
(In)dependence of the axioms of Λ-trees
-
Raphael Appenzeller


Abstract
A
1 Introduction
Let
If two segments
If two segments
It is known that for
Theorem 1.1
Let
For every positive
Every
For
When
Proposition 1.2
Let
We show further that for many ordered abelian groups
Theorem 1.3
Let
Theorem 1.3 does not cover all the cases: the group
(Question 1, Question 2)
Let
Let
In applications, the algebraic condition
Formalization in the proof assistant
Relation to
Structure of this article. In Section 2, we state the definitions and some elementary results in the theory of
2 Definitions and elementary results
We define the notion of a
that is positive definite, symmetric, and satisfies the triangle inequality is called a
for
A
If two segments
If two segments
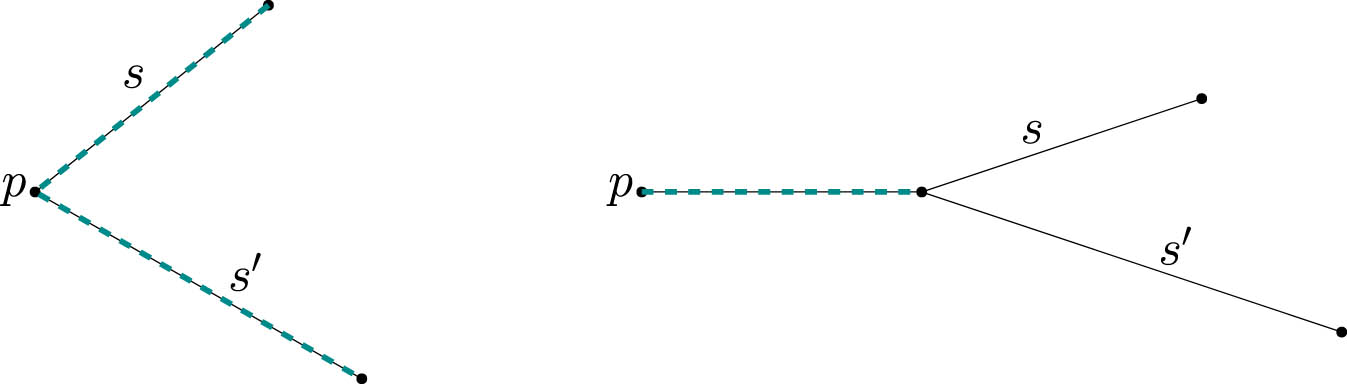
Illustration of axiom (2) (left) and axiom (3) (right) of
In the presence of either axiom (2) or axiom (3), geodesic
Lemma 2.1
(Lemma I.3.6 in [8]) Let
Proposition 2.2
Let
Proof
Let us assume that axiom (3) is satisfied and let
The idea for the following lemma appears also in Chiswell’s proof of Lemma 2.1. We will use this lemma in the proof of Theorem 1.1. The situation is illustrated in Figure 2.
![Figure 2
Lemma 2.3 states that the segment
[
z
,
p
]
\left[z,p]
cannot intersect both
[
x
,
z
]
\left[x,z]
and
[
y
,
z
]
[y,z]
outside of
{
z
}
\left\{z\right\}
. It is also possible that
[
z
,
p
]
\left[z,p]
intersects
[
x
,
y
]
\left[x,y]
in only one point
z
z
, in which case both possibilities in the lemma are correct.](/document/doi/10.1515/agms-2023-0106/asset/graphic/j_agms-2023-0106_fig_002.jpg)
Lemma 2.3 states that the segment
Lemma 2.3
Let
Proof
For
There are
3 Dependence results
Recall that
Theorem 3.1
Let
For every positive
Every
Proof
We will show (a) implies (b). So let
By Lemma 2.1,
of the segments
We consider the subset
and hence,
We can now define the points
Our goal is to show that
Case (1a):
In this case, we have by axiom (2) that
Case (1b):
In this case, we have by axiom (2) that
Case (2a):
This case is similar to (1b). We have by axiom (2) that
Case (2b):
In this case,
In all cases, we have established that
from which we conclude that
![Figure 3
Given the segments
s
=
[
x
,
y
]
,
s
′
=
[
x
,
z
]
⊆
X
s=\left[x,y],s^{\prime} =\left[x,z]\subseteq X
, we can construct points
z
˜
,
p
,
y
′
\tilde{z},p,y^{\prime}
, and
z
′
z^{\prime}
with
d
(
y
,
y
′
)
=
d
(
z
˜
,
z
′
)
=
d
(
z
˜
,
p
)
=
ℓ
d(y,y^{\prime} )=d\left(\tilde{z},z^{\prime} )=d\left(\tilde{z},p)=\ell
. The idea of the proof is to show that
p
=
y
′
=
z
′
p=y^{\prime} =z^{\prime}
and
s
∩
s
′
=
[
x
,
p
]
s\cap s^{\prime} =\left[x,p]
and thus a segment.](/document/doi/10.1515/agms-2023-0106/asset/graphic/j_agms-2023-0106_fig_003.jpg)
Given the segments

We apply Lemma 2.3 to two segments. The two possibilities in the lemma lead to four cases we have to consider.
4 Independence results
In this section, we construct three counterexamples
Proposition 4.1
When condition (a) of Theorem 1.1 does not hold, there is a
When
When
The existence of
4.1 Construction of
X
1
We will construct a
For every positive

When
Lemma 4.2
The set
with the distance function
is a
Proof
Positive definiteness and symmetry follow directly, and the triangle inequality requires a case distinction: if all three points are in
For
holds.□
Lemma 4.3
Let
where
Proof
If
For
We now know that the image of
From Lemma 4.3, we can conclude that
Lemma 4.4
The
Proof
Every segment from
for some
since
which contradicts
which contradicts
Let
Lemma 4.5
The
Proof
Let
We conclude that there is a
Lemma 4.6
The
Proof
Let
We have constructed a
This example shows that axiom (3) forces the branchpoints to be part of the
4.2 Construction of
X
2
It was noted in [1] that for
Let
and endow it with the function

In the
Lemma 4.7
The pair
Proof
Symmetry is clear from the definition and positive definiteness follows from the fact that
and then in the case
Remark 4.8
We note that we could also define this metric on some other subsets of
Lemma 4.9
The
Proof
For the points
defines a segment map whose image
If
If
and the equality
This shows the claim, and we can conclude that
Remark 4.10
We note that the
Lemma 4.11
The
Proof
Let
Lemma 4.12
The
Proof
We consider the segments
4.3 Construction of
X
3
We now give an example for the case
for points
Acknowledgements
The author would like to thank L. De Rosa and X. Flamm for insightful discussions. The author is also grateful for the detailed feedback of an anonymous referee.
-
Conflict of interest: The author states no conflict of interest.
References
[1] R. Alperin and H. Bass, Length functions of group actions on Λ-trees, in: Combinatorial Group Theory and Topology, S. M. Gersten and J. R. Stallings, (Ed.), Annals of Mathematical Studies, vol. 111, Princeton University Press, Princeton, NJ,1987, p. 265–378.10.1515/9781400882083-017Search in Google Scholar
[2] R. Appenzeller, Λ-metric-space - Lean project, 2023, https://github.com/Strichcoder/lambda-metric-space.Search in Google Scholar
[3] C. Bennett. Affine Λ-buildings, Ph.D.-thesis. University of Chicago, 1990.Search in Google Scholar
[4] C. Bennett, Affine Lambda-buildings I, Proc. London Math. Soc. 68 (1994), no. 3, 541–576.10.1112/plms/s3-68.3.541Search in Google Scholar
[5] K. Buzzard, J. Commelin, and P. Massot, Formalising perfectiod spaces, in: Proceedings of the 9th ACM SIGPLAN International Conference on Certified Programs and Proofs, 2020.10.1145/3372885.3373830Search in Google Scholar
[6] C. Bennett, P. Schwer, and K. Struyve, On axiomatic definitions of non-discrete affine buildings, Adv. Geom. 14 (2014), no. 3, 381–412.10.1515/advgeom-2014-0017Search in Google Scholar
[7] G. W. Brumfiel, The tree of a non-Archimedean hyperbolic plane, Contemporary Mathematics, vol. 74, 1988.10.1090/conm/074/957513Search in Google Scholar
[8] I. M. Chiswell, Introduction to Λ-trees, World Scientific Publishing Co. Inc., River Edge, NJ, 2001, ISBN 981-02-4386-3.Search in Google Scholar
[9] L. M. de Moura, S. Kong, J. Avigad, F. van Doorn, J. von Raumer, The Lean Theorem Prover (System Description), Automated Deduction - CADE-25 - 25th International Conference on Automated Deduction, Berlin, Germany, August 1–7, 2015, Proceedings, 2015, p. 378–388.10.1007/978-3-319-21401-6_26Search in Google Scholar
[10] The mathlib Community. The Lean mathematical library, 2019. arXiv:1910.09336.10.1145/3372885.3373824Search in Google Scholar
[11] J. W. Morgan and P. B. Shalen. Valuations, trees, and degenerations of hyperbolic structures. I, Ann. Math. (2) 120 (1984), no. 3, 401–476.10.2307/1971082Search in Google Scholar
[12] A. Parreau, Immeubles affines: construction par les normes, in: Crystallographic Groups and Their Generalizations: Workshop, Katholicke Universiteit Leuven Campus Kortrijk, Belgium, May 26–28, 1999, vol. 262, American Mathematical Soc., 2000, p. 263.10.1090/conm/262/04180Search in Google Scholar
© 2024 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- C1,α-rectifiability in low codimension in Heisenberg groups
- (In)dependence of the axioms of Λ-trees
- Metric quasiconformality and Sobolev regularity in non-Ahlfors regular spaces
- An approach to metric space-valued Sobolev maps via weak* derivatives
- Gromov-Hausdorff limits of closed surfaces
- Curvature exponent and geodesic dimension on Sard-regular Carnot groups
- Qualitative Lipschitz to bi-Lipschitz decomposition
- On the Borel complexity and the complete metrizability of spaces of metrics
- Metric lines in the jet space
- Contractibility of boundaries of cocompact convex sets and embeddings of limit sets
- Lipschitz extension theorems with explicit constants
- Special Issue: Second Order Subelliptic PDEs - Part I
- On the heat kernel of the Rumin complex and Calderón reproducing formula
- On a critical Choquard-Kirchhoff p-sub-Laplacian equation in ℍn
- A view on Liouville theorems in PDEs
- Schauder estimates on bounded domains for KFP operators with coefficients measurable in time and Hölder continuous in space
- Liouville's type results for singular anisotropic operators
- On the role of embeddability in conformal pseudo-hermitian geometry
- On an evolution equation in sub-Finsler geometry
- One-side Liouville theorems under an exponential growth condition for Kolmogorov operators
Articles in the same Issue
- Research Articles
- C1,α-rectifiability in low codimension in Heisenberg groups
- (In)dependence of the axioms of Λ-trees
- Metric quasiconformality and Sobolev regularity in non-Ahlfors regular spaces
- An approach to metric space-valued Sobolev maps via weak* derivatives
- Gromov-Hausdorff limits of closed surfaces
- Curvature exponent and geodesic dimension on Sard-regular Carnot groups
- Qualitative Lipschitz to bi-Lipschitz decomposition
- On the Borel complexity and the complete metrizability of spaces of metrics
- Metric lines in the jet space
- Contractibility of boundaries of cocompact convex sets and embeddings of limit sets
- Lipschitz extension theorems with explicit constants
- Special Issue: Second Order Subelliptic PDEs - Part I
- On the heat kernel of the Rumin complex and Calderón reproducing formula
- On a critical Choquard-Kirchhoff p-sub-Laplacian equation in ℍn
- A view on Liouville theorems in PDEs
- Schauder estimates on bounded domains for KFP operators with coefficients measurable in time and Hölder continuous in space
- Liouville's type results for singular anisotropic operators
- On the role of embeddability in conformal pseudo-hermitian geometry
- On an evolution equation in sub-Finsler geometry
- One-side Liouville theorems under an exponential growth condition for Kolmogorov operators