fact that functions ℒ, ℛ are constant. Inequality (2.7) in condition (iv) holds as well, this is because t ≥ t0 = 1, as can be easily derived from the right-hand sides of (2.27), (2.28) defining the operator (Tλ)(t). By Theorem 1 (where i = j = 0 in (2.8)), there exists a right semi-global solution y = (y1, y2) of (2.25), (2.26) on
2.1 Right semi-global solutions in a linear case
In this section we will consider a scalar linear equation, as a particular case of equation (1.1),
where the functions c, d : 𝒥+ → [0, ∞), τ : 𝒥+ → [0, r1] and σ : 𝒥+ → [0, r2] are Lipschitz continuous.
Theorem 2
Consider bounded continuous functions ℒ, ℛ:
on 𝒥+ and
on [t0 − r1, t0]. Then, there exists a right semi-global solution y(t) of (2.29) on
where νi(t) ≤ νi+1(t), μj+1(t) ≤ μj(t), νi(t) ≤ μj(t), ν0(t) := ℒ(t), μ0(t) := ℛ(t),
Moreover, there exist continuous limits ν(t) = limi→∞ νi(t), μ(t) = limj→∞ μj(t), ν(t) ≤ μ(t),
and, for arbitrary indexes i ≥ 0, j ≥ 0,
Proof
Let us apply Theorem 1 to prove the existence of a solution to (2.29). Set k = 1. Then,
First, we verify condition (i). In the considered case,
Let us estimate the left-hand side of (2.4). We derive
For |λ| ≤ M, τ(t) ≤ r1 and σ(t) ≤ r2,
Because of the Lipschitz continuity of functions c and d, there exist constants Lc and Ld such that |c(t) − c(t′)| ≤ Lc |t − t′|, |d(t) − d(t′)| ≤ Lc |t − t′| and, by Lagrange mean value theorem,
for some a between
Consequently,
In much the same way as above, using Lagrange mean value theorem and Lipschitz continuity of σ with Lipschitz constant Lσ,
Summarizing the estimates (2.36)–(2.39), we see that condition (i) holds if
where Mc and Md are upper bounds for c and d on [t0, θ].
Second, condition (ii) is a direct consequence of inequalities (2.30), (2.31) and (iii) holds due to (2.32), (2.33). Finally, it is easy to see that (iv) holds, i.e., for any two continuous functions λ*, μ* :
Example 3
In this example we show that whether inequalities (2.32), (2.33) hold may depend a great deal on a suitable choice of the function φ in Theorem 2. We will prove the existence of right semi-global solutions to a scalar equation
which is a (2.29)-type equation for τ(t) = 1, σ(t) = 1, c(t) = e(8t3)−1 and d(t) = e−1(1 + 1/(8t2))−1. We have r1 = r2 = 1. Assume that t0 is sufficiently large. Applying this tacitly below, let us further assume that the expressions in consideration are well-defined and the asymptotic computations are correct. We will show that there exists a positive solution to (2.40) on
where δ ∈ ℝ. Let numbers δ1 and δ2 be chosen in such a way that inequality (2.30) with ℒ := λδ1 and inequality (2.31) with ℛ := λδ2 hold. Omitting long computations, the following asymptotic decompositions can be derived where the symbol o stands for the Landau order symbol small “o”. This is possible by using asymptotic representations for functions (arising when integrals are computed) of the type (t − p)q, lnq(t − p) where t → ∞ and p, q ∈ ℝ, we refer, e.g., to formulas in [9], Lemmas 4.1, 4.2. The right-hand side of (2.30) equals
and (2.30) will hold if
that is, if δ1 < 0 or if δ1 > 2. Similarly, for the right-hand side of (2.31), we get
and (2.31) will hold if
that is, if δ2 ∈ (0, 2). Fix a δ1 < 0 and δ2 ∈ (0, 2), then ℒ < ℛ and inequalities (2.30), (2.31) hold. Let φ(t) := ℛ(t) − ℛ(t0) = λδ2 (t) − λδ2 (t0), t ∈ [t0 − 1, t0]. Then, after asymptotic computations, inequality (2.32) can be simplified to
This inequality holds because its left-hand side is non-positive and right-hand side is positive. Inequality (2.33) holds as well because it is a consequence of (2.31) if t = t0. All the hypotheses of Theorem 2 hold and, by inequality (2.34) where i = j = 0, there exists a solution y(t) of equation (2.40) on
where t ∈ [t0 − 1, ∞). Inequalities (2.41) give a fitting description of the asymptotic behaviour of y(t). Note that we have obtained it thanks to an appropriate choice of the function φ.
We will show why the choice of φ(t) ≡ 0, t ∈ [t0 − 1, t0] is unsuitable here. The reason is that, then, (2.32) implies that, for all suficiently large values of t,
In the above inequality, set t = t0 − 1 as the admissible value rewriting it in an equivalent form
Letting t0 → ∞ we easily conclude that the limits of all terms are zeros, except for the first one, and that the inequality takes the form 1 ≤ 0. So, such a choice of φ is impossible.
2.2 On the convergence of iterative process
Let us take an example of the autonomous equation (2.29),
with a solution y(t) = exp(2t) to illustrate the iterative process. Here c(t) = exp(0.02), d(t) = 3 exp(−0.02) and τ(t) = r1 = 0.01, σ(t) = r2 = 0.01. For ℒ(t) = μ0(t) = 1, ℛ(t) = ν0(t) = 3, φ(t) = 0, all the hypotheses of Theorem 2 are fulfilled (the value t0 can be arbitrary). The operator T defined by (2.35), where λ is assumed a constant function, reduces to
and
One of the fixed points of T is the value λ = 2. Computation in Matlab for i = 1, . . . , 7 reveals that the above sequences converge very fast to this limit value, as shown in Table 1. From formula (2.34) with t0 = 1, we conclude that there exists a solution y = y(t) of equation (2.42) such that y(0) = 1 and eνi t ≤ y(t) ≤ eμi t, i = 0, 1, . . . , t ∈ [0, ∞).
Convergence of iterative sequences.
| i = 0 | ν0 = 1 | μ0 = 3 |
| i = 1 | ν1 = 1.960099334 | μ1 = 2.040100667 |
| i = 2 | ν2 = 1.998404132 | μ2 = 2.001604188 |
| i = 3 | ν3 = 1.999936166 | μ3 = 2.000064168 |
| i = 4 | ν4 = 1.999997447 | μ4 = 2.000002567 |
| i = 5 | ν5 = 1.999999898 | μ5 = 2.000000103 |
| i = 6 | ν6 = 1.999999996 | μ6 = 2.000000004 |
| i = 7 | ν7 = 1.999999999 | μ7 = 2.000000000 |
| . . . | . . . | . . . |
| i = ∞ | ν = 2 | μ = 2 |
3 Left Semi-Global Solutions
The goal of this section is to prove the existence of left semi-global solutions to mixed-type system (1.1). Theorem 3 below is a modification of Theorem 1 for the existence of a left semi-global solution of (1.1). A linear particular case is considered in section 3.1 as well.
Define a mapping
where
We are looking for a solution of system (1.1) in the form y(t) = I*(k, λ)(t),
where
Theorem 3
Let us assume that
For any M ≥ 0, θ < t0, there exists a constant K, such that, for all t, t′ ∈ [θ, t0] and for any continuous function λ :
There exist bounded continuous functions ℒ, ℛ:
(3.2)There exists a Lipschitz continuous function φ : [t0, t0 + r2] → ℝn satisfying φ(t0) = 0 and
For any locally integrable functions λ*, μ* :
(3.3)
Then, there exists a left semi-global solution y :
where νi(t) ≤ νi+1(t), μj+1(t) ≤ μj(t), νi(t) ≤ μj(t), ν0(t) := ℒ(t), μ0(t) := ℛ(t),
Moreover, there exist continuous limits
defining left semi-global solutions yν(t) = I*(k, ν)(t), yμ(t) = I*(k, μ)(t), yν, yμ :
where i ≥ 0, j ≥ 0 are arbitrary.
Proof
The proof is similar to the proof of Theorem 1 with minor changes. We search for the solution
The remaining parts of the proof can be modified easily.
Example 4
Let n = 1 and let (1.1) be reduced to a nonlinear equation
Set t0 = −1. Then, since r1 = r2 = 1, we have J− = (−∞, −1] and
Condition (i) can be simply verified and we omit the technical details. Condition (ii) with inequalities (3.2) hold for ℒ, ℛ:
and
The choice φ(t) := 0, t ∈ [−1, 0] implies that condition (iii) holds. Moreover, for any locally integrable functions λ, μ :
3.1 Left semi-global solutions in a linear case
In this section, linear equation (2.29) is considered assuming that functions c, d : 𝒥− → [0, ∞), τ : 𝒥− → [0, r1] and σ : 𝒥− → [0, r2] are Lipschitz continuous.
Theorem 4
Let there be bounded continuous functions ℒ, ℛ:
on 𝒥− and
on [t0, t0 + r2]. Then, there exists a left semi-global solution y(t) of (2.29) on
where νi(t) ≤ νi+1(t), μj+1(t) ≤ μj(t), νi(t) ≤ μj(t), ν0(t) := ℒ(t), μ0(t) := ℛ(t),
Moreover, there exist continuous limits ν(t) = limi→∞ νi(t), μ(t) = limj→∞ μj(t), ν(t) ≤ μ(t),
and, for arbitrary indexes i ≥ 0, j ≥ 0,
Example 5
Consider the existence of left semi-global solutions to the scalar linear equation
which is a particular case of equation (2.29), where τ(t) = 1, σ(t) = 1, c(t) = et, d(t) = e−1(sin t)2. We have r1 = r2 = 1. Let t0 = −2. Then, 𝒥− = (−∞, −2] and
and (3.6) holds. Estimating the right-hand side of (3.7) leads to
and (3.7) holds as well. Similarly, it can be verified that inequalities (3.8), (3.9) hold (because ℒ(t), ℛ(t) are constants). All the hypotheses of Theorem 4 hold and, by inequality (3.10) with i = j = 0, there exists a solution y(t) of equation (3.11) on
4 Semi-Global Solutions in Non-Iterative Case
Carefully tracing the proof of Theorem 1, we can derive a theorem on the existence of semi-global solutions of classes of equations without applying the monotone iterative method. In this case, we will get upper and below estimates of semi-global solutions without the possibility of improving them in an iterative process, that is, without using functions of the type νi(t), μi(t), i = 0, 1, . . . .
Theorem 5
Let us assume that
implies
then there exists a right semi-global solution y :
Proof
The proof can be done along the same lines as the proof of Theorem 1 with the following modification. From the above proof, we delete the parts Monotone iterative sequences and The theorem applied to monotone iterative methods. Since the operator G is compact and the property (4.1) is assumed, by Schauder-Tychonoff fixed-point theorem, there exists a fixed point of G and the relation between G and T defined by (2.11) implies that it is a solution of the equation (2.3).
The following theorem can be proved in much the same way based on Theorem 3.
Theorem 6
Let us assume that
implies
then there exists a left semi-global solution y :
Remark 1
For the case of a linear equation (2.29), Theorems 2 and 4 use simplified hypotheses of Theorems 1 and 3. Also, for such a linear equation, the hypotheses of Theorems 5 and 6 are equivalent with those of Theorems 2 and 4 and so the linear case need not be considered separately.
5 Global Solutions
This section is concerned with the existence of global solutions on the entire ℝ. The general case is treated in section 5.1 using the iterative method, and a particular linear case in section 5.2. This problem without the iterative method applied is discussed in section 5.3.
Assume the existence of bounded continuous functions ℒ, ℛ: ℝ → ℝn which satisfy
By Ω we denote the set of the functions λ ∈ C(ℝ, ℝn) with the property ℒ(t) ≤ λ(t) ≤ ℛ(t), t ∈ ℝ, that is,
Define a mapping
where
Let us look for a solution of equation (1.1) in an exponential form
with suitable
where t ∈ ℝ and T** : C(ℝ, ℝn) → C(ℝ, ℝn).
5.1 Global solutions found by iterative monotone method
With several modifications, the monotone iterative method used in the proof of Theorem 1, can be employed to prove the existence of global solutions as well. This is described by the below theorem.
Theorem 7
Let
For any fixed a, b ∈ ℝ, a < b, there exists a constant K such that, for any function λ ∈ Ω,
for arbitrary t, t′ ∈ [a, b].
ℒ(t) ≤ (T**ℒ)(t), ℛ(t) ≥ (T**ℛ)(t), t ∈ ℝ.
For any λ*, μ* ∈ Ω, the inequality
implies
Then, there exists a global solution y : ℝ → ℝn of (1.1) satisfying y(t*) = k and, for arbitrary indexes i ≥ 0, j ≥ 0,
where νi(t) ≤ νi+1(t), μj+1(t) ≤ μj(t), νi(t) ≤ μj(t), ν0(t) := ℒ(t), μ0(t) := ℛ(t),
Moreover, there exist continuous limits
defining global solutions by the formulas yν(t) = I(k, ν)(t), yμ(t) = I(k, μ)(t), t ∈ ℝ satisfying yν(t*) = yμ(t*) = k and inequalities
where i ≥ 0, j ≥ 0 are arbitrary.
Proof
As mentioned above, the proof is a variant of the proof of Theorem 1 with the following changes. Instead of the space L, the Banach space L = C(ℝ, ℝn) is used of bounded continuous functions from ℝ into ℝn and the closed, normal order cone is defined as
where i = 0, 1, . . . , and t ∈ ℝ, similar to (2.16) are guaranteed to hold by (ii) and (iii). Similarly, with (i), the compactness of T** can be proved. Finally, Theorem 7.A in [33, p. 283] on monotone iterative methods can be applied to confirm the existence of limit functions (5.8) with the desired properties.
Example 6
Let n = 1, t* ∈ ℝ and k = 1 be fixed. We will use Theorem 7 to prove the existence of a positive global solution to the linear equation
where t ∈ ℝ, r1 = r2 = ε and ε is a fixed constant satisfying 0 < ε ≤ 0.5 ln 2. The operator equation (5.4) takes the form
Set ℒ(t) := −2, ℛ(t) := 2. Then, Ω := {λ ∈ C(ℝ, ℝn) : − 2 ≤ λ(t) ≤ 2}. Condition (i) obviously holds. Let us show that condition (ii) holds as well. We get
Similarly, condition (iii) can be verified. Therefore, a global solution y(t) of (5.9) exists, y(t*) = 1 and, from (5.5), (5.6) where i = j = 0, we get
Figure 5 visualizes for k = 1 and t* = 0 the behaviour of “starting” functions (a subsolution and a supersolution) ν0 = ℒ, μ0 = ℛ, their images (by operator T**) ν1, μ1, and possible limits ν, μ. Figure 6 shows the behaviour (numerically computed) of I**(1, 0, ν0)(t), I**(1, 0, ν1)(t), I**(1, 0, μ0)(t), I**(1, 0, μ1)(t), and possible solutions yν(t), yμ(t). It can be seen that, in the case considered, the function I**(1, 0, μ1)(t), for t ≥ 0, substantially improves the estimates of solutions given by I**(1, 0, μ0)(t) and the function I**(1, 0, ν1)(t), for t ≤ 0, substantially improves the estimates of solutions given by I**(1, 0, ν0)(t).

To Example 6.

To Example 6.
5.2 Global solutions found by iterative monotone method a linear case
Consider a linear equation (2.29) if 𝒥 = ℝ and assume that the functions c, d : ℝ → [0, ∞), τ : ℝ → [0, r1] and σ : ℝ → [0, r2] are Lipschitz continuous. Therefore, the result below is a linear variant of Theorem 7.
Theorem 8
Let there exist bounded continuous functions ℒ, ℛ: ℝ → ℝ satisfying (5.1) and inequalities
on ℝ. Then, for any given t* ∈ ℝ, there exists a global solution y = y*(t) of (2.29) on ℝ such that y*(t*) = 1 and, for arbitrary indices i ≥ 0, j ≥ 0,
where νi(t) ≤ νi+1(t), μj+1(t) ≤ μj(t), νi(t) ≤ μj(t), ν0(t) := ℒ(t), μ0(t) := ℛ(t), t ∈ ℝ, and, for i > 0, j > 0,
Moreover, there exist continuous limits ν(t) = limi→∞ νi(t), μ(t) = limj→∞ μj(t), ν(t) ≤ μ(t), t ∈ ℝ, defining global solutions yν, yμ : ℝ → ℝn of (2.29) such that yν(t*) = yμ(t*) = k, by the formulas
and, for arbitrary i ≥ 0, j ≥ 0,
Proof
The theorem is a consequence of Theorem 7 applied to equation (2.29). Condition (i) holds because of the Lipschitz continuity of c, d, τ and σ. Condition (ii) reduces to (5.11), (5.12). Condition (iii) holds due to non-negativity of c and d. Inequalities (5.13), (5.14) are consequences of (5.5), (5.6).
Remark 2
Theorem 8 is applicable to autonomous equation (2.42) considered in Section 2.2. Therefore, based on the computations performed there, we state that, by formulas (5.13), (5.14), for every t* ∈ ℝ, there exists a global solution y = y(t) to (2.42) such that y(t*) = 1,
and νi, μj can be computed by the same iterative process with several first values displayed in the Table 1.
Example 7
Let us apply Theorem 8 to the equation (a particular case of equation (2.29))
where τ(t) = σ(t) = 1, c(t) = 1.01 exp(−1 − 0.001(sin t)2) and d(t) = 1.1e−1. Let ℒ(t) = 0.1 and ℛ(t) = 0.2. Estimating the right-hand side of (5.11), we derive
and (5.11) holds. Similarly, estimating the right-hand side of (5.12), we arrive at
and (5.12) holds. Therefore, the equation (5.15) has, for any given t* ∈ ℝ, a global solution y = y*(t) such that y*(t*) = 1 and, by (5.13), (5.14) with i = j = 0,
Note that equation (5.15) where the “small” term −0.001(sin t)2 is omitted has a solution y(t) = eλ(t−t*) where λ solves the equation λe = −1.01e−λ + 1.1eλ. One of the real roots equals (by WolframAlpha software) λ =. 0.151683. This is in accordance with (5.16).
Remark 3
It is well-known (we refer, e.g., to [1, Corollary 2.5] or [18, Theorem 3.3.1]) that the equation ẏ(t) = −c(t)y(t − τ(t)), which is equation (2.29) with d ≡ 0, has a positive solution on an interval 𝒥+ if
Similarly (we refer, e.g., to [1, Corollary 5.1] or [14, Theorem 3.2]), equation ẏ(t) = d(t)y(t + σ(t)), which is equation (2.29) with c ≡ 0, has a positive solution on an interval
In Example 7, we proved that there exists a positive solution to equation (5.15) in spite of the fact that the particular criteria (5.17), (5.18) (being sharp in many cases) are not fulfilled for this equation restricted to an interval
and
Example 8
To illustrate a type (2.29) linear equation, rather than using a new example, we rewrite equation (5.9) previously considered in Example 6 in the form of equation (2.29). It is easy to see that such an equation can be written as
where c(t) := (| sin t| − sin t)/2, d(t) := (| sin t| + sin t)/2 and
Putting ℒ(t) := −2 and ℛ(t) := 2, we can verify (as in Example 6) that inequalities (5.11), (5.12) hold and that there exists a global solution to (5.19) satisfying (5.10).
5.3 Global solutions in a non-iterative case
Below we formulate a theorem on the existence of global solutions if hypothesis (iii) in Theorem 7 is replaced by a weaker one. While by this approach, the existence of a global solution can be proved for a rather wide class of equations, we lose the iterative process converging to such a global solution. Since the proof can be made in much the same way as that of Theorem 7 with some changes mentioned in the proof of Theorem 5, we omit it. In addition, we do not formulate a linear analogy for equation (2.29) for much the same reason as the one explained in Remark 1.
Theorem 9
Let
then there exists a global solution y : ℝ → ℝn of (1.1) satisfying y(t*) = k and
Example 9
Let n = 1, t* = 0 and k = 1 be fixed. We will use Theorem 9 to prove the existence of a positive global solution to a scalar equation
The operator equation (5.4), λ(t) = (T** λ)(t), t ∈ ℝ, takes the form
where
Hypothesis (i) obviously holds and so does hypothesis (ii) because, from (5.24), we derive
By the above computations, we can easily verify that condition (5.20) holds as well. We conclude that a global solution y(t) of (5.23) exists, y(0) = 1 and
Let us note that, if the term 0.01 sin y(t) is omitted in equation (5.23), then there exists a global solution y(t) = ept where, by WolframAlpha software, p ≐ −0.618447. This is in accordance with (5.25).
Example 10
Let n = 2. Consider a non-linear system as a particular case of (1.1),
We have r1 = r2 = 1. Let k1 = k2 = 1 and t* = 0. Then, by (5.2) and (5.3)
Operator equation (5.4) is equivalent with the system (to simplify the notation, we do not replace below all yi(t), i = 1, 2 having in mind equation (5.28))
Let ℒi(t) = 0, ℛi(t) = 1, i = 1, 2. Hypothesis (i) of Theorem 9 is obviously fulfilled. Let us show that hypothesis (ii) holds as well. Inequality ℒ(t) ≤ (T**ℒ)(t) holds because (5.29) results in 0 ≤ 0.5(sin(y2(t)))2 while (5.30) in 0 ≤ 0.5(cos(y1(t)))2, t ∈ ℝ. Inequality ℝ(t) ≥ (T**ℛ)(t) holds as well, as implied by the below estimates
Condition (5.20) is fulfilled because, for an arbitrary λ(t) = (λ1(t), λ2(t)) such that
as suggested by (5.29), (5.30),
Therefore, by Theorem 9, there exists a global solution y = (y1, y2) of (5.26), (5.27) on ℝ, such that yi(0) = 1, i = 1, 2 and
Let us note that, if the terms (sin y2(t))2, (cos y1(t))2 are replaced by the number 1 in (5.26), (5.27), then there exists a global solution yi(t) = ept, i = 1, 2 where, by WolframAlpha software, p ≐ 0.74085. This is in accordance with (5.31).
6 Concluding Remarks and Open Problems
The paper is concerned with right and left semi-global solutions and global solutions to nonlinear mixed type functional differential equations giving existence criteria for each type. The main results are formulated by Theorems 1, 3, 7 and 9. Quite natural questions arise. One of them is, for example, if the statement of Theorem 7 (on existence of a global solution) can be derived by regarding its conclusion as the “union” of the conclusions of Theorems 1 (on existence of a right semi-global solution) and 3 (on existence of a left semi-global solution) or, vice versa, by splitting its conclusion into those of Theorems 1 and 3. Trying to find out whether the conclusions of Theorems 1 and 3, in a sense, imply the one of Theorem 7, we conclude that the hypotheses of Theorems 1, 3 differ from those of Theorem 7. Hypothesis (iv) of Theorem 1 does not imply (iii) in Theorem 7 because the operator T used in Theorem 1 produces functions defined on 𝒥+ but not on
the following objections against such a simple direct restriction can be raised. If there exists such a global solution, then the above restrictions are probably (in most practical situations) not needed. Moreover, such restrictions have been derived from the “global” assumptions formulated in Theorem 7 (that is its hypotheses must be fulfilled on the entire ℝ) in spite of the fact that “semi-global” Theorems 1 and 3 use only assumptions related to semi-global intervals
Obviously, it is possible to consider also two particular cases of equation (1.1) if either the delayed or the advanced terms are missing. In the first case, the function f (t, yt, yt) reduces to an advance-type function fa(t, yt ) so equation (1.1) reduces to
In the second case, the function f (t, yt, yt) reduces to a delayed-type function fd(t, yt) and equation (1.1) reduces to
Since, as mentioned above, systems (6.1), (6.2) are particular cases of (1.1), we can get results for these systems as restrictions of the results derived. To investigate the system (6.1), only the space Cr2 without Cr1 needs to be considered. For the system (6.2) this is true vice versa. Therefore, such results can be obtained from the general results for (1.1) if we by formally setting either r1 = 0 in the case of system (6.1), or r2 = 0 in the case of system (6.2).
In formulating nonlinear statements,
The results based on the iterative monotone method admit that, in a domain, more than one solution may exist of a given type (we refer to the solutions yν(t) and yμ(t)). When constructing our examples, we expected only one solution of a given type (that is yν(t) = yμ(t)) desiring to get as much precise information about the expected solution as possible. It is of course not difficult to find examples with yν(t) ≢ yμ(t) on the intervals in question.
In the recent paper [13] the authors consider global solutions of nonlinear systems of mixed-type. To prove the existence of global solutions, a different approach and substantially different operators are constructed than those used in the paper. Comparing the results, one sees that these are applicable to different classes of equations. Moreover, in [13] no iterative method is suggested.
Papers [8, 10] co-authored by the first author deal with global solutions of functional differential equations of delayed type only.
Dealing with a topic very close to our investigations, article [28] is concerned with the asymptotic behaviour of solutions to scalar linear mixed-type equations. Using the terminology of the present paper, it considers the right semi-global solutions. The existence of non-negative solutions, non-oscillating solutions, and convergence of solutions to zero is considered by applying a technique of fixed points developed in [4].
Many books and papers deal with the existence of positive solutions (let us refer, for example, to [1, 3, 9, 23]). As suggested by inequalities (2.8), (2.34), (3.4), (3.10), (5.5), (5.6), (5.13), (5.14) and (5.21), (5.22), our results produce sufficient conditions for the existence of solutions with positive co-ordinates and, unlike the books and papers mentioned above, derive two-sided inequalities for co-ordinates of these solutions. Let us note that, in the linear case when right semi-global solutions are considered, inequality (2.31) is similar to inequality (5.5.3) in [1].
Based on the investigations made, we formulate some open problems which might stimulate a continuation of the present research.
Open problem 1. Some classes of delayed or advanced scalar linear differential equations have two sets of asymptotically different (global or semi-global) positive solutions. For example, advanced equation ẍ(t) = e−1 x(t + 1) has, for t → ±∞, two asymptotically different positive solutions
In Theorems 1–4 a function φ is used. One of the meanings of this function is explained in Example 3. An open problem arises if there exist two different functions φ = φi, i = 1, 2 “generating”, for some classes of equations, asymptotically different solutions such as those mentioned above. In a more general setting, this problem may be phrased as follows. Is it possible to find two sets of functions Φi, i = 1, 2 such that solutions xφ1, xφ2 with φ1 ∈ Φ1, φ2 ∈ Φ2 will be asymptotically different?
With respect to this problem we refer to [25] and as well to [9, 11, 12] where asymptotically different solutions are discussed for delayed functional differential equations.
The following open problem points to possible modifications of our approach.
Open problem 2. While we discussed the above relationship among Theorems 1, 3 and 7, the following remark was left aside. Is it possible to modify operator T in Theorem 1 by setting t0 = −∞ or operator T* in Theorem 3 by setting t0 = +∞ provided that the relevant integrals converge in the components of mapping I or mapping I*? Is it possible to modify operator T** in Theorem 7 by setting t* = ±∞ provided that the relevant integrals converge in the components of mapping I** ?
The paper [6] considers a non-linear problem arising in nerve conduction theory
where t ∈ ℝ, τ > 0 is fixed and f : [0, 1] → ℝ (we refer to [5, 7, 19, 20, 21, 25] as well). A solution is assumed to be a monotone increasing function v(t), 0 < v(t) < 1. Although the problem (6.3) concerns the existence of global solutions, in [6] this problem is solved numerically on intervals [−L, L] with L > 0 and, for |t| > L, some asymptotic expansions are proposed. The existence of a global solution is assumed (no proof of its existence is given in the paper). It seems that our results do not give an answer either as to the existence of the global solution to (6.3). The main reason is that the operator (T** λ)(t), constructed by formula (5.4), does not satisfy condition (iii) in Theorem 7. Theorem 4 in [13] is not applicable either because it is not clear how to define the function γ in this theorem. The last open problem points to other modifications of our approach.
Open problem 3. Is it possible to modify the approach used in Section 5 (Global Solutions) for the results to be applicable to problem (6.3)? Can the desired goal be achieved by a suitable modification of the definition of the set Ω by adding some further expected properties of the functions λ?
Acknowledgment
This research has been partially supported by the projects of specific university research at Brno University of Technology FAST-S-20-6294 and FEKT-S-20-6225. The authors would like to express their sincere gratitude to the editor and referees for their comments, which have improved the present paper in many aspects.
Conflict of interest statement:
Authors state no conflict of interest.
References
[1] R. P. Agarwal, L. Berezansky, E. Braverman and A. Domoshnitsky, Nonoscillation Theory of Functional Differential Equations with Applications, Springer, 2012.10.1007/978-1-4614-3455-9Suche in Google Scholar
[2] H. d’Albis and E. Augeraud-Véron, Competitive growth in a lifecycle model: Existence and dynamics, Internat. Econom. Rev. 50 (2009), no. 2, 459–484.10.1111/j.1468-2354.2009.00537.xSuche in Google Scholar
[3] L. Berezansky, E. Braverman and S. Pinelas, On nonoscillation of mixed advanced-delay differential equations with positive and negative coefficients, Comput. Math. Appl. 58 (2009), no. 4, 766–775.10.1016/j.camwa.2009.04.010Suche in Google Scholar
[4] T. A. Burton and T. Furumochi, Fixed points and problems in stability theory for ordinary and functional differential equations, Dynam. Systems Appl. 10 (2001), no. 1, 89–116.Suche in Google Scholar
[5] X. Chen, J. Guo and Ch. Wu, Traveling waves in discrete periodic media for bistable dynamics, Arch. Ration. Mech. Anal 189 (2008), no. 2, 189–236.10.1007/s00205-007-0103-3Suche in Google Scholar
[6] H. Chi, J. Bell and B. Hassard, Numerical solution of a nonlinear advance-delay-differential equation from nerve conduction theory, J. Math. Biol. 24 (1986), no. 5, 583–601.10.1007/BF00275686Suche in Google Scholar PubMed
[7] S. N. Chow, J. Mallet-Paret and W. Shen, Traveling waves in lattice dynamical systems, J. Differ. Equ. 149 (1998), no. 2, 248–291.10.1006/jdeq.1998.3478Suche in Google Scholar
[8] J. Diblík and N. Koksch, Existence of global solutions of delayed differential equations via retract approach, Nonlinear Anal. 64 (2006), no. 6, 1153–1170.10.1016/j.na.2005.06.030Suche in Google Scholar
[9] J. Diblík and N. Koksch, Positive solutions of the equation ẍ(t) = −c(t)x(t − τ) in the critical case, J. Math. Anal. Appl. 250(2000), no. 2, 635–659.10.1006/jmaa.2000.7008Suche in Google Scholar
[10] J. Diblík and N. Koksch, Sufficient conditions for the existence of global solutions of delayed differential equations, J. Math. Anal. Appl. 318 (2006), no. 2, 611–625.10.1016/j.jmaa.2005.06.020Suche in Google Scholar
[11] J. Diblík and M. Kúdelčíková, Two classes of asymptotically different positive solutions of the equation ẏ(t) = −f (t, y(t)), Nonlinear Anal. 70 (2009), 3702–3714.10.1016/j.na.2008.07.026Suche in Google Scholar
[12] J. Diblík and M. Kúdelčíková, Two classes of positive solutions of first order functional differential equations of delayed type, Nonlinear Anal. 75 (2012), 4807–4820.10.1016/j.na.2012.03.030Suche in Google Scholar
[13] J. Diblík and G. Vážanová, Existence of global solutions to nonlinear mixed-type functional differential equations, Nonlinear Anal. 195 (2020), 111731, 22 pp.10.1016/j.na.2019.111731Suche in Google Scholar
[14] J. G. Dix, Sufficient conditions for the existence of non-oscillatory solutions to first-order differential equations with multiple advanced arguments, Electron. J. Differential Equations 2018, paper no. 177, pp. 1–9, https://ejde.math.txstate.edu/Volumes/2018/177/dix.pdf.Suche in Google Scholar
[15] R. D. Driver, Ordinary and Delay Differential Equations, Springer-Verlag, 1977.10.1007/978-1-4684-9467-9Suche in Google Scholar
[16] N. J. Ford and P. M. Lumb, Mixed-type functional differential equations: A numerical approach, J. Comput. Appl. Math. 229(2009), no. 2, 471–479.10.1016/j.cam.2008.04.016Suche in Google Scholar
[17] M. Galewski, Basic Monotonicity Methods with Some Applications, Compact Textbooks in Mathematics, Birkhäuser, Springer Nature, 2021.10.1007/978-3-030-75308-5Suche in Google Scholar
[18] I. Györi and G. Ladas, Oscillation Theory of Delay Differential Equations, Clarendon Press, 1991.10.1093/oso/9780198535829.001.0001Suche in Google Scholar
[19] S. I. Iakovlev and V. Iakovleva, Eigenvalue-eigenfunction problem for Steklov’s smoothing operator and differential-difference equations of mixed type, Opuscula Math. 33 (2013), no. 1, 81–98, http://dx.doi.org/10.7494/OpMath.2013.33.1.81.10.7494/OpMath.2013.33.1.81Suche in Google Scholar
[20] S. I. Iakovlev and V. Iakovleva, Systems of advance-delay differential-difference equations and transformation groups, Electron. J. Differential Equations, 2016 no. 311, 1–16, https://ejde.math.txstate.edu/Volumes/2016/311/iakovlev.pdf.Suche in Google Scholar
[21] V. Iakovleva and J. Vanegas, Smooth solution of an initial value problem for a mixed-type differential difference equation, Current trends in analysis and its applications, Trends Math., Birkhäuser/Springer, Cham, 2015, 649–653.10.1007/978-3-319-12577-0_70Suche in Google Scholar
[22] A. Kaddar and H. Talibi Alaoui, Fluctuations in a mixed IS-LM business cycle model, Electron. J. Differential Equations 2008, no. 134, 1–9.Suche in Google Scholar
[23] T. Krisztin, Nonoscillation for functional differential equations of mixed type, J. Math. Anal. Appl. 245 (2000), no. 2, 326–345.10.1006/jmaa.2000.6735Suche in Google Scholar
[24] T. Kusano, On even-order functional differential equations with advanced and retarded arguments, J. Differential Equations 45 (1982), no. 1, 75–84.10.1016/0022-0396(82)90055-9Suche in Google Scholar
[25] J. Mallet-Paret and S. Verduyn Lunel, Exponential Dichotomies and Wiener-Hopf Factorizations for Mixed-Type Functional Differential Equations, 2001, http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.23.8226Suche in Google Scholar
[26] D. Otrocol, Systems of functional differential equations with maxima, of mixed type, Electron. J. Qual. Theory Differ. Equ. 2014 (2014), no. 5, 1–9.10.14232/ejqtde.2014.1.5Suche in Google Scholar
[27] N. S. Papageorgiou, V. D. Rădulescu, D. D. Repovš, Nonlinear Analysis-Theory and Methods., Springer Monographs in Mathematics. Springer, Cham 2019.10.1007/978-3-030-03430-6Suche in Google Scholar
[28] S. Pinelas, Asymptotic behavior of solutions to mixed type differential equations, Electron. J. Differ. Eq. 2014 (2014), no. 210, 1–9.10.1186/1687-1847-2014-327Suche in Google Scholar
[29] M. Pituk and G. Röst, Large time behavior of a linear delay differential equation with asymptotically small coefficient, Bound. Value Probl. 2014 2014:114, 1–9.10.1186/1687-2770-2014-114Suche in Google Scholar
[30] L. S. Pontryagin, V. G. Boltyanskij, R. V. Gamkrelidze and E. F. Mishchenko, The Mathematical Theory of Optimal Processes, Wiley-Interscience, 1962.Suche in Google Scholar
[31] V. D. Rădulescu, Qualitative Analysis of Nonlinear Elliptic Partial Differential Equations: Monotonicity, Analytic, and Variational Methods, Contemporary Mathematics and Its Applications, 6. Hindawi Publishing Corporation, New York, 2008.10.1155/9789774540394Suche in Google Scholar
[32] A. Rustichini, Hopf bifurcation for functional differential equations of mixed type, J. Dynam. Differential Equations 1(1989), no. 2, 145–177.10.1007/BF01047829Suche in Google Scholar
[33] E. Zeidler, Nonlinear functional analysis and its applications. I. Fixed-point theorems., Springer 1986. (Translated from the German by P. Wadsack.)10.1007/978-1-4612-4838-5_18Suche in Google Scholar
© 2021 J. Diblík et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Regular Articles
- Sharp conditions on global existence and blow-up in a degenerate two-species and cross-attraction system
- Positive solutions for (p, q)-equations with convection and a sign-changing reaction
- Blow-up solutions with minimal mass for nonlinear Schrödinger equation with variable potential
- Variation inequalities for rough singular integrals and their commutators on Morrey spaces and Besov spaces
- Ground state solutions to a class of critical Schrödinger problem
- Lane-Emden equations perturbed by nonhomogeneous potential in the super critical case
- Groundstates for Choquard type equations with weighted potentials and Hardy–Littlewood–Sobolev lower critical exponent
- Shape and topology optimization involving the eigenvalues of an elastic structure: A multi-phase-field approach
- On the existence of multiple solutions for a partial discrete Dirichlet boundary value problem with mean curvature operator
- Existence and uniqueness of periodic orbits in a discrete model on Wolbachia infection frequency
- Distortion inequality for a Markov operator generated by a randomly perturbed family of Markov Maps in ℝd
- Existence and concentration of positive solutions for a critical p&q equation
- Approximate nonradial solutions for the Lane-Emden problem in the ball
- A variant of Clark’s theorem and its applications for nonsmooth functionals without the global symmetric condition
- Existence results for double phase problems depending on Robin and Steklov eigenvalues for the p-Laplacian
- Refined second boundary behavior of the unique strictly convex solution to a singular Monge-Ampère equation
- Multiplicity of positive solutions for a degenerate nonlocal problem with p-Laplacian
- Nonuniform dichotomy spectrum and reducibility for nonautonomous difference equations
- Qualitative analysis for the nonlinear fractional Hartree type system with nonlocal interaction
- Existence of single peak solutions for a nonlinear Schrödinger system with coupled quadratic nonlinearity
- Compact Sobolev-Slobodeckij embeddings and positive solutions to fractional Laplacian equations
- On the uniqueness for weak solutions of steady double-phase fluids
- New asymptotically quadratic conditions for Hamiltonian elliptic systems
- Critical nonlocal Schrödinger-Poisson system on the Heisenberg group
- Anomalous pseudo-parabolic Kirchhoff-type dynamical model
- Weighted W1, p (·)-Regularity for Degenerate Elliptic Equations in Reifenberg Domains
- On well-posedness of semilinear Rayleigh-Stokes problem with fractional derivative on ℝN
- Multiple positive solutions for a class of Kirchhoff type equations with indefinite nonlinearities
- Sobolev regularity solutions for a class of singular quasilinear ODEs
- Existence of multiple nontrivial solutions of the nonlinear Schrödinger-Korteweg-de Vries type system
- Maximum principle for higher order operators in general domains
- Butterfly support for off diagonal coefficients and boundedness of solutions to quasilinear elliptic systems
- Bifurcation analysis for a modified quasilinear equation with negative exponent
- On non-resistive limit of 1D MHD equations with no vacuum at infinity
- Absolute Stability of Neutral Systems with Lurie Type Nonlinearity
- Singular quasilinear convective elliptic systems in ℝN
- Lower and upper estimates of semi-global and global solutions to mixed-type functional differential equations
- Entire solutions of certain fourth order elliptic problems and related inequalities
- Optimal decay rate for higher–order derivatives of solution to the 3D compressible quantum magnetohydrodynamic model
-
Application of Capacities to Space-Time Fractional Dissipative Equations II: Carleson Measure Characterization for
- Centered Hardy-Littlewood maximal function on product manifolds
- Infinitely many radial and non-radial sign-changing solutions for Schrödinger equations
- Continuous flows driving branching processes and their nonlinear evolution equations
- Vortex formation for a non-local interaction model with Newtonian repulsion and superlinear mobility
- Thresholds for the existence of solutions to inhomogeneous elliptic equations with general exponential nonlinearity
- Global attractors of the degenerate fractional Kirchhoff wave equation with structural damping or strong damping
- Multiple nodal solutions of the Kirchhoff-type problem with a cubic term
- Properties of generalized degenerate parabolic systems
- Infinitely many non-radial solutions for a Choquard equation
- On the singularly perturbation fractional Kirchhoff equations: Critical case
- On the nonlinear perturbations of self-adjoint operators
- Standing waves to upper critical Choquard equation with a local perturbation: Multiplicity, qualitative properties and stability
- On a comparison theorem for parabolic equations with nonlinear boundary conditions
- Lipschitz estimates for partial trace operators with extremal Hessian eigenvalues
- Positive solutions for a nonhomogeneous Schrödinger-Poisson system
- Brake orbits for Hamiltonian systems of the classical type via geodesics in singular Finsler metrics
- Constrained optimization problems governed by PDE models of grain boundary motions
- A class of hyperbolic variational–hemivariational inequalities without damping terms
- Regularity estimates for fractional orthotropic p-Laplacians of mixed order
- Solutions for nonhomogeneous fractional (p, q)-Laplacian systems with critical nonlinearities
- Nontrivial solutions of discrete Kirchhoff-type problems via Morse theory
- Analysis of positive solutions to one-dimensional generalized double phase problems
- A regularized gradient flow for the p-elastic energy
- On the planar Kirchhoff-type problem involving supercritical exponential growth
- Spectral discretization of the time-dependent Navier-Stokes problem with mixed boundary conditions
- Nondiffusive variational problems with distributional and weak gradient constraints
- Global gradient estimates for Dirichlet problems of elliptic operators with a BMO antisymmetric part
- The existence and multiplicity of the normalized solutions for fractional Schrödinger equations involving Sobolev critical exponent in the L2-subcritical and L2-supercritical cases
- Existence and concentration of ground-states for fractional Choquard equation with indefinite potential
- Well-posedness and blow-up results for a class of nonlinear fractional Rayleigh-Stokes problem
- Asymptotic proximity to higher order nonlinear differential equations
- Bounded solutions to systems of fractional discrete equations
- On the solutions to p-Poisson equation with Robin boundary conditions when p goes to +∞
Artikel in diesem Heft
- Regular Articles
- Sharp conditions on global existence and blow-up in a degenerate two-species and cross-attraction system
- Positive solutions for (p, q)-equations with convection and a sign-changing reaction
- Blow-up solutions with minimal mass for nonlinear Schrödinger equation with variable potential
- Variation inequalities for rough singular integrals and their commutators on Morrey spaces and Besov spaces
- Ground state solutions to a class of critical Schrödinger problem
- Lane-Emden equations perturbed by nonhomogeneous potential in the super critical case
- Groundstates for Choquard type equations with weighted potentials and Hardy–Littlewood–Sobolev lower critical exponent
- Shape and topology optimization involving the eigenvalues of an elastic structure: A multi-phase-field approach
- On the existence of multiple solutions for a partial discrete Dirichlet boundary value problem with mean curvature operator
- Existence and uniqueness of periodic orbits in a discrete model on Wolbachia infection frequency
- Distortion inequality for a Markov operator generated by a randomly perturbed family of Markov Maps in ℝd
- Existence and concentration of positive solutions for a critical p&q equation
- Approximate nonradial solutions for the Lane-Emden problem in the ball
- A variant of Clark’s theorem and its applications for nonsmooth functionals without the global symmetric condition
- Existence results for double phase problems depending on Robin and Steklov eigenvalues for the p-Laplacian
- Refined second boundary behavior of the unique strictly convex solution to a singular Monge-Ampère equation
- Multiplicity of positive solutions for a degenerate nonlocal problem with p-Laplacian
- Nonuniform dichotomy spectrum and reducibility for nonautonomous difference equations
- Qualitative analysis for the nonlinear fractional Hartree type system with nonlocal interaction
- Existence of single peak solutions for a nonlinear Schrödinger system with coupled quadratic nonlinearity
- Compact Sobolev-Slobodeckij embeddings and positive solutions to fractional Laplacian equations
- On the uniqueness for weak solutions of steady double-phase fluids
- New asymptotically quadratic conditions for Hamiltonian elliptic systems
- Critical nonlocal Schrödinger-Poisson system on the Heisenberg group
- Anomalous pseudo-parabolic Kirchhoff-type dynamical model
- Weighted W1, p (·)-Regularity for Degenerate Elliptic Equations in Reifenberg Domains
- On well-posedness of semilinear Rayleigh-Stokes problem with fractional derivative on ℝN
- Multiple positive solutions for a class of Kirchhoff type equations with indefinite nonlinearities
- Sobolev regularity solutions for a class of singular quasilinear ODEs
- Existence of multiple nontrivial solutions of the nonlinear Schrödinger-Korteweg-de Vries type system
- Maximum principle for higher order operators in general domains
- Butterfly support for off diagonal coefficients and boundedness of solutions to quasilinear elliptic systems
- Bifurcation analysis for a modified quasilinear equation with negative exponent
- On non-resistive limit of 1D MHD equations with no vacuum at infinity
- Absolute Stability of Neutral Systems with Lurie Type Nonlinearity
- Singular quasilinear convective elliptic systems in ℝN
- Lower and upper estimates of semi-global and global solutions to mixed-type functional differential equations
- Entire solutions of certain fourth order elliptic problems and related inequalities
- Optimal decay rate for higher–order derivatives of solution to the 3D compressible quantum magnetohydrodynamic model
-
Application of Capacities to Space-Time Fractional Dissipative Equations II: Carleson Measure Characterization for
- Centered Hardy-Littlewood maximal function on product manifolds
- Infinitely many radial and non-radial sign-changing solutions for Schrödinger equations
- Continuous flows driving branching processes and their nonlinear evolution equations
- Vortex formation for a non-local interaction model with Newtonian repulsion and superlinear mobility
- Thresholds for the existence of solutions to inhomogeneous elliptic equations with general exponential nonlinearity
- Global attractors of the degenerate fractional Kirchhoff wave equation with structural damping or strong damping
- Multiple nodal solutions of the Kirchhoff-type problem with a cubic term
- Properties of generalized degenerate parabolic systems
- Infinitely many non-radial solutions for a Choquard equation
- On the singularly perturbation fractional Kirchhoff equations: Critical case
- On the nonlinear perturbations of self-adjoint operators
- Standing waves to upper critical Choquard equation with a local perturbation: Multiplicity, qualitative properties and stability
- On a comparison theorem for parabolic equations with nonlinear boundary conditions
- Lipschitz estimates for partial trace operators with extremal Hessian eigenvalues
- Positive solutions for a nonhomogeneous Schrödinger-Poisson system
- Brake orbits for Hamiltonian systems of the classical type via geodesics in singular Finsler metrics
- Constrained optimization problems governed by PDE models of grain boundary motions
- A class of hyperbolic variational–hemivariational inequalities without damping terms
- Regularity estimates for fractional orthotropic p-Laplacians of mixed order
- Solutions for nonhomogeneous fractional (p, q)-Laplacian systems with critical nonlinearities
- Nontrivial solutions of discrete Kirchhoff-type problems via Morse theory
- Analysis of positive solutions to one-dimensional generalized double phase problems
- A regularized gradient flow for the p-elastic energy
- On the planar Kirchhoff-type problem involving supercritical exponential growth
- Spectral discretization of the time-dependent Navier-Stokes problem with mixed boundary conditions
- Nondiffusive variational problems with distributional and weak gradient constraints
- Global gradient estimates for Dirichlet problems of elliptic operators with a BMO antisymmetric part
- The existence and multiplicity of the normalized solutions for fractional Schrödinger equations involving Sobolev critical exponent in the L2-subcritical and L2-supercritical cases
- Existence and concentration of ground-states for fractional Choquard equation with indefinite potential
- Well-posedness and blow-up results for a class of nonlinear fractional Rayleigh-Stokes problem
- Asymptotic proximity to higher order nonlinear differential equations
- Bounded solutions to systems of fractional discrete equations
- On the solutions to p-Poisson equation with Robin boundary conditions when p goes to +∞