Accelerating process control and optimization via machine learning: a review
-
Ilias Mitrai
 and
Prodromos Daoutidis
and
Prodromos Daoutidis

Abstract
Process control and optimization have been widely used to solve decision-making problems in chemical engineering applications. However, identifying and tuning the best solution algorithm is challenging and time-consuming. Machine learning tools can be used to automate these steps by learning the behavior of a numerical solver from data. In this paper, we discuss recent advances in (i) the representation of decision-making problems for machine learning tasks, (ii) algorithm selection, and (iii) algorithm configuration for monolithic and decomposition-based algorithms. Finally, we discuss open problems related to the application of machine learning for accelerating process optimization and control.
1 Introduction
The design and operation of chemical processes depend on decisions spanning a wide range of scales, from the molecular up to the enterprise-wide, and constrained by multiple physical and chemical phenomena (Daoutidis et al. 2018; Grossmann 2012; Hanselman and Gounaris 2016; Pistikopoulos et al. 2021). Process control and optimization methods provide a systematic framework to identify the best possible decisions in designing and operating a process, subject to constraints that emerge from physics or design and operational considerations. Over the last few decades, there have been significant advances in both theory and algorithm development regarding the control of nonlinear and constrained process systems (Christofides et al. 2013; Daoutidis et al. 2023b; Ellis et al. 2014; McAllister and Rawlings 2022; Mesbah 2016; Shin et al. 2019), as well as the solution of broad classes of optimization problems (Biegler 2024; Boukouvala et al. 2016; Grossmann et al. 2016; Tawarmalani and Sahinidis 2005; Wächter and Biegler 2006).
Despite these advances, control and optimization problems that challenge the computational performance of state-of-the-art algorithms continue to emerge. Some examples of application domains where such problems occur include the real-time operation of chemical processes interacting with renewable energy resources, the decarbonization of the energy sector, and the design of resilient, sustainable and circular supply chain networks (National Academies of Sciences Engineering and Medicine 2022). The scale and complexity in these systems and the multiple spatial and temporal scales that are often present make the solution of the corresponding control and optimization problems challenging. Different approaches have been followed to improve the tractability of such problems. For example, one can potentially reduce the computational complexity by reformulating the problem (Liberti and Pantelides 2006; Raghunathan and Biegler 2003). However, finding a suitable exact reformulation is generally not possible. Data-driven approaches namely surrogate and hybrid modeling, have also been developed to learn a surrogate model with lower computational complexity (Bhosekar and Ierapetritou 2018; Bradley et al. 2022; Cozad et al. 2014; Misener and Biegler 2023; Sansana et al. 2021). Although this approach has received significant attention, the solution returned is (inherently) approximate.
An alternative approach is to accelerate the solution process itself by (1) selecting a solution strategy (algorithm selection) and (2) tuning it (algorithm configuration) such that a desired performance function like solution time is minimized. The acceleration is usually achieved by exploiting some underlying property of the decision-making problem. An example is the case of structured decision-making problems, where the structure can be used as the basis of decomposition-based optimization algorithms, which are usually faster than monolithic algorithms for large-scale problems (Conejo et al. 2006). Although this approach does not compromise solution quality, selecting and tuning a solution algorithm is nontrivial. Current state-of-the-art algorithms or solvers, especially commercial ones, are complex systems with many algorithmic steps, each one potentially having a set of hyperparameters. Furthermore, the quantitative effect of the problem formulation on the performance of an algorithm, such as solution time, is not known a-priory, i.e., the selection and tuning of the algorithm are black-box optimization problems since the solution time or quality (for local solvers) cannot be determined a-priory.
To this end, machine learning (ML) can be used to learn the behavior of an algorithm for a class of decision-making problems from data. ML has been widely used in chemical engineering for modeling chemical and physical systems and developing data-driven optimization and control algorithms (Bhosekar and Ierapetritou 2018; Bradley et al. 2022; Cozad et al. 2014; Daoutidis et al. 2023a; Sansana et al. 2021; Schweidtmann et al. 2021; Tang and Daoutidis 2022). Usually, data is used to learn a system’s chemical, physical, or control-relevant properties. In the context of algorithm selection and configuration, the data is used to learn the effect of the problem formulation on the computational performance of an algorithm.
The application of ML for accelerating an algorithm has recently received significant attention in the operations research and computer science communities and has shown the potential for significant computational savings (Bengio et al. 2021). This approach has received less attention in the chemical engineering literature, where the emphasis has been on improving the problem formulation and developing new optimization algorithms with well-characterized optimality properties. ML has been mainly used to analyze the solution time for production scheduling optimization problems (Kim and Maravelias 2022) and accelerate decomposition-based algorithms for the solution of mixed integer model predictive control (Mitrai and Daoutidis 2024a,d), supply chain optimization (Triantafyllou and Papathanasiou 2024), and capacity expansion problems (Allen et al. 2023). Decision-making problems that arise in chemical engineering have certain features, such as nonlinearity in the form of bilinear terms (flowrate multiplied by concentration) or exponentials with continuous variables
In this paper, we aim to review the algorithm selection and configuration problems, review recent advances in using ML to accelerate the solution of decision-making problems and discuss open problems and future directions for applying this approach to chemical engineering problems. In Section 2, we formally introduce the algorithm selection and configuration problems. In Section 3, the representation of an optimization problem in a format that can be used as input to standard ML models is discussed. In Sections 4–6, we present the application of ML for selecting and tuning an algorithm, and finally, in Section 7, we discuss open problems and opportunities related to the acceleration of numerical algorithms using machine learning.
2 The algorithm configuration and selection problems
2.1 The algorithm selection problem
Consider a general decision-making problem
where
Algorithm selection.
Given an optimization problem P(p) and a set of algorithms
The performance function m is a metric used to compare two algorithms. Typical performance functions can be the computational time or the solution quality for a given computational budget. The choice of the performance function depends on the application. For example, solution time might be more important for an online application, whereas solution quality and feasibility might be better for a design or safety-critical application.
Given a decision-making problem, the set of available algorithms, and a performance function, algorithm selection can be posed as an optimization problem as follows
This problem is also known as per-instance algorithm selection since it considers only a specific decision-making problem. However, it can be easily extended to identify the best algorithm for a class of decision-making problems (Kerschke et al. 2019).
The algorithm selection problem is a black-box optimization problem since the performance function m is not known explicitly, and evaluating an algorithm for a given problem can require significant computational resources. The standard approach to solving this problem relies on ML, where data are used to approximate the performance function, and the best algorithm is selected based on the predictions of the learned model.
2.2 Algorithm configuration
Once an algorithm is selected, the next step is tuning of the algorithm. Let’s consider the case where an algorithm α with parameters π α is available to solve a decision-making problem P(p) (Eq. (1)). We will refer to the parameters of the algorithm π α as hyperparameters in order to distinguish them from the parameters of the decision-making problem p. The values of the hyperparameters π α , also known as tuning or configuration, have a significant effect on the computational performance of the algorithm. Usually, these hyperparameters are selected by considering the average performance of the algorithm over a set of instances. However, one can exploit specific features of a problem and find a tuning that is optimal for the specific instance. This problem is formally known as the per-instance algorithm configuration problem and is stated as follows (Eggensperger et al. 2019; Schede et al. 2022):
Algorithm configuration.
Given a decision-making problem P(p), and an algorithm α with hyperparameters π
α
∈ Π
α
find hyperparameters
The algorithm configuration problem has three components. The first is the decision-making problem P(p), which is given. The second is the space of possible configurations Π
α
, which is algorithm dependent. For example, in gradient descent algorithms, a common hyperparameter is the step size (or learning rate), which is a positive number, i.e.,
The solution to the algorithm configuration problem is challenging. First, the performance function
The first approach to solving the algorithm configuration problem is to rely on sampling-based black-box optimization algorithms. Although this approach has been extensively used in the literature (Chen et al. 2011; Hutter et al. 2009, 2010, 2011; Liu et al. 2019), it can be slow for online applications, where given a decision-making problem, one must quickly find the best configuration of the algorithm and implement it. In such cases, ML can be used to learn (or approximate) offline either the performance function
2.3 Relation between algorithm selection and configuration
The algorithm selection and configuration problems share several characteristics. First, algorithm configuration can be considered as a special case of algorithm selection. Specifically, each configuration of an algorithm can be considered as a different algorithm, and thus, identifying the best possible configuration is equivalent to selecting the best algorithm. This can be considered as a simultaneous algorithm selection and configuration approach since one must consider simultaneously all the possible combinations of algorithms and configurations. In general, algorithm configuration is usually more challenging than algorithm selection since the search space is much larger. The algorithm selection problem has one degree of freedom, the algorithm to be used, and the number of available algorithms is usually small. However, in the algorithm configuration problem, the degrees of freedom are equal to the number of hyperparameters, and the possible number of configurations can be very large.
Both problems can be solved either via black-box optimization or ML-based approaches. In general, black-box methods have been used for offline applications where a solver is tuned to perform well on average for a given set of instances. Black-box optimization methods require a function evaluation, i.e., computing the performance function m for a given problem. In the context of algorithm selection and configuration, this translates to solving the decision-making problem P(p) to optimality and obtaining the value of the performance function. This approach cannot be applied in an online setting where one has to identify the best algorithm or tuning without solving the problem. In such cases, one must learn a surrogate model from data offline and then use it for inference online.
Finally, the tasks of selecting and tuning an algorithm, as presented in Sections 2.1 and 2.2, can be considered static problems since they are solved only once. In general, algorithm selection and configuration can be performed multiple times when solving a decision-making problem, leading to dynamic algorithm selection and configuration problems. Consider, for example, branch and bound-based algorithms where different solvers can be used at different nodes in the tree (Markót and Schichl 2011) or even different solver tuning. This difference (static or dynamic) motivates the adoption of different solution strategies (see Figure 1). The static case is a one-step decision-making problem since, given an optimization problem (Eq. (1)), the ML model is used to identify the best algorithm or tuning. On the contrary, the dynamic case requires constant interaction between an ML model and the algorithm. Given the decision-making problem (Eq. (1)) and the state of the solution process, the ML model determines the best configuration for the algorithm; this is a multi-step decision-making problem. This difference motivates the application of supervised and reinforcement learning for algorithm selection and configuration as presented in the next sections.
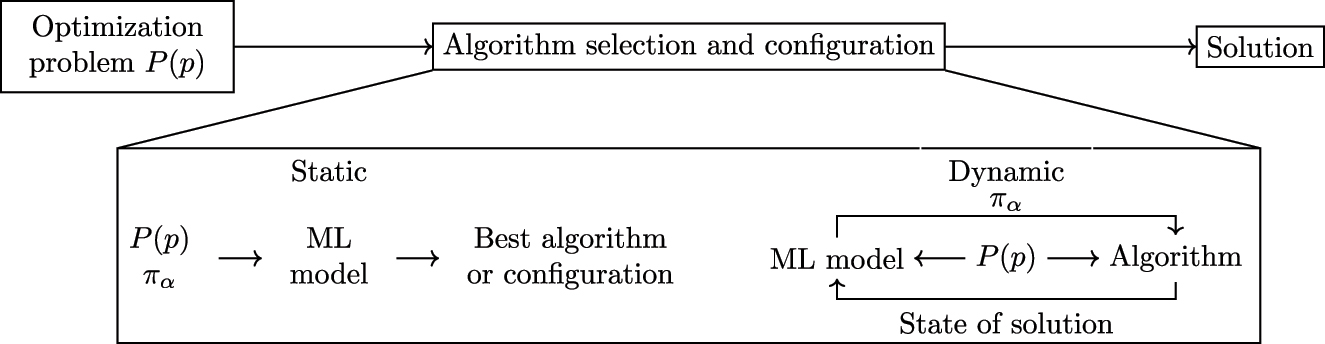
High level overview of ML-based solution approaches for algorithm selection and configuration.
3 Decision-making problems as inputs to ML models
Let’s consider the case where an ML model
3.1 Vectorial feature representation
The standard approach to achieve the above requirements is to extract a set of easily computable features
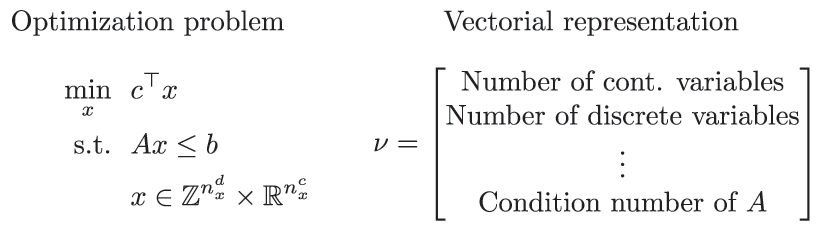
Vectorial feature representation of an optimization problem.
3.2 Graph representation
An alternative approach to represent a decision-making problem is a graph that can capture the interaction pattern between the variables and constraints. A graph
Three graphs can be used to represent a decision-making problem (Allman et al. 2019). The first and most generic one is the bipartite variable-constraint graph
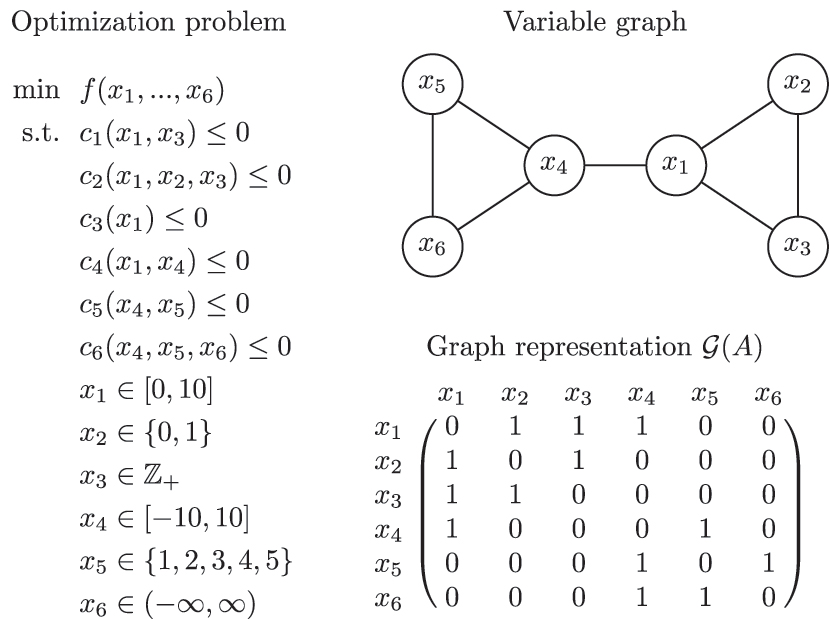
Graph representation of an optimization problem.
The graph representation captures the structural coupling between the constraint and the variables, i.e., the presence or not of a variable in a constraint, as reflected in the adjacency matrix, as well as the strength of interaction captured via the edge weights. Such representations have been used extensively for developing control architectures, as well as implementing decomposition-based optimization and control algorithms (Allman et al. 2019; Aykanat et al. 2004; Bergner et al. 2015; Ferris and Horn 1998; Jalving et al. 2022; Jogwar and Daoutidis 2017; Khaniyev et al. 2018; Michelena and Papalambros 1997; Moharir et al. 2017; Rio-Chanona et al. 2016; Shin et al. 2021; Tang et al. 2018; Wang and Ralphs 2013).
Under this representation, a decision-making problem, and in general a system of equations, is represented by a graph
3.3 Graph representation with nodal and edge features
Although the graph representation captures the structure of the problem, it does not account for the domain of the variables and the functional form in which they appear in the constraints. To achieve this, a set of features can be associated with each node and edge in the graph. For example, in the bipartite graph representation, a set of features
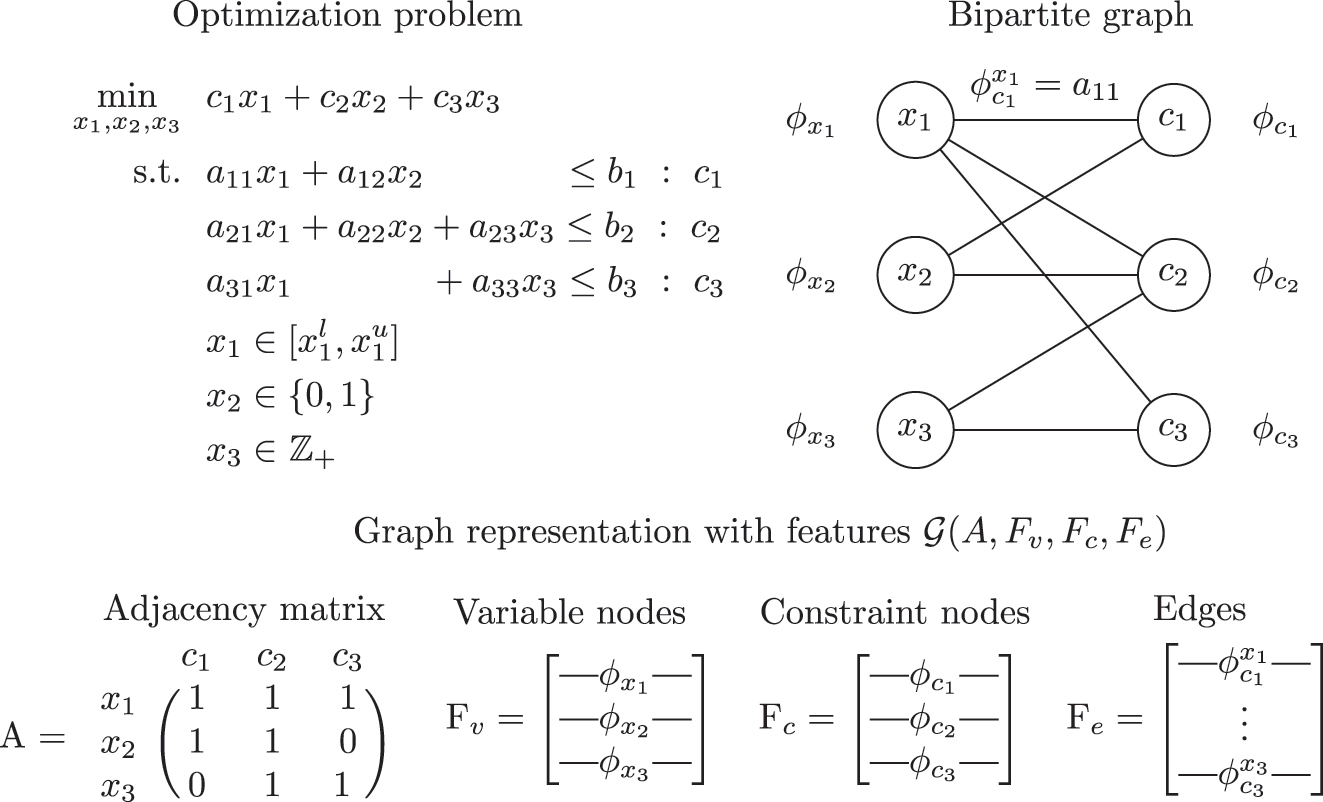
Graph representation with features of a mixed integer linear optimization problem.
This representation has been extensively used for Mixed Integer Linear Programming problems (Ding et al. 2020; Gasse et al. 2019; Gupta et al. 2020, 2022; Li et al. 2022; Liu et al. 2022; Nair et al. 2020; Paulus et al. 2022). Some examples of features include the domain of the variables for the variable nodes, the type of constraint (equality or inequality) for the constraint nodes, and the coefficient of a variable in an edge for the edges. The ability of this representation to distinguish between different optimization problems has been proven rigorously for specific classes of LP and MILP problems and for specific tasks such as predicting optimal solution and feasibility (Chen et al. 2022a,b).
Remark 3.1.
The representations presented in this section can be used as inputs to a surrogate model that predicts the computational performance of an algorithm. To this end, the following question arises: Which representation should be used? The chosen representation should be able to represent the key characteristics of a problem that affect the computational performance of a solver. Furthermore, the selection of the representation will determine the class of ML models that can be used. The vectorial representation can be used with interpretable models, such as decision trees and linear regression, as well as noninterpretable models, such as neural networks, random forests, gaussian processes, etc. The graph representation requires geometric deep learning models (Bronstein et al. 2017, 2021), such as graph neural networks, which are not inherently interpretable. This selection affects our ability to understand the computational performance of a solver (see Section 7.2 for a detailed discussion on this).
4 Learning to select a solution strategy
Given the aforementioned representations, first, we focus on the application of ML techniques for algorithm selection. One approach relies on regression to predict the value of the performance function for a given problem and then select the best algorithm. For each available algorithm α, data are generated to approximate the performance function m
α
with a surrogate
An alternative approach is to approximate the solution of the algorithm selection problem itself, i.e., approximate the mapping
Yet another solution approach is based on case-based reasoning, an artificial intelligence approach where a task is solved based on the solution of other similar tasks (Kolodner 1992). In the context of algorithm selection, for a given problem, an algorithm α is selected based on its performance in similar instances. Case-based reasoning has been used to select whether a constraint programming or mixed integer programming approach should be used to solve a bid evaluation problem in combinatorial auctions using as features some properties of the graph representation of the problem, such as graph density, node degree, etc. (Guerri and Milano 2004).
5 Learning to configure an algorithm
The problem of learning to configure an algorithm has received significant attention from the operations research, computer science, and ML/AI communities. We hereby focus only on the acceleration of optimization algorithms for the solution of linear, mixed integer linear, and mixed integer nonlinear optimization problems. A decision-making problem can be solved either monolithically, where an algorithm considers all the variables simultaneously, or using a decomposition-based algorithm, where the problem is decomposed into a number of subproblems that are solved iteratively. Given the different nature of monolithic and decomposition-based algorithms, different algorithm configuration tasks arise. Thus, we consider the configuration of these algorithms separately.
5.1 Configuring monolithic solvers
5.1.1 Initialization
Initialization of an optimization algorithm is not usually considered a hyperparameter, yet it can have a significant effect on its computational performance. Usually, intuition and heuristics are used to identify a good feasible solution. However, the development of such initialization approaches is time consuming.
ML has been used to predict the optimal solution of a class of decision-making problems and use the prediction either as an initial guess or to fix some of the variables of the problem. This approach relies on input–output data
An alternative approach is to approximate the iterative nature of optimization algorithms via ML models, i.e., emulate the evolution of the variables’ values during the solution process. This approach has been used to emulate interior point solvers for predicting the solution of optimal power flow problems (Baker 2022) using the feature representation and general linear optimization problems (Qian et al. 2024) using the graph representation of the problem with features. These initialization approaches are based on the assumption that an initial guess close to the optimal solution will reduce the computational time. The main limitation of these initialization approaches is that the prediction is not necessarily feasible. Therefore, a feasibility restoration step is required to construct a feasible solution (Chen et al. 2024; Kotary et al. 2021). Alternatively, one can develop/compute rigorous bounds on the output of the ML model (Hertneck et al. 2018; Paulson and Mesbah 2020) to guarantee constraint satisfaction.
5.1.2 ML for preprocessing
Another key component of modern optimization solvers is preprocessing, a set of techniques used to reformulate the optimization problem and usually strengthen its relaxation (Achterberg et al. 2020). An example of a preprocessing procedure is bound tightening, where given a decision-making problem, the bounds of the variables are updated based on optimality and feasibility arguments. The former is known as optimality based bound tightening (OBBT), where given a decision-making problem, first the problem is convexified, and then the maximum and minimum value that a variable can take is found. This approach has been shown to lead to a reduction in solution time; however, it requires the solution of two optimization problems for each variable. ML has been used to determine the variables for which OBBT should be applied (Cengil et al. 2022). This approach has been applied to the solution of optimal power flow problems where the ML model takes as input a vectorial representation of the parameters of the optimization problem and predicts the variables for which application of OBBT leads to the best bound. Finally, we note that a similar approach has been developed for the case of feasibility based bound tightening (FBBT) (Nannicini et al. 2011) where the goal is to compute updated (tighter) bounds for all the variables while satisfying the constraints.
5.1.3 ML for branch and bound
Branch and bound is the backbone of mixed-integer optimization solvers. In this approach, given a mixed-integer linear optimization problem of the form
branch and bound starts by solving the continuous relaxation, i.e., setting
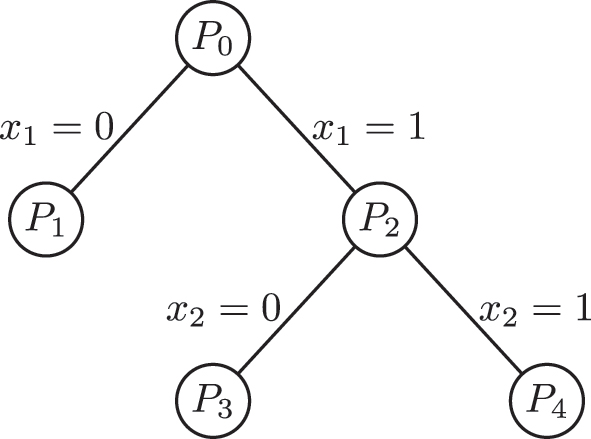
Branch and bound tree for a mixed integer linear optimization problem with two binary variables.
Several ML-based approaches have recently been proposed to automate and reduce the computational effort related to making optimal decisions during the branch and bound solution process for mixed integer linear optimization problems (Lodi and Zarpellon 2017). For variable selection, most approaches rely on the concept of imitation learning, where an ML model tries to copy the behavior of an expert, such as strong branching for the case of variable selection. This approach relies either on the vectorial representation of the problem (Alvarez et al. 2017; Khalil et al. 2016) or the graph representation with features (Gasse et al. 2019). An alternative approach is to exploit the sequential nature of variable selection and use reinforcement learning to find the variable to branch (Etheve et al. 2020; Huang et al. 2022; Parsonson et al. 2023; Scavuzzo et al. 2022). Finally, based on the relation between algorithm configuration and selection, the selection of a branching strategy has also been posed as an algorithm selection task for mixed integer linear problems (Di Liberto et al. 2016) and for spatial branching for polynomial optimization problems (Ghaddar et al. 2023).
Regarding node selection, two approaches have been proposed. In the first, node selection is posed as a Markov decision process and a policy is learned to determine which node to solve using imitation learning (He et al. 2014; Labassi et al. 2022). The alternative is to pose node selection as a multiarm bandit problem, where given a set of options, one must select an option that will lead to the highest reward. In the context of node selection, the options correspond to the available nodes to explore, and the reward can be either the solution time or the size of the branch and bound tree to be explored (Sabharwal et al. 2012).
5.1.4 ML for cutting planes
An important component of mixed-integer optimization algorithms/solvers is cutting planes (Dey and Molinaro 2018). These are usually linear inequalities that reduce the search space without affecting optimality. However, selecting which cutting plane to add is nontrivial since multiple types of cutting planes can be generated, and different numbers of cutting planes can be added during branch and bound. Mixed-integer optimization solvers create a pool of cuts and add them based on heuristics.
Similar to learning to branch, ML can be used to select which cuts to add. These approaches usually learn a model that approximates the outcome of an expert, i.e., a rule or heuristic, that identifies the best possible cut (Baltean-Lugojan et al. 2019; Marousi and Kokossis 2022; Paulus et al. 2022). The addition of cutting planes can also be considered as a multistep process since cuts can be added to the root node as well as the other nodes that are explored during branch and bound. This has been considered in (Berthold et al. 2022), where a regression model is used to determine whether using local cuts at a node of the branch and bound tree can lead to a reduction in solution time. The alternative is to rely on reinforcement learning to determine which cuts to add in each node of the branch and bound tree (Tang et al. 2020; Wang et al. 2023).
5.2 Configuring all the parameters of a solver simultaneously
The ML approaches for algorithm configuration consider a specific aspect of the algorithm. One could consider all the parameters of a solver simultaneously. In this case, supervised, unsupervised, and reinforcement learning can be potentially used to identify the best configuration. Such approaches have been proposed for tuning mixed integer optimization solvers (Bartz-Beielstein and Markon 2004; Hutter et al. 2006, 2009, 2010; Iommazzo et al. 2020; Xu et al. 2011).
This approach can in principle exploit synergies between different parts of an algorithm or a solver. However, it leads to a significant increase in the complexity of the configuration and, subsequently, learning tasks. Furthermore, new architectures might be necessary to capture detailed information about the decision-making problem and the algorithm. For example, the graph representation with features and graph neural networks can guide the variable selection search during branch and bound. The algorithm, however, is usually represented as a vector, and each entry denotes the value of a hyperparameter. Therefore, new architectures and representations might be necessary to simultaneously capture information about the problem formulation and the algorithm configuration. Finally, we note that these ML-based approaches usually cannot provide guarantees regarding the performance of a solver or a configuration. This has motivated systematic analysis and design of numerical algorithms using data-driven (Balcan et al. 2024; Dietrich et al. 2020; Doncevic et al. 2024; Sambharya and Stellato 2024) and mathematical programming approaches (Das Gupta et al. 2024; Drori and Teboulle 2014; Mitsos et al. 2018). A list with the application of different ML approaches and the associated references for algorithm selection and configuration can be found in Table 1.
Algorithm selection and configuration for different classes of optimization problems.
6 Learning to configure decomposition-based algorithms
Decomposition-based optimization algorithms have been extensively used to solve large-scale decision-making problems. Unlike monolithic approaches where all the variables are considered simultaneously, decomposition-based algorithms decompose the variables (and constraints) into a number of subproblems that are solved repeatedly. Most decomposition-based algorithms can be classified either as distributed or hierarchical. The main difference lies in the sequence upon which the subproblems are solved. In distributed algorithms, all the subproblems are solved in parallel and are coordinated via dual information, whereas in hierarchical algorithms, the subproblems are solved sequentially and are coordinated either via dual information or cuts (for the case of cutting plane-based algorithms). In general, the solution of a decision-making problem with a decomposition-based algorithm has three steps: (1) problem decomposition, (2) selection of coordination scheme, and (3) configuration. These steps can be considered as hyperparameters of a decomposition-based algorithm; therefore, several algorithm configuration problems must be solved prior to the implementation of decomposition-based algorithms. A list with the various ML-based approaches and corresponding references for accelerating decomposition-based algorithms can be found in Table 2.
Algorithm selection and configuration for decomposition-based optimization algorithms.
| Task | Decomposition-based algorithm | ||
|---|---|---|---|
| Benders and generalized Benders decomposition |
Column generation | Lagrangean decomposition | |
| Structure detection | Michelena and Papalambros (1997), Wang and Ralphs (2013), Ferris and Horn (1998), Aykanat et al. (2004), Jalving et al. (2022), Bergner et al. (2015), Khaniyev et al. (2018), Tang et al. (2018), Allman et al. (2019), Rio-Chanona et al. (2016), Mitrai and Daoutidis (2020), Mitrai et al. (2022), Mitrai and Daoutidis (2021), Tang et al. (2018), and Basso et al. (2020) | ||
| Initialization | Mitrai and Daoutidis (2024b,c) | Demelas et al. (2023) and Biagioni et al. (2020) | |
| Coordination via cutting planes | Jia and Shen (2021) and Lee et al. (2020) | Morabit et al. (2021) and Chi et al. (2022) | |
6.1 Learning the structure of an optimization problem
The decomposition of an optimization problem is the basis for the application of a decomposition-based optimization algorithm and can have a significant effect on the computational performance of the algorithm. Traditionally, a decomposition was obtained using intuition about the coupling (structure) among the variables and constraints. Although this approach has been applied extensively, identifying the underlying structure of a problem is time-consuming and may not even be possible using only intuition.
Several automated structure detection methods have been proposed in the literature. These approaches rely on the graph representation of an optimization problem as represented in Section 3.2. Given the graph of a decision-making problem, graph partitioning algorithms are used to decompose the graph, i.e., the decision-making problem, into a number of subproblems. Typical algorithms include hypergraph partitioning (Aykanat et al. 2004; Ferris and Horn 1998; Jalving et al. 2022; Michelena and Papalambros 1997; Wang and Ralphs 2013) and community detection (Allman et al. 2019; Bergner et al. 2015; Khaniyev et al. 2018; Mitrai and Daoutidis 2020; Rio-Chanona et al. 2016; Tang et al. 2018). These graph partitioning methods usually make a-priory assumptions about the number of subproblems and the interaction patterns among them. To overcome these limitations, we have recently proposed the application of stochastic block modeling and Bayesian inference for estimating the structure of an optimization problem (Mitrai and Daoutidis 2021; Mitrai et al. 2022). This approach assumes that the graph of an optimization problem is generated by a probabilistic model with parameters b that capture information about the partition of the nodes into blocks and ω which captures interaction pattern between the blocks. The parameter b is a vector where the ith entry denotes the block membership of node i in the partition of the graph. For the variable graph, this parameter denotes the block membership of each variable, whereas in the constraint graph, the block membership of each constraint. Given the graph of a decision-making problem, the parameters b are estimated or ‘learned’ via Bayesian inference. The estimated structure can be used as the basis for the application of distributed and hierarchical decomposition-based algorithms.
Finally, we note that regarding problem decomposition, the aforementioned approaches rely on the assumption that decomposing a decision-making problem based on the underlying structure leads to good computational performance. Although this has been shown to be a good assumption for a large class of problems (Basso et al. 2020; Tang et al. 2018), it is not guaranteed that a structure-based decomposition is the best possible one. An example is the case of the solution of two-stage stochastic optimization problems using Benders decomposition. Traditionally, the original problem is decomposed into a master problem, which considers the first stage decisions and a set of independent subproblems, each one representing a scenario. Recently it has been shown that adding some scenarios (or subproblems) to the master problem can lead to a reduction in the solution time (Crainic et al. 2021). In general, finding the best possible decomposition is an open problem.
6.2 Learning to warm-start decomposition-based optimization algorithms
Similar to the initialization of monolithic algorithms, the initialization of a decomposition-based algorithm can significantly affect its computational performance. However, predicting only the values of the variables is not enough since it does not account for the coordination aspect of a decomposition-based algorithm.
6.2.1 Initialization of distributed algorithms
For distributed-based algorithms, the coordination is achieved using Lagrangean multipliers. Therefore, an initialization requires an estimate of the values of the variables of the problem as well as the Lagrangean multipliers. This increases the complexity of the learning task compared to the initialization of monolithic solvers. This approach has been used to initialize the Lagrangean relaxation algorithm (a distributed decomposition-based algorithm) to solve network design and facility location problems (Demelas et al. 2023). This is achieved using an encoder–decoder architecture, where the input is the graph representation of the problem with features and the solution of the linear relaxation, and the output is an estimate of the multipliers. A similar approach has been developed for accelerating the alternating direction methods of multipliers (ADMM) using a recurrent neural network to predict the values of the Lagrangean multipliers and the complicating variables for the solution of optimal power flow problems (Biagioni et al. 2020).
6.2.2 Cutting plane-based hierarchical decomposition algorithms
Initialization is more challenging for cutting plane-based decomposition algorithms. In these methods, a decision-making problem is usually decomposed into a master problem, which contains all the integer variables and potentially some continuous, and a subproblem, which considers only continuous variables. The solution of the subproblem depends on the values of the variables of the master problem, which are called complicating variables. The master problem and subproblem are solved sequentially and are coordinated via cutting planes, i.e., linear inequalities that inform the master problem about the effect of the complicating variables on the subproblem. Usually, in the first iteration, the master problem is solved without cuts; the cuts are added iteratively based on the solution of the master problem. Adding an initial set of cuts can lead to better bounds and, thus, convergence in fewer iterations. However, similar to the cutting plane methods for branch and bround, determining which cuts to add as a warm start for decomposition-based methods is nontrivial. First, the number of potential cuts can be very large, and selecting which ones to add is a complex combinatorial problem. The second issue is related to the validity of the cuts for different instances. For cases where the parameters of the subproblem do not change, the cuts can be evaluated only once and added to the master problem every time a new instance must be solved. However, if the parameters of the subproblem change, then the previously evaluated cuts are not valid. Thus, one has to evaluate them, i.e., solve the subproblem, before adding them to the master problem.
In recent work, we have proposed several ML-based approaches to learn to initialize Benders decomposition by adding an initial set of cuts in the master problem for the solution of mixed integer model predictive control problems. For cases where the parameters of the subproblem do not change, and the complicating variables are continuous, we posed the cut selection problem as an algorithm configuration problem (Mitrai and Daoutidis 2024d). The number of cuts corresponds to the number of points used to discretize the domain of the complicating variables, and the performance function was the solution time, which was learned via active and supervised learning.
For the case where the parameters of the subproblem do not change, and the complicating variables are both discrete and continuous, the cut selection process has two steps. First, an ML-based branch and check Benders decomposition algorithm is used to obtain an approximate integer feasible solution and a set of integer feasible solutions, which are explored during branch and check (Mitrai and Daoutidis 2024a). The cuts related to these integer feasible solutions are added to the master problem, and then Benders decomposition is implemented to obtain the solution of the problem (Mitrai and Daoutidis 2024b). The integer feasible solutions guide the selection of the cuts to be added to the master problem. Finally, in the most generic case where the parameters of the subproblem change and the complicating variables are both continuous and discrete, a similar approach can be followed, where first, a set of integer feasible solutions is obtained by the ML-based branch and check. However, since the parameters of the subproblem change, the cuts related to these integer feasible solutions are first evaluated by solving the subproblem and then added to the master problem.
6.3 Learning to coordinate cutting plane-based decomposition algorithms
Once a decomposition is decided and an initialization is selected, the next step is the implementation of the algorithm. As discussed in Sections 6.2.2, for cutting plane-based algorithms, the steps are (1) solve the master problem and obtain the values of the complicating variables, (2) solve the subproblem, and (3) incorporate in the master problem information on the subproblems in the form of cuts. These three steps are repeated until the algorithm converges. Selecting which cutting planes to add during the solution process is an algorithm configuration problem.
In certain classes of problems, multiple subproblems can exist, and in each iteration, multiple cuts can be generated and added to the master problem. Although this strategy seems reasonable at first since a cut contains information about the subproblem, it can also significantly increase the computational complexity of the master problem. This has led to the development of ML-based architectures to determine which cuts to generate and add to the master problem during the solution. Two approaches have been developed to achieve this.
In the first, a classifier is used to predict whether a cut is valuable and should be added to the master problem. Different metrics are proposed to deem a cut valuable. The most commonly used one is the improvement in the bounds. This approach has been applied for the solution of two-stage stochastic optimization problems using Benders and generalized Benders decomposition (Jia and Shen 2021; Lee et al. 2020) as well as the solution of multistage stochastic optimization problems (Borozan et al. 2023). We note that a similar approach has been proposed for column generation where an ML model predicts if a column can lead to improvements in the bounds (Morabit et al. 2021).
The second approach exploits the iterative nature of decomposition-based algorithms and poses the cut selection problem as a reinforcement learning problem (Chi et al. 2022). Specifically, the solution of a decision-making problem with a decomposition-based algorithm is modeled as a Markov decision process, and the goal is to train a reinforcement learning agent which given a candidate set of cuts (obtained from the solution of the master problem) selects the cuts that should be added such that the number of steps (iterations) required to solve the problem is minimized.
7 Open problems and conclusions
In this section, we discuss open problems and new opportunities for applying ML to enhance the computational performance of algorithms for executing computational tasks in chemical engineering.
7.1 Application to general numerical tasks
The concepts discussed in this paper, as well as the ML-based solution strategies, can be applied to generic computational tasks that arise in chemical engineering. Typical examples include steady-state and dynamic process simulation. In such cases, one must solve a system of equations using an iterative numerical algorithm that has hyperparameters. Hence, algorithm selection and configuration approaches can be used to select the best simulation algorithm and tune it for the specific computational task. Some examples include the tuning of the successive over-relaxation algorithm for the solution of linear systems of equations (Khodak et al. 2023), selecting solvers for the solution of linear systems of equations (Bhowmick et al. 2009; Demmel et al. 2005; Dufrechou et al. 2021) and for the solution of initial value problems (Kamel et al. 1993). These results show that ML, in tandem with appropriate representations, might be able to accelerate process simulation, especially for large-scale and nonlinear systems, which are common in chemical engineering applications.
7.2 Can ML generate new insights?
All the aforementioned ML-based algorithm selection and configuration approaches answer the question of which algorithm to use and how to tune it. The next question is why is an algorithm (or configuration) able to solve a given problem instance efficiently? In other words, can ML generate new insights regarding the efficiency of a given algorithm for a class of decision-making problems? This question is relevant not only in the context of optimization algorithms but for the execution of numerical tasks in general (Kotthoff 2016). An approach to understanding the difficulty of solving a problem is to approximate the performance functions with interpretable models, such as decision trees, linear regression, and symbolic regression. However, these models usually have low accuracy, and more accurate models usually rely on deep learning (graph neural networks, feedforward neural networks, etc.), which is not inherently interpretable. This necessitates the utilization of explainable artificial intelligence tools for analyzing the outputs of deep learning models and potentially developing new interpretable deep learning architectures (Li et al. 2018; Rudin 2019). Overall, explaining and understanding the computational performance of an algorithm for a given decision-making problem is an open research problem.
7.3 Data availability
The data generation process is usually the most time consuming step in the development of an automated algorithm selection or configuration framework since a large number of decision-making problems must be solved, usually to optimality. Although parallel computing can be used to generate such datasets, this still requires significant computational resources. This computational cost can be potentially reduced using active, semi-, self-, and transfer learning approaches.
Active learning is a commonly used approach for cases where obtaining the labels of a data point is expensive (Settles 2009). This approach has been used to learn to initialize generalized Benders decomposition for the solution of mixed-integer model predictive control problems (Mitrai and Daoutidis 2024d). In this setting, a pool of data points is available, but only the features are known (e.g., some representation of the decision-making problems and the tuning) and obtaining the label requires the solution of the decision-making problem. The selection of the data point to be labeled is guided by the uncertainty of the prediction, i.e., we label the data point (combination of decision-making problem and tuning) for which the prediction of the solution time is the least certain. This approach still requires the labeling of data points.
Semi-supervised learning uses simultaneously labeled (usually few) and unlabeled data to train an ML model (Van Engelen and Hoos 2020). An example is wrapper methods where a first model is trained using the labeled data (initial training set). The model is subsequently used to general pseudo-labels for the unlabeled data which are added to the training data set and the model is retrained. Self-supervised learning uses the available unlabeled data to learn representations that can be useful for subsequent tasks such as classification and regression. Finally, transfer learning can be used to reduce the size of the training dataset by exploiting ML models trained for similar tasks (Weiss et al. 2016), such as branching in mixed integer linear and mixed integer nonlinear optimization problems.
7.4 Generative artificial intelligence
All the ML-based methods discussed so far are based on predictive machine learning/artificial intelligence techniques, namely supervised, unsupervised, and reinforcement learning. Recently generative artificial intelligence has made significant progress in developing AI-based systems capable of generating new content, such as video, image, and text. Given this remarkable progress, it is natural to wonder whether generative AI can be used to accelerate the solution of a decision-making problem.
The first application of generative AI is problem formulation from a natural language description of a decision-making problem. Preliminary results show that large language models (LLMs) can successfully formulate an optimization problem when the number of parameters, variables, and constraints is small (Ramamonjison et al. 2022, 2023). The natural language description has also been used to analyze infeasibility in a decision-making problem by making the LLM model interact with an optimization solver (Chen et al. 2023). LLMs have also been used to learn or discover new algorithms (Romera-Paredes et al. 2024) by coupling an LLM with a genetic programming framework, where the LLM provides new candidate algorithms which are evaluated and subsequently mutated by the LLM. The last application is that of generating optimization instances. This is achieved using the graph representation, with node and edge features, of a decision-making problem and developing a model that generates new graphs, i.e., optimization problems (Geng et al. 2024).
Overall, generative AI can be conceptually used for problem formulation, explaining the solution of a computational task, discovering new algorithms, and reformulating a decision-making problem. However, the capability of current transformer-based deep learning architectures (both ones depending on natural language and graph-based) to perform these tasks is an open problem.
Funding source: Division of Chemical, Bioengineering, Environmental, and Transport Systems (McKetta Department of Chemical Engineering for IM and NSF-CBET)
Award Identifier / Grant number: 2313289
-
Research ethics: Not applicable.
-
Informed consent: Not applicable.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Use of Large Language Models, AI and Machine Learning Tools: None declared.
-
Conflict of interest: The authors state no conflict of interest.
-
Research funding: McKetta Department of Chemical Engineering for IM and NSF-CBET (award no. 2313289) for PD.
-
Data availability: Not applicable.
References
Achterberg, T., Bixby, R.E., Gu, Z., Rothberg, E., and Weninger, D. (2020). Presolve reductions in mixed integer programming. INFORMS J. Comput. 32: 473–506, https://doi.org/10.1287/ijoc.2018.0857.Search in Google Scholar
Allen, J.A. and Minton, S. (1996). Selecting the right heuristic algorithm: runtime performance predictors. In: Advances in artifical intelligence: 11th biennial conference of the Canadian society for computational studies of intelligence, AI’96 Toronto, Ontario, Canada, May 21–24, 1996 proceedings 11. Springer, pp. 41–53.10.1007/3-540-61291-2_40Search in Google Scholar
Allen, R.C., Iseri, F., Demirhan, C.D., Pappas, I., and Pistikopoulos, E.N. (2023). Improvements for decomposition based methods utilized in the development of multi-scale energy systems. Comput. Chem. Eng. 170: 108135, https://doi.org/10.1016/j.compchemeng.2023.108135.Search in Google Scholar
Allman, A., Tang, W., and Daoutidis, P. (2019). DeCODe: a community-based algorithm for generating high-quality decompositions of optimization problems. Opt. Eng. 20: 1067–1084, https://doi.org/10.1007/s11081-019-09450-5.Search in Google Scholar
Alvarez, A.M., Louveaux, Q., and Wehenkel, L. (2017). A machine learning-based approximation of strong branching. INFORMS J. Comput. 29: 185–195, https://doi.org/10.1287/ijoc.2016.0723.Search in Google Scholar
Aykanat, C., Pinar, A., and Çatalyürek, Ü.V. (2004). Permuting sparse rectangular matrices into block-diagonal form. SIAM J. Sci. Comput. 25: 1860–1879, https://doi.org/10.1137/s1064827502401953.Search in Google Scholar
Baker, K. (2022). Emulating ac opf solvers with neural networks. IEEE Trans. Power Syst. 37: 4950–4953, https://doi.org/10.1109/tpwrs.2022.3195097.Search in Google Scholar
Balcan, M.-F., Dick, T., Sandholm, T., and Vitercik, E. (2024). Learning to branch: generalization guarantees and limits of data-independent discretization. J. ACM 71: 1–73, https://doi.org/10.1145/3637840.Search in Google Scholar
Baltean-Lugojan, R., Bonami, P., Misener, R., and Tramontani, A. (2019). Scoring positive semidefinite cutting planes for quadratic optimization via trained neural networks. preprint, Available at: http://www.optimization-online.org/DB_HTML/2018/11/6943.html.Search in Google Scholar
Bartz-Beielstein, T. and Markon, S. (2004). Tuning search algorithms for real-world applications: a regression tree based approach. In: Proceedings of the 2004 congress on evolutionary computation (IEEE cat. no. 04TH8753), Vol. 1. IEEE, pp. 1111–1118.10.1109/CEC.2004.1330986Search in Google Scholar
Basso, S., Ceselli, A., and Tettamanzi, A. (2020). Random sampling and machine learning to understand good decompositions. Ann. Oper. Res. 284: 501–526, https://doi.org/10.1007/s10479-018-3067-9.Search in Google Scholar
Bengio, Y., Lodi, A., and Prouvost, A. (2021). Machine learning for combinatorial optimization: a methodological tour d’horizon. Eur. J. Oper. Res. 290: 405–421, https://doi.org/10.1016/j.ejor.2020.07.063.Search in Google Scholar
Bergner, M., Caprara, A., Ceselli, A., Furini, F., Lübbecke, M.E., Malaguti, E., and Traversi, E. (2015). Automatic Dantzig-Wolfe reformulation of mixed integer programs. Math. Prog. 149: 391–424, https://doi.org/10.1007/s10107-014-0761-5.Search in Google Scholar
Berthold, T., Francobaldi, M., and Hendel, G. (2022). Learning to use local cuts. arXiv preprint arXiv:2206.11618.Search in Google Scholar
Bertsimas, D. and Stellato, B. (2022). Online mixed-integer optimization in milliseconds. INFORMS J. Comput. 34: 2229–2248, https://doi.org/10.1287/ijoc.2022.1181.Search in Google Scholar
Bhosekar, A. and Ierapetritou, M.G. (2018). Advances in surrogate based modeling, feasibility analysis, and optimization: a review. Comput. Chem. Eng. 108: 250–267, https://doi.org/10.1016/j.compchemeng.2017.09.017.Search in Google Scholar
Bhowmick, S., Toth, B., and Raghavan, P. (2009). Towards low-cost, high-accuracy classifiers for linear solver selection. In: Computational science–ICCS 2009: 9th international conference Baton Rouge, LA, USA, May 25–27, 2009 proceedings, part I. Springer, pp. 463–472.10.1007/978-3-642-01970-8_45Search in Google Scholar
Biagioni, D., Graf, P., Zhang, X., Zamzam, A.S., Baker, K., and King, J. (2020). Learning-accelerated ADMM for distributed DC optimal power flow. IEEE Control Syst. Lett. 6: 1–6, https://doi.org/10.1109/lcsys.2020.3044839.Search in Google Scholar
Biegler, L.T. (2024). Multi-level optimization strategies for large-scale nonlinear process systems. Comput. Chem. Eng. 185: 108657, https://doi.org/10.1016/j.compchemeng.2024.108657.Search in Google Scholar
Bonami, P., Lodi, A., and Zarpellon, G. (2022). A classifier to decide on the linearization of mixed-integer quadratic problems in CPLEX. Oper. Res. 70: 3303–3320, https://doi.org/10.1287/opre.2022.2267.Search in Google Scholar
Borozan, S., Giannelos, S., Falugi, P., Moreira, A., and Strbac, G. (2023). A machine learning-enhanced benders decomposition approach to solve the transmission expansion planning problem under uncertainty. arXiv preprint arXiv:2304.07534.10.1016/j.epsr.2024.110985Search in Google Scholar
Boukouvala, F., Misener, R., and Floudas, C.A. (2016). Global optimization advances in mixed-integer nonlinear programming, MINLP, and constrained derivative-free optimization, CDFO. Eur. J. Oper. Res. 252: 701–727, https://doi.org/10.1016/j.ejor.2015.12.018.Search in Google Scholar
Bradley, W., Kim, J., Kilwein, Z., Blakely, L., Eydenberg, M., Jalvin, J., Laird, C., and Boukouvala, F. (2022). Perspectives on the integration between first-principles and data-driven modeling. Comput. Chem. Eng.: 107898, https://doi.org/10.1016/j.compchemeng.2022.107898.Search in Google Scholar
Bronstein, M.M., Bruna, J., LeCun, Y., Szlam, A., and Vandergheynst, P. (2017). Geometric deep learning: going beyond euclidean data. IEEE Signal Process. Mag. 34: 18–42, https://doi.org/10.1109/msp.2017.2693418.Search in Google Scholar
Bronstein, M.M., Bruna, J., Cohen, T., and Veličković, P. (2021). Geometric deep learning: grids, groups, graphs, geodesics, and gauges. arXiv preprint arXiv:2104.13478.Search in Google Scholar
Cauligi, A., Culbertson, P., Schmerling, E., Schwager, M., Stellato, B., and Pavone, M. (2021). Coco: online mixed-integer control via supervised learning. IEEE Robot. Autom. Lett. 7: 1447–1454, https://doi.org/10.1109/lra.2021.3135931.Search in Google Scholar
Cauligi, A., Chakrabarty, A., Di Cairano, S., and Quirynen, R. (2022). PRISM: recurrent neural networks and presolve methods for fast mixed-integer optimal control. In: Learning for dynamics and control conference. PMLR, pp. 34–46.Search in Google Scholar
Cengil, F., Nagarajan, H., Bent, R., Eksioglu, S., and Eksioglu, B. (2022). Learning to accelerate globally optimal solutions to the AC optimal power flow problem. Electr. Power Syst. Res. 212: 108275, https://doi.org/10.1016/j.epsr.2022.108275.Search in Google Scholar
Chen, W., Shao, Z., Wang, K., Chen, X., and Biegler, L.T. (2011). Random sampling-based automatic parameter tuning for nonlinear programming solvers. Ind. Eng. Chem. Res. 50: 3907–3918, https://doi.org/10.1021/ie100826y.Search in Google Scholar
Chen, Z., Liu, J., Wang, X., Lu, J., and Yin, W. (2022a). On representing linear programs by graph neural networks. arXiv preprint arXiv:2209.12288.Search in Google Scholar
Chen, Z., Liu, J., Wang, X., Lu, J., and Yin, W. (2022b). On representing mixed-integer linear programs by graph neural networks. arXiv preprint arXiv:2210.10759.Search in Google Scholar
Chen, H., Constante-Flores, G.E., and Li, C. (2023). Diagnosing infeasible optimization problems using large language models. arXiv preprint arXiv:2308.12923.Search in Google Scholar
Chen, H., Constant-Flores, G.E., and Li, C. (2024). Diagnosing infeasible optimization problems using large language models. Inf. Sys. Oper. Res. 62: 573–587.10.1080/03155986.2024.2385189Search in Google Scholar
Chi, C., Aboussalah, A., Khalil, E., Wang, J., and Sherkat-Masoumi, Z. (2022). A deep reinforcement learning framework for column generation. Adv. Neural Inf. Process. Syst. 35: 9633–9644.Search in Google Scholar
Christofides, P.D., Scattolini, R., Muñoz de la Peña, D., and Liu, J. (2013). Distributed model predictive control: a tutorial review and future research directions. Comput. Chem. Eng. 51: 21–41, https://doi.org/10.1016/j.compchemeng.2012.05.011.Search in Google Scholar
Conejo, A.J., Castillo, E., Minguez, R., and Garcia-Bertrand, R. (2006). Decomposition techniques in mathematical programming: engineering and science applications. Springer Science & Business Media, Berlin.Search in Google Scholar
Cozad, A., Sahinidis, N.V., and Miller, D.C. (2014). Learning surrogate models for simulation-based optimization. AIChE J. 60: 2211–2227, https://doi.org/10.1002/aic.14418.Search in Google Scholar
Crainic, T.G., Hewitt, M., Maggioni, F., and Rei, W. (2021). Partial benders decomposition: general methodology and application to stochastic network design. Transp. Sci. 55: 414–435, https://doi.org/10.1287/trsc.2020.1022.Search in Google Scholar
Daoutidis, P., Lee, J.H., Harjunkoski, I., Skogestad, S., Baldea, M., and Georgakis, C. (2018). Integrating operations and control: a perspective and roadmap for future research. Comput. Chem. Eng. 115: 179–184, https://doi.org/10.1016/j.compchemeng.2018.04.011.Search in Google Scholar
Daoutidis, P., Lee, J.H., Rangarajan, S., Chiang, L., Gopaluni, B., Schweidtmann, A.M., Harjunkoski, I., Mercangöz, M., Mesbah, A., Boukouvala, F., et al.. (2023a). Machine learning in process systems engineering: challenges and opportunities. Comput. Chem. Eng.: 108523, https://doi.org/10.1016/j.compchemeng.2023.108523.Search in Google Scholar
Daoutidis, P., Megan, L., and Tang, W. (2023b). The future of control of process systems. Comput. Chem. Eng. 178: 108365, https://doi.org/10.1016/j.compchemeng.2023.108365.Search in Google Scholar
Das Gupta, S., Van Parys, B.P., and Ryu, E.K. (2024). Branch-and-bound performance estimation programming: a unified methodology for constructing optimal optimization methods. Math. Program. 204: 567–639, https://doi.org/10.1007/s10107-023-01973-1.Search in Google Scholar
Demelas, F., Roux, J.L., Lacroix, M., and Parmentier, A. (2023). Predicting accurate Lagrangian multipliers for mixed integer linear programs. arXiv preprint arXiv:2310.14659.Search in Google Scholar
Demmel, J., Dongarra, J., Eijkhout, V., Fuentes, E., Petitet, A., Vuduc, R., Whaley, R.C., and Yelick, K. (2005). Self-adapting linear algebra algorithms and software. Proc. IEEE 93: 293–312, https://doi.org/10.1109/jproc.2004.840848.Search in Google Scholar
Dey, S.S. and Molinaro, M. (2018). Theoretical challenges towards cutting-plane selection. Math. Program. 170: 237–266, https://doi.org/10.1007/s10107-018-1302-4.Search in Google Scholar
Di Liberto, G., Kadioglu, S., Leo, K., and Malitsky, Y. (2016). Dash: dynamic approach for switching heuristics. Eur. J. Oper. Res. 248: 943–953, https://doi.org/10.1016/j.ejor.2015.08.018.Search in Google Scholar
Dietrich, F., Thiem, T.N., and Kevrekidis, I.G. (2020). On the Koopman operator of algorithms. SIAM J. Appl. Dyn. Syst. 19: 860–885, https://doi.org/10.1137/19m1277059.Search in Google Scholar
Ding, J.-Y., Zhang, C., Shen, L., Li, S., Wang, B., Xu, Y., and Song, L. (2020). Accelerating primal solution findings for mixed integer programs based on solution prediction. Proc. AAAI Conf. Artif. Intell. 34: 1452–1459, https://doi.org/10.1609/aaai.v34i02.5503.Search in Google Scholar
Doncevic, D.T., Mitsos, A., Guo, Y., Li, Q., Dietrich, F., Dahmen, M., and Kevrekidis, I.G. (2024). A recursively recurrent neural network (r2n2) architecture for learning iterative algorithms. SIAM J. Sci. Comput. 46: A719–A743, https://doi.org/10.1137/22m1535310.Search in Google Scholar
Drori, Y. and Teboulle, M. (2014). Performance of first-order methods for smooth convex minimization: a novel approach. Math. Program. 145: 451–482, https://doi.org/10.1007/s10107-013-0653-0.Search in Google Scholar
Dufrechou, E., Ezzatti, P., Freire, M., and Quintana-Ortí, E.S. (2021). Machine learning for optimal selection of sparse triangular system solvers on GPUs. J. Parallel Distr. Comput. 158: 47–55, https://doi.org/10.1016/j.jpdc.2021.07.013.Search in Google Scholar
Eggensperger, K., Lindauer, M., and Hutter, F. (2017). Neural networks for predicting algorithm runtime distributions. arXiv preprint arXiv:1709.07615.10.24963/ijcai.2018/200Search in Google Scholar
Eggensperger, K., Lindauer, M., and Hutter, F. (2019). Pitfalls and best practices in algorithm configuration. J. Artif. Intell. Res. 64: 861–893, https://doi.org/10.1613/jair.1.11420.Search in Google Scholar
Ellis, M., Durand, H., and Christofides, P.D. (2014). A tutorial review of economic model predictive control methods. J. Process Control 24: 1156–1178, https://doi.org/10.1016/j.jprocont.2014.03.010.Search in Google Scholar
Etheve, M., Alès, Z., Bissuel, C., Juan, O., and Kedad-Sidhoum, S. (2020). Reinforcement learning for variable selection in a branch and bound algorithm. In: International conference on integration of constraint programming, artificial intelligence, and operations research. Springer, pp. 176–185.10.1007/978-3-030-58942-4_12Search in Google Scholar
Ferris, M.C. and Horn, J.D. (1998). Partitioning mathematical programs for parallel solution. Math. Program. 80: 35–61, https://doi.org/10.1007/bf01582130.Search in Google Scholar
Gasse, M., Chételat, D., Ferroni, N., Charlin, L., and Lodi, A. (2019). Exact combinatorial optimization with graph convolutional neural networks. Adv. Neural Inf. Process. Syst. 32.Search in Google Scholar
Geng, Z., Li, X., Wang, J., Li, X., Zhang, Y., and Wu, F. (2024). A deep instance generative framework for milp solvers under limited data availability. Adv. Neural Inf. Process. Syst. 36.Search in Google Scholar
Ghaddar, B., Gómez-Casares, I., González-Díaz, J., González-Rodríguez, B., Pateiro-López, B., and Rodríguez-Ballesteros, S. (2023). Learning for spatial branching: an algorithm selection approach. INFORMS J. Comput. 35: 1024–1043, https://doi.org/10.1287/ijoc.2022.0090.Search in Google Scholar
Grossmann, I.E. (2012). Advances in mathematical programming models for enterprise-wide optimization. Comput. Chem. Eng. 47: 2–18, https://doi.org/10.1016/j.compchemeng.2012.06.038.Search in Google Scholar
Grossmann, I.E., Apap, R.M., Calfa, B.A., García-Herreros, P., and Zhang, Q. (2016). Recent advances in mathematical programming techniques for the optimization of process systems under uncertainty. Comput. Chem. Eng. 91: 3–14, https://doi.org/10.1016/j.compchemeng.2016.03.002.Search in Google Scholar
Guerri, A. and Milano, M. (2004). Learning techniques for automatic algorithm portfolio selection. ECAI 16: 475.Search in Google Scholar
Gupta, P., Gasse, M., Khalil, E., Mudigonda, P., Lodi, A., and Bengio, Y. (2020). Hybrid models for learning to branch. Adv. Neural Inf. Process. Syst. 33: 18087–18097.Search in Google Scholar
Gupta, P., Khalil, E.B., Chetélat, D., Gasse, M., Bengio, Y., Lodi, A., and Kumar, M.P. (2022). Lookback for learning to branch. arXiv preprint arXiv:2206.14987.Search in Google Scholar
Hall, N.G. and Posner, M.E. (2007). Performance prediction and preselection for optimization and heuristic solution procedures. Oper. Res. 55: 703–716, https://doi.org/10.1287/opre.1070.0398.Search in Google Scholar
Hanselman, C.L. and Gounaris, C.E. (2016). A mathematical optimization framework for the design of nanopatterned surfaces. AIChE J. 62: 3250–3263, https://doi.org/10.1002/aic.15359.Search in Google Scholar
He, H., Daume, H.III, and Eisner, J.M. (2014). Learning to search in branch and bound algorithms. Adv. Neural Inf. Process. Syst. 27.Search in Google Scholar
Hertneck, M., Köhler, J., Trimpe, S., and Allgöwer, F. (2018). Learning an approximate model predictive controller with guarantees. IEEE Control Syst. Lett. 2: 543–548, https://doi.org/10.1109/lcsys.2018.2843682.Search in Google Scholar
Huang, L., Jia, J., Yu, B., Chun, B.-G., Maniatis, P., and Naik, M. (2010). Predicting execution time of computer programs using sparse polynomial regression. Adv. Neural Inf. Process. Syst. 23.Search in Google Scholar
Huang, Z., Chen, W., Zhang, W., Shi, C., Liu, F., Zhen, H.-L., Yuan, M., Hao, J., Yu, Y., and Wang, J. (2022). Branch ranking for efficient mixed-integer programming via offline ranking-based policy learning. In: Joint European conference on machine learning and knowledge discovery in databases. Springer, pp. 377–392.10.1007/978-3-031-26419-1_23Search in Google Scholar
Hutter, F., Hamadi, Y., Hoos, H.H., and Leyton-Brown, K. (2006). Performance prediction and automated tuning of randomized and parametric algorithms. In: International conference on principles and practice of constraint programming. Springer, pp. 213–228.10.1007/11889205_17Search in Google Scholar
Hutter, F., Hoos, H.H., Leyton-Brown, K., and Stützle, T. (2009). ParamILS: an automatic algorithm configuration framework. J. Artif. Intell. Res. 36: 267–306, https://doi.org/10.1613/jair.2861.Search in Google Scholar
Hutter, F., Hoos, H.H., and Leyton-Brown, K. (2010). Automated configuration of mixed integer programming solvers. In: International conference on integration of artificial intelligence (AI) and operations research (OR) techniques in constraint programming. Springer, pp. 186–202.10.1007/978-3-642-13520-0_23Search in Google Scholar
Hutter, F., Hoos, H.H., and Leyton-Brown, K. (2011). Sequential model-based optimization for general algorithm configuration. In: International conference on learning and intelligent optimization. Springer, pp. 507–523.10.1007/978-3-642-25566-3_40Search in Google Scholar
Hutter, F., Xu, L., Hoos, H.H., and Leyton-Brown, K. (2014). Algorithm runtime prediction: methods & evaluation. Artif. Intell. 206: 79–111, https://doi.org/10.1016/j.artint.2013.10.003.Search in Google Scholar
Iommazzo, G., d’Ambrosio, C., Frangioni, A., and Liberti, L. (2020). Learning to configure mathematical programming solvers by mathematical programming. In: International conference on learning and intelligent optimization. Springer, pp. 377–389.10.1007/978-3-030-53552-0_34Search in Google Scholar
Jalving, J., Shin, S., and Zavala, V.M. (2022). A graph-based modeling abstraction for optimization: concepts and implementation in plasmo.jl. Math. Program. Comput. 14: 699–747, https://doi.org/10.1007/s12532-022-00223-3.Search in Google Scholar
Jia, H. and Shen, S. (2021). Benders cut classification via support vector machines for solving two-stage stochastic programs. INFORMS J. Optim. 3: 278–297, https://doi.org/10.1287/ijoo.2019.0050.Search in Google Scholar
Jogwar, S.S. and Daoutidis, P. (2017). Community-based synthesis of distributed control architectures for integrated process networks. Chem. Eng. Sci. 172: 434–443, https://doi.org/10.1016/j.ces.2017.06.043.Search in Google Scholar
Kamel, M.S., Enright, W.H., and Ma, K. (1993). ODEXPERT: an expert system to select numerical solvers for initial value ODE systems. ACM Trans. Math. Software 19: 44–62, https://doi.org/10.1145/151271.151275.Search in Google Scholar
Kerschke, P., Hoos, H.H., Neumann, F., and Trautmann, H. (2019). Automated algorithm selection: survey and perspectives. Evol. Comput. 27: 3–45, https://doi.org/10.1162/evco_a_00242.Search in Google Scholar PubMed
Khalil, E., Le Bodic, P., Song, L., Nemhauser, G., and Dilkina, B. (2016). Learning to branch in mixed integer programming. Proc. AAAI Conf. Artif. Intell. 30, https://doi.org/10.1609/aaai.v30i1.10080.Search in Google Scholar
Khaniyev, T., Elhedhli, S., and Erenay, F.S. (2018). Structure detection in mixed-integer programs. INFORMS J. Comput. 30: 570–587, https://doi.org/10.1287/ijoc.2017.0797.Search in Google Scholar
Khodak, M., Chow, E., Balcan, M.-F., and Talwalkar, A. (2023). Learning to relax: setting solver parameters across a sequence of linear system instances. arXiv preprint arXiv:2310.02246.Search in Google Scholar
Kim, B. and Maravelias, C.T. (2022). Supervised machine learning for understanding and improving the computational performance of chemical production scheduling mip models. Ind. Eng. Chem. Res. 61: 17124–17136, https://doi.org/10.1021/acs.iecr.2c02734.Search in Google Scholar
Klaučo, M., Kalúz, M., and Kvasnica, M. (2019). Machine learning-based warm starting of active set methods in embedded model predictive control. Eng. Appl. Artif. Intell. 77: 1–8, https://doi.org/10.1016/j.engappai.2018.09.014.Search in Google Scholar
Kolodner, J.L. (1992). An introduction to case-based reasoning. Artif. Intell. Rev. 6: 3–34, https://doi.org/10.1007/bf00155578.Search in Google Scholar
Kotary, J., Fioretto, F., Van Hentenryck, P., and Wilder, B. (2021). End-to-end constrained optimization learning: a survey. arXiv preprint arXiv:2103.16378, https://doi.org/10.24963/ijcai.2021/610.Search in Google Scholar
Kotthoff, L. (2016). Algorithm selection for combinatorial search problems: a survey. In: Data mining and constraint programming. Springer, Switzerland, pp. 149–190.10.1007/978-3-319-50137-6_7Search in Google Scholar
Kruber, M., Lübbecke, M.E., and Parmentier, A. (2017). Learning when to use a decomposition. In: International conference on AI and OR techniques in constraint programming for combinatorial optimization problems. Springer, pp. 202–210.10.1007/978-3-319-59776-8_16Search in Google Scholar
Kumar, P., Rawlings, J.B., and Wright, S.J. (2021). Industrial, large-scale model predictive control with structured neural networks. Comput. Chem. Eng. 150: 107291, https://doi.org/10.1016/j.compchemeng.2021.107291.Search in Google Scholar
Labassi, A.G., Chételat, D., and Lodi, A. (2022). Learning to compare nodes in branch and bound with graph neural networks. Adv. Neural Inf. Process. Syst. 35: 32000–32010.Search in Google Scholar
Lee, M., Ma, N., Yu, G., and Dai, H. (2020). Accelerating generalized benders decomposition for wireless resource allocation. IEEE Wireless Commun. 20: 1233–1247, https://doi.org/10.1109/twc.2020.3031920.Search in Google Scholar
Leyton-Brown, K., Nudelman, E., and Shoham, Y. (2009). Empirical hardness models: methodology and a case study on combinatorial auctions. J. ACM 56: 1–52, https://doi.org/10.1145/1538902.1538906.Search in Google Scholar
Li, O., Liu, H., Chen, C., and Rudin, C. (2018). Deep learning for case-based reasoning through prototypes: a neural network that explains its predictions. Proc. AAAI Conf. Artif. Intell. 32, https://doi.org/10.1609/aaai.v32i1.11771.Search in Google Scholar
Li, X., Qu, Q., Zhu, F., Zeng, J., Yuan, M., Mao, K., and Wang, J. (2022). Learning to reformulate for linear programming. arXiv preprint arXiv:2201.06216.Search in Google Scholar
Liberti, L. and Pantelides, C.C. (2006). An exact reformulation algorithm for large nonconvex NLPs involving bilinear terms. J. Glob. Optim. 36: 161–189, https://doi.org/10.1007/s10898-006-9005-4.Search in Google Scholar
Liu, J., Ploskas, N., and Sahinidis, N.V. (2019). Tuning BARON using derivative-free optimization algorithms. J. Glob. Optim. 74: 611–637, https://doi.org/10.1007/s10898-018-0640-3.Search in Google Scholar
Liu, D., Fischetti, M., and Lodi, A. (2022). Learning to search in local branching. Proc. AAAI Conf. Artif. Intell. 36: 3796–3803, https://doi.org/10.1609/aaai.v36i4.20294.Search in Google Scholar
Lodi, A. and Zarpellon, G. (2017). On learning and branching: a survey. Top 25: 207–236, https://doi.org/10.1007/s11750-017-0451-6.Search in Google Scholar
Markót, M.C. and Schichl, H. (2011). Comparison and automated selection of local optimization solvers for interval global optimization methods. SIAM J. Optim. 21: 1371–1391, https://doi.org/10.1137/100793530.Search in Google Scholar
Marousi, A. and Kokossis, A. (2022). On the acceleration of global optimization algorithms by coupling cutting plane decomposition algorithms with machine learning and advanced data analytics. Comput. Chem. Eng. 163: 107820, https://doi.org/10.1016/j.compchemeng.2022.107820.Search in Google Scholar
Masti, D., Pippia, T., Bemporad, A., and De Schutter, B. (2020). Learning approximate semi-explicit hybrid MPC with an application to microgrids. IFAC-PapersOnLine 53: 5207–5212, https://doi.org/10.1016/j.ifacol.2020.12.1192.Search in Google Scholar
McAllister, R.D. and Rawlings, J.B. (2022). Advances in mixed-integer model predictive control. In: 2022 American control conference (ACC). IEEE, pp. 364–369.10.23919/ACC53348.2022.9867869Search in Google Scholar
Mesbah, A. (2016). Stochastic model predictive control: an overview and perspectives for future research. IEEE Control Syst. Mag. 36: 30–44.10.1109/MCS.2016.2602087Search in Google Scholar
Michelena, N.F. and Papalambros, P.Y. (1997). A hypergraph framework for optimal model-based decomposition of design problems. Comput. Optim. Appl. 8: 173–196, https://doi.org/10.1023/a:1008673321406.10.1023/A:1008673321406Search in Google Scholar
Misener, R. and Biegler, L. (2023). Formulating data-driven surrogate models for process optimization. Comput. Chem. Eng. 179: 108411, https://doi.org/10.1016/j.compchemeng.2023.108411.Search in Google Scholar
Misra, S., Roald, L., and Ng, Y. (2022). Learning for constrained optimization: identifying optimal active constraint sets. INFORMS J. Comput. 34: 463–480, https://doi.org/10.1287/ijoc.2020.1037.Search in Google Scholar
Mitrai, I. and Daoutidis, P. (2020). Decomposition of integrated scheduling and dynamic optimization problems using community detection. J. Process Control 90: 63–74, https://doi.org/10.1016/j.jprocont.2020.04.003.Search in Google Scholar
Mitrai, I. and Daoutidis, P. (2021). Efficient solution of enterprise-wide optimization problems using nested stochastic blockmodeling. Ind. Eng. Chem. Res. 60: 14476–14494, https://doi.org/10.1021/acs.iecr.1c01570.Search in Google Scholar
Mitrai, I. and Daoutidis, P. (2024a). Computationally efficient solution of mixed integer model predictive control problems via machine learning aided benders decomposition. J. Process Control 137: 103207, https://doi.org/10.1016/j.jprocont.2024.103207.Search in Google Scholar
Mitrai, I. and Daoutidis, P. (2024b). Learning to recycle benders cuts for mixed integer model predictive control. In: Computer aided chemical engineering, Vol. 53. The Netherlands: Elsevier, pp. 1663–1668.10.1016/B978-0-443-28824-1.50278-7Search in Google Scholar
Mitrai, I. and Daoutidis, P. (2024c). Taking the human out of decomposition-based optimization via artificial intelligence, part I: learning when to decompose. Comput. Chem. Eng. 186: 108688, https://doi.org/10.1016/j.compchemeng.2024.108688.Search in Google Scholar
Mitrai, I. and Daoutidis, P. (2024d). Taking the human out of decomposition-based optimization via artificial intelligence, part II: learning to initialize. Comput. Chem. Eng. 186: 108686, https://doi.org/10.1016/j.compchemeng.2024.108686.Search in Google Scholar
Mitrai, I., Tang, W., and Daoutidis, P. (2022). Stochastic blockmodeling for learning the structure of optimization problems. AIChE J. 68: e17415, https://doi.org/10.1002/aic.17415.Search in Google Scholar
Mitsos, A., Najman, J., and Kevrekidis, I.G. (2018). Optimal deterministic algorithm generation. J. Glob. Optim. 71: 891–913, https://doi.org/10.1007/s10898-018-0611-8.Search in Google Scholar
Moharir, M., Kang, L., Daoutidis, P., and Almansoori, A. (2017). Graph representation and decomposition of ODE/hyperbolic PDE systems. Comput. Chem. Eng. 106: 532–543, https://doi.org/10.1016/j.compchemeng.2017.07.005.Search in Google Scholar
Morabit, M., Desaulniers, G., and Lodi, A. (2021). Machine-learning–based column selection for column generation. Transp. Sci. 55: 815–831, https://doi.org/10.1287/trsc.2021.1045.Search in Google Scholar
Nair, V., Bartunov, S., Gimeno, F., von Glehn, I., Lichocki, P., Lobov, I., O’Donoghue, B., Sonnerat, N., Tjandraatmadja, C., Wang, P., et al.. (2020). Solving mixed integer programs using neural networks. arXiv preprint arXiv:2012.13349.Search in Google Scholar
Nannicini, G., Belotti, P., Lee, J., Linderoth, J., Margot, F., and Wächter, A. (2011). A probing algorithm for MINLP with failure prediction by SVM. In: Integration of AI and OR techniques in constraint programming for combinatorial optimization problems: 8th international conference, CPAIOR 2011, Berlin, Germany, May 23–27, 2011. Proceedings 8. Springer, pp. 154–169.10.1007/978-3-642-21311-3_15Search in Google Scholar
National Academies of Sciences, Engineering, and Medicine (2022). New Directions for Chemical Engineering. Washington D.C.: National Academies of Sciences, Engineering, and Medicine.Search in Google Scholar
Park, S. and Van Hentenryck, P. (2023). Self-supervised primal-dual learning for constrained optimization. Proc. AAAI Conf. Artif. Intell. 37: 4052–4060, https://doi.org/10.1609/aaai.v37i4.25520.Search in Google Scholar
Parsonson, C.W., Laterre, A., and Barrett, T.D. (2023). Reinforcement learning for branch-and-bound optimisation using retrospective trajectories. Proc. AAAI Conf. Artif. Intell. 37: 4061–4069, https://doi.org/10.1609/aaai.v37i4.25521.Search in Google Scholar
Paulson, J.A. and Mesbah, A. (2020). Approximate closed-loop robust model predictive control with guaranteed stability and constraint satisfaction. IEEE Control Syst. Lett. 4: 719–724, https://doi.org/10.1109/lcsys.2020.2980479.Search in Google Scholar
Paulus, M.B., Zarpellon, G., Krause, A., Charlin, L., and Maddison, C. (2022). Learning to cut by looking ahead: cutting plane selection via imitation learning. In: International conference on machine learning. PMLR, pp. 17584–17600.Search in Google Scholar
Pihera, J. and Musliu, N. (2014). Application of machine learning to algorithm selection for TSP. In: 2014 IEEE 26th international conference on tools with artificial intelligence. IEEE, pp. 47–54.10.1109/ICTAI.2014.18Search in Google Scholar
Pistikopoulos, E.N., Barbosa-Povoa, A., Lee, J.H., Misener, R., Mitsos, A., Reklaitis, G.V., Venkatasubramanian, V., You, F., and Gani, R. (2021). Process systems engineering–the generation next? Comput. Chem. Eng. 147: 107252, https://doi.org/10.1016/j.compchemeng.2021.107252.Search in Google Scholar
Qian, C., Chételat, D., and Morris, C. (2024). Exploring the power of graph neural networks in solving linear optimization problems. In: International conference on artificial intelligence and statistics. PMLR, pp. 1432–1440.Search in Google Scholar
Raghunathan, A.U. and Biegler, L.T. (2003). Mathematical programs with equilibrium constraints (MPECs) in process engineering. Comput. Chem. Eng. 27: 1381–1392, https://doi.org/10.1016/s0098-1354(03)00092-9.Search in Google Scholar
Ramamonjison, R., Li, H., Yu, T.T., He, S., Rengan, V., Banitalebi-Dehkordi, A., Zhou, Z., and Zhang, Y. (2022). Augmenting operations research with auto-formulation of optimization models from problem descriptions. arXiv preprint arXiv:2209.15565.10.18653/v1/2022.emnlp-industry.4Search in Google Scholar
Ramamonjison, R., Yu, T., Li, R., Li, H., Carenini, G., Ghaddar, B., He, S., Mostajabdaveh, M., Banitalebi-Dehkordi, A., Zhou, Z., et al.. (2023). Nl4opt competition: formulating optimization problems based on their natural language descriptions. In: NeurIPS 2022 competition track. PMLR, pp. 189–203.Search in Google Scholar
Rice, J.R. (1976). The algorithm selection problem. Adv. Comput. 15: 65–118, https://doi.org/10.1016/s0065-2458(08)60520-3.Search in Google Scholar
Rio-Chanona, E.A.D., Fiorelli, F., and Vassiliadis, V.S. (2016). Automated structure detection for distributed process optimization. Comput. Chem. Eng. 89: 135–148.10.1016/j.compchemeng.2016.03.014Search in Google Scholar
Romera-Paredes, B., Barekatain, M., Novikov, A., Balog, M., Kumar, M.P., Dupont, E., Ruiz, F.J., Ellenberg, J.S., Wang, P., Fawzi, O., et al.. (2024). Mathematical discoveries from program search with large language models. Nature 625: 468–475, https://doi.org/10.1038/s41586-023-06924-6.Search in Google Scholar PubMed PubMed Central
Rudin, C. (2019). Stop explaining black box machine learning models for high stakes decisions and use interpretable models instead. Nat. Mach. Intell. 1: 206–215, https://doi.org/10.1038/s42256-019-0048-x.Search in Google Scholar PubMed PubMed Central
Russo, L., Nair, S.H., Glielmo, L., and Borrelli, F. (2023). Learning for online mixed-integer model predictive control with parametric optimality certificates. IEEE Control Syst. Lett. 7: 2215–2220, https://doi.org/10.1109/lcsys.2023.3285778.Search in Google Scholar
Sabharwal, A., Samulowitz, H., and Reddy, C. (2012). Guiding combinatorial optimization with UCT. In: Integration of AI and OR Techniques in contraint programming for combinatorial optimzation problems: 9th international conference, CPAIOR 2012, Nantes, France, May 28–June 1, 2012. Proceedings 9. Springer, pp. 356–361.10.1007/978-3-642-29828-8_23Search in Google Scholar
Sambharya, R. and Stellato, B. (2024). Data-driven performance guarantees for classical and learned optimizers. arXiv preprint arXiv:2404.13831.Search in Google Scholar
Sansana, J., Joswiak, M.N., Castillo, I., Wang, Z., Rendall, R., Chiang, L.H., and Reis, M.S. (2021). Recent trends on hybrid modeling for industry 4.0. Comput. Chem. Eng. 151: 107365, https://doi.org/10.1016/j.compchemeng.2021.107365.Search in Google Scholar
Scavuzzo, L., Chen, F., Chételat, D., Gasse, M., Lodi, A., Yorke-Smith, N., and Aardal, K. (2022). Learning to branch with tree mdps. Adv. Neural Inf. Process. Syst. 35: 18514–18526.Search in Google Scholar
Schede, E., Brandt, J., Tornede, A., Wever, M., Bengs, V., Hüllermeier, E., and Tierney, K. (2022). A survey of methods for automated algorithm configuration. J. Artif. Intell. Res. 75: 425–487, https://doi.org/10.1613/jair.1.13676.Search in Google Scholar
Schweidtmann, A.M., Esche, E., Fischer, A., Kloft, M., Repke, J.-U., Sager, S., and Mitsos, A. (2021). Machine learning in chemical engineering: a perspective. Chem. Ing. Tech. 93: 2029–2039, https://doi.org/10.1002/cite.202100083.Search in Google Scholar
Settles, B. (2009). Active learning literature survey. Computer Sciences Technical Report 1648. University of Wisconsin–Madison.Search in Google Scholar
Shin, J., Badgwell, T.A., Liu, K.-H., and Lee, J.H. (2019). Reinforcement learning–overview of recent progress and implications for process control. Comput. Chem. Eng. 127: 282–294, https://doi.org/10.1016/j.compchemeng.2019.05.029.Search in Google Scholar
Shin, S., Coffrin, C., Sundar, K., and Zavala, V.M. (2021). Graph-based modeling and decomposition of energy infrastructures. IFAC-PapersOnLine 54: 693–698, https://doi.org/10.1016/j.ifacol.2021.08.322.Search in Google Scholar
Smith-Miles, K. and van Hemert, J. (2011). Discovering the suitability of optimisation algorithms by learning from evolved instances. Ann. Math. Artif. Intell. 61: 87–104, https://doi.org/10.1007/s10472-011-9230-5.Search in Google Scholar
Smith-Miles, K. and Lopes, L. (2012). Measuring instance difficulty for combinatorial optimization problems. Comput. Oper. Res. 39: 875–889, https://doi.org/10.1016/j.cor.2011.07.006.Search in Google Scholar
Tang, W. and Daoutidis, P. (2022). Data-driven control: overview and perspectives. In: 2022 American control conference (ACC). IEEE, pp. 1048–1064.10.23919/ACC53348.2022.9867266Search in Google Scholar
Tang, W., Allman, A., Pourkargar, D.B., and Daoutidis, P. (2018). Optimal decomposition for distributed optimization in nonlinear model predictive control through community detection. Comput. Chem. Eng. 111: 43–54, https://doi.org/10.1016/j.compchemeng.2017.12.010.Search in Google Scholar
Tang, Y., Agrawal, S., and Faenza, Y. (2020). Reinforcement learning for integer programming: learning to cut. In: International conference on machine learning. PMLR, pp. 9367–9376.Search in Google Scholar
Tawarmalani, M. and Sahinidis, N.V. (2005). A polyhedral branch-and-cut approach to global optimization. Math. Program. 103: 225–249, https://doi.org/10.1007/s10107-005-0581-8.Search in Google Scholar
Triantafyllou, N. and Papathanasiou, M.M. (2024). Deep learning enhanced mixed integer optimization: learning to reduce model dimensionality. arXiv preprint arXiv:2401.09556.10.1016/j.compchemeng.2024.108725Search in Google Scholar
Van Engelen, J.E. and Hoos, H.H. (2020). A survey on semi-supervised learning. Mach. Learn. 109: 373–440, https://doi.org/10.1007/s10994-019-05855-6.Search in Google Scholar
Vaupel, Y., Hamacher, N.C., Caspari, A., Mhamdi, A., Kevrekidis, I.G., and Mitsos, A. (2020). Accelerating nonlinear model predictive control through machine learning. J. Process Control 92: 261–270, https://doi.org/10.1016/j.jprocont.2020.06.012.Search in Google Scholar
Wächter, A. and Biegler, L.T. (2006). On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Prog. 1: 25–57, https://doi.org/10.1007/s10107-004-0559-y.Search in Google Scholar
Wang, J. and Ralphs, T. (2013). Computational experience with hypergraph-based methods for automatic decomposition in discrete optimization. In: Integration of AI and OR techniques in constraint programming for combinatorial optimization problems: 10th international conference, CPAIOR 2013, Yorktown Heights, NY, USA, May 18–22, 2013. Proceedings 10. Springer, pp. 394–402.10.1007/978-3-642-38171-3_31Search in Google Scholar
Wang, Z., Li, X., Wang, J., Kuang, Y., Yuan, M., Zeng, J., Zhang, Y., and Wu, F. (2023). Learning cut selection for mixed-integer linear programming via hierarchical sequence model. arXiv preprint arXiv:2302.00244.Search in Google Scholar
Weiss, K., Khoshgoftaar, T.M., and Wang, D. (2016). A survey of transfer learning. J. Big Data 3: 1–40, https://doi.org/10.1186/s40537-016-0043-6.Search in Google Scholar
Xu, L., Hutter, F., Hoos, H.H., and Leyton-Brown, K. (2011). Hydra-MIP: automated algorithm configuration and selection for mixed integer programming. In: RCRA workshop on experimental evaluation of algorithms for solving problems with combinatorial explosion at the international joint conference on artificial intelligence (IJCAI), pp. 16–30.Search in Google Scholar
Zhu, J.-J. and Martius, G. (2020). Fast non-parametric learning to accelerate mixed-integer programming for hybrid model predictive control. IFAC-PapersOnLine 53: 5239–5245, https://doi.org/10.1016/j.ifacol.2020.12.1200.Search in Google Scholar
© 2025 the author(s), published by De Gruyter, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Frontmatter
- Editorial
- Recent developments and prospects of machine learning in chemical engineering
- Reviews
- Recent advances in continuous nanomanufacturing: focus on machine learning-driven process control
- Uncertainty quantification and propagation in atomistic machine learning
- A tutorial review of machine learning-based model predictive control methods
- Accelerating process control and optimization via machine learning: a review
- Machine learning applications for thermochemical and kinetic property prediction
Articles in the same Issue
- Frontmatter
- Editorial
- Recent developments and prospects of machine learning in chemical engineering
- Reviews
- Recent advances in continuous nanomanufacturing: focus on machine learning-driven process control
- Uncertainty quantification and propagation in atomistic machine learning
- A tutorial review of machine learning-based model predictive control methods
- Accelerating process control and optimization via machine learning: a review
- Machine learning applications for thermochemical and kinetic property prediction