Preemptive Scheduling with Controllable Processing Times on Parallel Machines
-
Guiqing Liu
 ,
Kai Li
,
Kai Li

Abstract
This paper considers several parallel machine scheduling problems with controllable processing times, in which the goal is to minimize the makespan. Preemption is allowed. The processing times of the jobs can be compressed by some extra resources. Three resource use models are considered. If the jobs are released at the same time, the problems under all the three models can be solved in a polynomial time. The authors give the polynomial algorithm. When the jobs are not released at the same time, if all the resources are given at time zero, or the remaining resources in the front stages can be used to the next stages, the offline problems can be solved in a polynomial time, but the online problems have no optimal algorithm. If the jobs have different release dates, and the remaining resources in the front stages can not be used in the next stages, both the offline and online problems can be solved in a polynomial time.
1 Introduction
Generally, the scheduling problems assume that the processing times of the jobs are fixed numbers. However, the processing times may be compressed by some extra resources, such as some other budgets, manpower, energy, and so on. Therefore, the production efficiency can be improved by using these extra resources.
In this paper, we assume that the manufacturer with a parallel machine scheduling system can use some extra budgets to compress the processing times of the jobs. Preemption is allowed. Let the extra budgets can shorten the workload at most
Mode 1: Total
Mode 2: Total
Mode 3: Total
The problems can be described as follows. Given n independent jobs Jj(j = 1, 2, · · ·, n), the processing time of the job Jj is
If the job processing times can not be compressed, there are some available research results on the offline and online parallel machine scheduling with preemption. For the offline version, when the jobs arrive at the same time, it can be solved in linear time by the well-known McNaughton’s rule[1]. Hong and Leung[2] gave another modified McNaughton’s rule, in which when
If the job processing times are controllable, some papers considered the scheduling problems without preemption. Most of the papers focused on the single machine problems with different objective functions, such as minimizing the total compression cost plus weighted completion times[3-5], minimize the total compression cost plus weighted completion times[6], the tradeoff curve between the number of tardy jobs and the total amount of allocated resource[7], minimizing the total amount of allocated resource subject to a limited number of tardy jobs[8], minimize a linear combination of scheduling, due date assignment and resource consumption costs[9]. Little literature considered the corresponding parallel machine problems. Jansen and Mastrolilli[10] considered the identical parallel machine scheduling problems with controllable processing times, in which the processing times of the jobs lie in different intervals and the costs depend linearly on the position of the corresponding processing times in the intervals. They presented polynomial time approximation schemes for the problems. Li et al.[11] designed a fast simulated annealing algorithm for the identical parallel machine scheduling problem to minimize the makespan with controllable processing times, which can solve the problems with 1,000 jobs within a reasonable time. Shabtay and Kaspi[12] assumed that the processing times can be compressed by a convex decreasing resource consumption function, and considered the identical parallel machine problems. They show the makespan problem with nonpreemptive jobs is NP-hard. Nowicki and Zdrzalka[13] proposed a bicriterion approach to preemptive scheduling of m identical parallel machines for jobs with controllable processing times. An O(n2) greedy algorithm was given to generate all breakpoints of a piecewise linear efficient frontier by fixing on a resource allocation firstly. Their method was to determine a resource allocation firstly, and then the optimal schedule was obtained.
All the above papers considered the offline scheduling problems. The purpose of this paper is to study the preemptive scheduling with controllable processing times on parallel machines and considers the situations of both offline and online. In Section 2, we give the optimal algorithm for the problem with only one release date. In Section 3, we study the offline scheduling problem with different release dates. The online algorithms are discussed in Section 4. Finally, we draw some concluding remarks in Section 5.
2 The Situation That All the Jobs Arrive at Time Zero
If all the jobs are released at only one time point, the three modes are the same. It can be described as
If the resource allocation scheme is not given, we can use the following algorithm A1 to solve this problem.
Algorithm
A1for
Step 1 Let x = 0. Sort all jobs in non-increasing order of basic processing time, i.e.,
Step 2 If
Step 3 Schedule the longest job on one machine and delete the job. Decrement m by 1. If the longest job is the last job, then go to Step 4, else go to Step 2.
Step 4 Use all of the resource
See Figure 1, for the situation that all the jobs arrive at the same time, the Step 1 of Algorithm A1 is to obtain a solution for the corresponding problem with x = 0 by using the Modified McNaughton’s rule, and get the makespan is Cmax(s1,0). The second step is to shorten the makespan backward by using the extra resources and obtain the makespan Cmax(s, x).
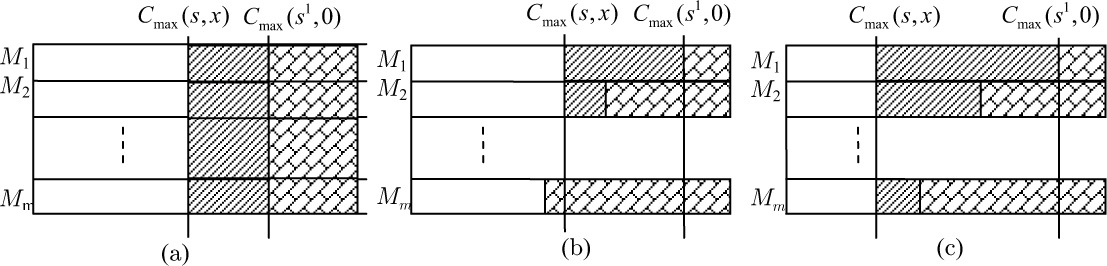
Three cases of the situation with the same release time
Theorem 1
For
Proof
To prove the algorithm A1 is optimal for the problem
(i) Let the schedule s1 be obtained in Step 1, then s1 is optimal for the corresponding problem Pm|pmtn|Cmax according to Hong & Leung[2]. Case 1. s1 is a block schedule. Then it is apparent that there is no another resource allocation scheme can shorten the Cmax less than Cmax(s, x). See Figure 1(a). Case 2. All s1 and s are not block. See Figure 1(b). Let the machine Mk is the first machine on which the maximal completion time equals to
(ii) (s, x) is optimal under the resource allocation x, so if there is another optimal solution (s*,x*), and Cmax(s*,x*) <Cmax(s,x), it is not doubt that x* ≠ x. Because (s*, x*) is optimal, it must be
Therefore, there is no another resource allocation scheme x* and its corresponding schedule s* such that Cmax(s*,x*) < Cmax(s,x).
3 The Offline Version of Problem with Different Release Dates
When the jobs are released at different times, we can build the following algorithm A2 to solve the problem
Algorithm
A2for Modes 1 and 2 of
Step 1 At each preemptive time (there is a job is finished or a new batch of jobs arrive), do
Let x = 0. Sort all the unfinished jobs or job pieces in non-increasing order of basic processing time. Let the number of the unfinished jobs or job pieces is n.
If
Schedule the longest job on one machine and delete the job. Decrement m by 1. Go to 2).
Step 2 Use all of the resource
Theorem 2
For Modes 1 and 2 of the problem
Proof
Let x and s be the resource allocation and sequencing schemes according to algorithm A2 for the problem
If there is no job, which is released in one of the some front stages, is compressed in the last stage of the solution (s*,x*), then (s*,x*) must be the same with (s,x) according to Theorem 1. So we assume that there is a job Jj is not released in the last stage and it is compressed in one of the front stages in (s*,x*), and show that it can not be optimal. Let
Case 1. There are some idle times before the last stage in (s*,x*). See Figure 2. If the solution (s*,x*) likes Figure 2(a), then if we allocate

Case 1 of Theorem 2
Case 2. There is no idle time before the last stage and (s*,x*) is not block. See Figure 3. Let the machine k(k ≥ 2) is the first machine on which the maximal completion time equals to
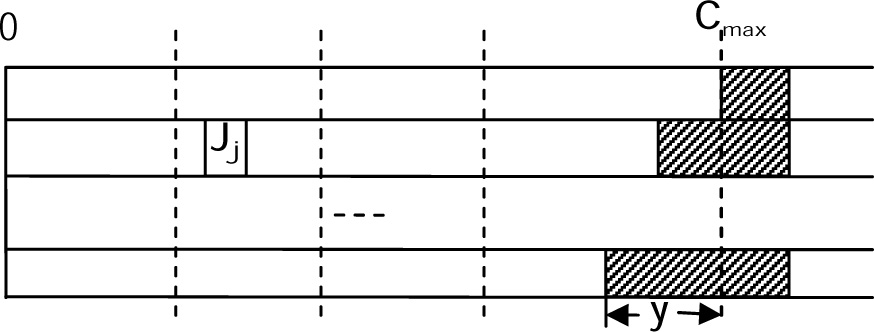
Case 2 of Theorem 2
Case 3. There is no idle time before the last stage and (s*,x*) is block. See Figure 4. In this case, if we release the resources
Therefore, Algorithm A2 is optimal for the problem

Case 3 of Theorem 2
Though Algorithm A2 is optimal for Mode 1 and Mode 2 of the problem
Example 1
There are 3 machines. At time 0, the available resource amount is 1, i.e.,
Then the solution obtained by A2 is like Figure 5(a) and Cmax = 6(

Example 1
Algorithm A3
At each stage at time t (a new batch jobs arrive), do
Let x = 0. Sort all the unfinished jobs or job pieces in non-increasing order of basic processing time. Let the number of the unfinished jobs or job pieces is n.
If
Schedule the longest job on one machine and delete the job. Decrement m by 1. If the longest job is the last job, then go to 4), else go to 2).
Use the available resources
Theorem 3
For Mode 3 of the problem
This theorem is simple to prove. Because in Mode 3 of the problem with different release times, the extra resources can only be used in the current stage but not in the successive stages, we must use the available resources to shorten the maximal completion times in the current stages. But when the maximal completion time of the current stage is shortened before the start time of the next stage, it is not useful to compress the jobs any more, and then we can stop to allocate the resources in the current stage. In each stage, the method in Algorithm A3, is optimal according to Theorem 1.
4 The Online Version of the Problem with Different Release Dates
In this section, we firstly show that no optimal online scheduling algorithm for Mode 1 and Mode 2 of the parallel machine scheduling problem with different release dates.
Theorem 4
There is no optimal algorithm for Modes 1 and 2 of the online version of the problem
Proof
We prove that the theorem is true for m = 2; it is easy to see that the proof can be generalized to m > 2. Suppose there is an optimal online scheduler for 2 machines and consider the following scenario. At time 0,
As a result of Theorem 4, we are motivated to construct online scheduling algorithm for Mode 3 of the online version of the problem
Algorithm A4
Whenever a new batch of jobs arrive at t, do
Unite the unfinished jobs with the remainder compressed parts to the new batch jobs.
Let x = 0. Sort all the new batch jobs in non-increasing order of basic processing time. Let the number of the new batch is n.
If
Schedule the longest job on one machine and delete the job. Decrement m by 1. If the longest job is the last job, then go to 5), else go to 3).
Use all available resources
Theorem 5
Algorithm A4 is optimal for Mode 3 of the online version of the problem
It is clear true optimal for this situation according to Theorem 3 though the extra resource maybe is wasted.
5 Conclusions
In this paper, we study the parallel machine scheduling problems with controllable processing times and preemption. We assume that the extra resource can be used under three models to compress the processing times of the jobs. Model 1 is that all the resources are given at time zero and can be used all the stages. Models 2 and 3 are that all the resources are divided into some parts with different release dates. The difference is that the remaining resources in the front stages can be used to the next stages in Model 2, but it is not the case in Model 3. When the jobs are released at the same time, all the three models are identical, we prove that the problem can be solved in a polynomial time by using algorithm A1 in this paper. When the jobs have different release dates, all the offline versions of the problems in Models 1, 2 and 3 and the online version of the problems in Model 3 can be solved in polynomial times, however the online version of the problems in Model 1 and 2 have no optimal algorithm. We propose the algorithms and prove the related results.
The further research work on this work may assume that when using the extra resources to compress the processing times of the jobs, the jobs have different compressed weight values.
References
[1] McNaughton R. Scheduling with deadlines and loss functions. Management Science, 1959, 6: 1–12.10.1287/mnsc.6.1.1Search in Google Scholar
[2] Hong K S, Leung J Y T. On-line scheduling of real-time tasks. IEEE Transactions on Computers, 1992, 41(10): 1326-1331.10.1109/REAL.1988.51119Search in Google Scholar
[3] Vickson R G. Choosing the job sequence and processing times to minimize total processing plus flow cost on a single machine. Operations Research, 1980, 28: 1155–1167.10.1287/opre.28.5.1155Search in Google Scholar
[4] Wan G, Yen B P C, Li C L. Single machine scheduling to minimize total compression plus weighted flow cost is NP-hard. Information Processing Letters, 2001, 79: 273–280.10.1016/S0020-0190(01)00143-0Search in Google Scholar
[5] Janiak A, Kovalyov M Y, Kubiak W, et al. Positive half-product and scheduling with controllable processing times. European Journal of Operational Research, 2005, 165: 413–422.10.1016/j.ejor.2004.04.012Search in Google Scholar
[6] Wang J B, Xia Z Q. Single machine scheduling problems with controllable processing times and total absolute differences penalties. European Journal of Operational Research, 2007, 177: 638–645.10.1016/j.ejor.2005.10.054Search in Google Scholar
[7] Danial R L, Sarin R K. Single machine scheduling with controllable processing times and number of jobs tardy. Operations Research, 1989, 37(6): 981-984.10.1287/opre.37.6.981Search in Google Scholar
[8] Cheng T C E, Chen Z L, Li C L. Single-machine scheduling with trade-off between number of tardy jobs and resource allocation. Operations Research Letters, 1996, 19: 237–242.10.1016/S0167-6377(96)00035-1Search in Google Scholar
[9] Ng C T D, Cheng T C E, Kovalyov M Y, et al. Single machine scheduling with a variable common due date and resource-dependent processing times. Computers & Operations Research, 2003, 30: 1173–1185.10.1016/S0305-0548(02)00066-7Search in Google Scholar
[10] Jansen K, Mastrolilli M. Approximation schemes for parallel machine scheduling problem with controllable processing times. Computers & Operations Research, 2004, 31: 1565–1581.10.1016/S0305-0548(03)00101-1Search in Google Scholar
[11] Li K, Shi Y, Yang S, et al. Parallel machine scheduling problem to minimize makespan with resource dependent processing times. Applied Soft Computing, 2011, 11(8): 5551–5557.10.1016/j.asoc.2011.05.005Search in Google Scholar
[12] Shabtay D, Kaspi M. Parallel machine scheduling with a convex resource consumption function. European Journal of Operational Research, 2006, 173(1): 92-107.10.1016/j.ejor.2004.12.008Search in Google Scholar
[13] Nowicki E, Zdrzałka S. A bicriterion approach to preemptive scheduling of parallel machines with control-lable job processing times. Discrete Applied Mathematics, 1995, 63: 237–256.10.1016/0166-218X(94)00071-5Search in Google Scholar
© 2015 Walter de Gruyter GmbH, Berlin/Boston
Articles in the same Issue
- Innovation of Express Freight Product for Chinese Railways
- DEA Cross-Efficiency Evaluation Method Based on Good Relationship
- A Dynamic Clustering Method to Large-Scale Distribution Problems
- Managing Pricing of Closed-Loop Supply Chain Under Patent Protection
- A Comparison of Control Variate Methods for Pricing Interest Rate Derivatives in the LIBOR Market Model
- Designing the Optimal Extended Warranty Price with Indirect Network Effect
- Preemptive Scheduling with Controllable Processing Times on Parallel Machines
- Port Multi-Period Investment Optimization Model Based on Supply-Demand Matching
- Heavy OWA Operator of Trapezoidal Intuitionistic Fuzzy Numbers and its Application to Multi-Attribute Decision Making
Articles in the same Issue
- Innovation of Express Freight Product for Chinese Railways
- DEA Cross-Efficiency Evaluation Method Based on Good Relationship
- A Dynamic Clustering Method to Large-Scale Distribution Problems
- Managing Pricing of Closed-Loop Supply Chain Under Patent Protection
- A Comparison of Control Variate Methods for Pricing Interest Rate Derivatives in the LIBOR Market Model
- Designing the Optimal Extended Warranty Price with Indirect Network Effect
- Preemptive Scheduling with Controllable Processing Times on Parallel Machines
- Port Multi-Period Investment Optimization Model Based on Supply-Demand Matching
- Heavy OWA Operator of Trapezoidal Intuitionistic Fuzzy Numbers and its Application to Multi-Attribute Decision Making