Design, development, and optimization of the Somnomat Casa: a rocking bed for sleep studies and nocturnal interventions in home settings
-
Alexander Breuss

 ,
Manuel Fujs
,
Manuel Fujs

Abstract
Vestibular Stimulation (VS) has been shown to positively affect various autonomic body functions, including sleep. In the past, VS was often investigated using large and complex rocking beds that would only allow for short intervention periods in constrained lab settings. In this work, we present an overview of the mechanics, kinematics, dynamics, and tuning of our latest rocking bed, the Somnomat Casa. Its compact dimensions, comparable to a standard single bed, its connectivity, and easy usability, allow for prolonged studies in home settings investigating the effects of VS during sleep. In a first six-month study with a 12-year-old boy suffering from primary mitochondrial disease with an associated severe sleep disorder, we observed significant improvements in sleep duration (+25 %) and quality of life, as well as a 75 % reduction in caregiving interactions and a 40 % reduction in overall caregiving time. Based on these promising findings, we are currently testing the Somnomat Casa with various patient groups for multiple months each, including elderly with insomnia, children with sleep disorders, Parkinson’s disease patients, and individuals with post-stroke insomnia.
Zusammenfassung
Die vestibuläre Stimulation (VS) hat sich als positiv für verschiedene autonome Körperfunktionen, einschließlich des Schlafs, erwiesen. In der Vergangenheit wurde die VS oft mit großen und komplexen Schaukelbetten untersucht, die nur kurze Interventionen in eingeschränkten Laborumgebungen zuließen. In dieser Arbeit präsentieren wir einen überblick über die Mechanik, Kinematik, Dynamik und Optimierung unseres neuesten Schaukelbettes, des Somnomat Casa. Die kompakten Abmessungen vergleichbar mit einem Standard-Einzelbett, sowie die einfache Bedienbarkeit, gepaart mit umfangreicher Konnektivität, ermöglichen mehrmonatige Studien im häuslichen Umfeld zur Untersuchung der Auswirkungen von VS während des Schlafs. In einer ersten sechsmonatigen Studie mit einem 12-jährigen Jungen, der an einer primären mitochondrialen Stoffwechselstörung mit einer damit verbundenen schweren Schlafstörung litt, beobachteten wir signifikante Verbesserungen in der Schlafdauer (+25 %) und Lebensqualität sowie eine Reduktion der Pflegeinteraktionen um 75 % und eine Verringerung der nächtlichen Pflegezeit um 40 %. Auf Basis dieser vielversprechenden Ergebnisse testen wir derzeit den Somnomat Casa mit verschiedenen Patientengruppen über mehrere Monate hinweg, einschließlich älterer Menschen mit Insomnie, Kindern mit Schlafstörungen, Parkinson-Patienten und Patienten mit post-stroke Insomnie.
1 Introduction
1.1 Vestibular stimulation for improved sleep and disorder treatment
Vestibular Stimulation (VS) presents a promising addition to traditional medical treatments, as it has been shown to affect autonomous body functions, attention, and sensory perception, as well as to have positive effects on various psychological symptoms and neurodegenerative disorders [1], [2], [3]. Additionally, VS can enhance sleep quality, structure, and consolidation, resulting in deeper sleep and faster sleep onset times [4], [5], [6], [7], [8].
1.2 Related work: past rocking beds to induce vestibular stimulation
Specially designed rocking beds have been used in the past to explore the sleep-promoting effects of VS in individuals. These beds were mainly tailored for short-term studies and required specialized facilities and engineers for operation. Woodward et al. suspended a standard-sized twin bed from the ceiling with four ropes, powered by a variable-speed motor [4]. While effective in lab settings, its size made it impractical for home use. Similarly, Bayer and colleagues developed a parallel swing bed with metal bars, suspended from the ceiling, using a motor to create sinusoidal horizontal accelerations [5]. Despite finding that lateral rocking during afternoon naps increased spindle activity and slow oscillations in EEG recordings, indicating improved sleep quality and a smoother transition from wakefulness to deep sleep [5], their bed was also limited to laboratory environments, hindering long-term studies. Shibagaki et al. recorded maternal rocking movements and designed a reclining chair to replicate these motions [6].
Our research group has also developed several rocking beds: The Somnomat M3 introduced a 6-DoF ceiling-mounted setup to investigate the effects of rocking movements on relaxation [9]. However, due to the complexity of actuating this cable-driven robot, the space requirements, and the impracticality to conduct studies, the Somnomat A and B were then developed as more compact platforms with single degree of freedom movements (translational or rotational) [9]. Although successful in certain aspects, these platforms still faced challenges with maintenance, noise, and complex setup and operation procedures.
1.3 Rocking bed for long-term sleep studies in home settings
Our latest rocking bed, the Somnomat Casa (Figure 1), is based on Roberts linkages that provide a quasi-linear movement along the longitudinal axis and allow for a quieter actuation system. Its dimensions 90 cm × 200 cm × 60 cm for width, length, height (including mattress), respectively, are comparable to a regular-sized single bed, making the bed fit easily into private households. The bed can be turned on and off through a simple user interface (Figure 2), allowing the Somnomat Casa to be used without any prior training in private environments for extensive durations.
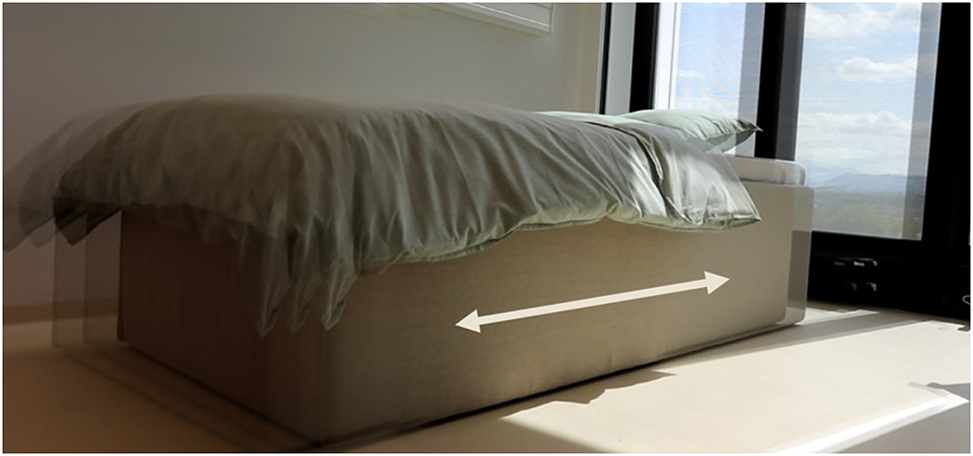
Somnomat Casa: rocking bed that translates along the longitudinal axis. The dimensions of the bed (90 cm × 200 cm × 60 cm for its width, length, and height, respectively) are comparable to a conventional single bed.

User interface of the Somnomat Casa: a rigid handle facilitates bed access and two buttons control lighting and start and stop of the rocking motions. The handle’s light can further signal warnings, like red for safety stops after collisions. Furthermore, the handle has an integrated accelerometer (MC3479 accelerometer, MEMSIC Semiconductor, United States) to detect movements on the bed, as well as a light sensor to monitor day and night patterns of the user.
In this work, we present, the kinematics, dynamics, and actuation mechanism of the Somnomat Casa (c.f. subsection 2.1 and subsection 2.2). Furthermore, we include parts of previously published work on strategies to tune the motor controller [10], [11] and treatment outcome using the Somnomat Casa [12], [13], making this publication a fully comprehensive overview of our latest rocking bed.
2 Methods
2.1 Mechanism of the Somnomat Casa
The Somnomat Casa employs a suspended mechanism consisting of four passive Roberts linkages to move quasi-linearly along its longitudinal axis (Figure 3) with an amplitude of 10 cm. The movement is generated by a single 400 W motor (EC60, maxon Switzerland AG) with a nominal torque of 843 Nm. This motor is coupled with a 14:1 gear (IMS Gear SE Co. KGaA, Germany). Together, they drive a flywheel with a slider-crank mechanism attached 10 cm from the center of the flywheel to a single mounting point on the top frame. This setup allows for a sinusoidal movement of the top frame around the midpoint without the need to reverse the motor direction.
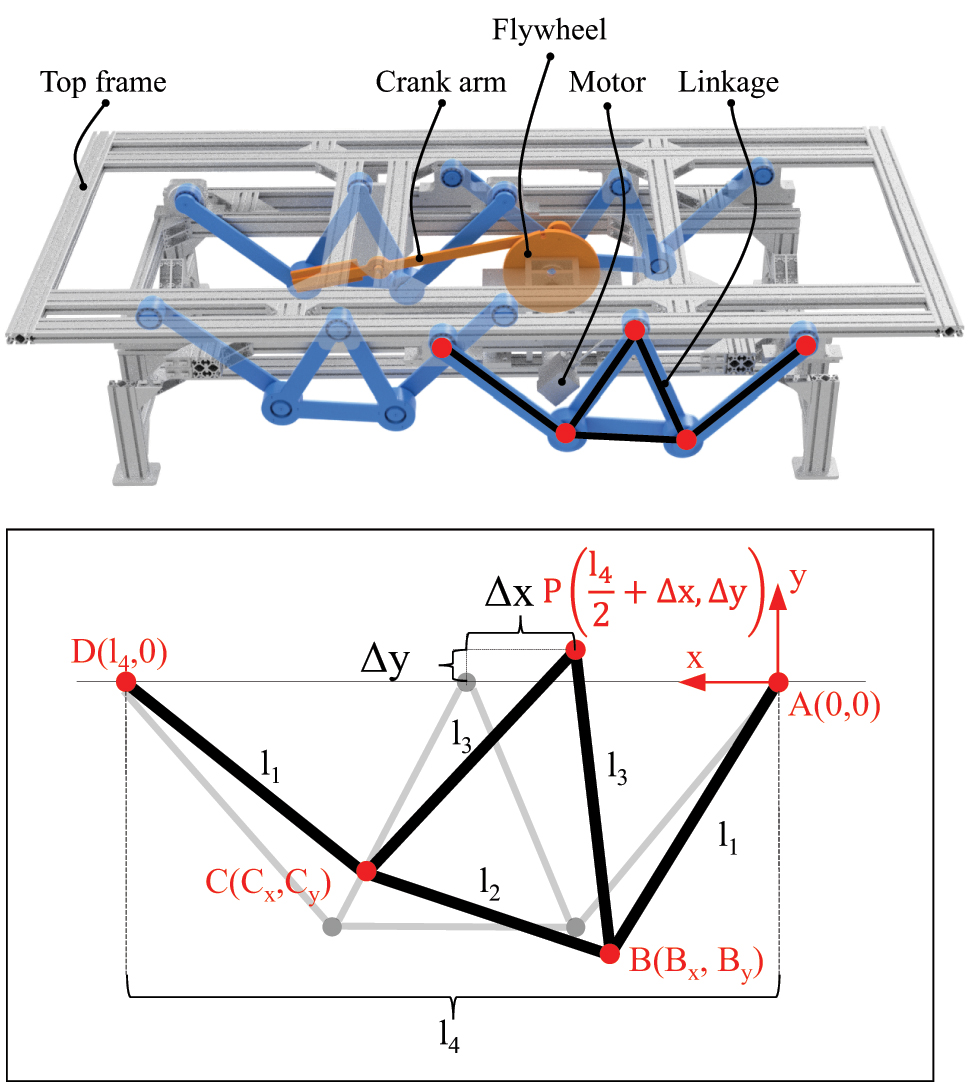
Mechanics of the Somnomat Casa: four roberts linkages connect the base frame of the bed with the top frame of the bed.
The geometry of the mechanism (Figure 3) can be described using the following five equations:
Since only longitudinal movements are desirable, the vertical deflection Δy should be minimized. Δx corresponds to the amplitude of the periodic movement and is set to 10 cm due to the geometry of the crank mechanism. Using MATLAB R2021a (MathWorks, Natick, MA, USA), we solved this system of equations for various parameter sets (l
1, l
2, l
3, l
4). In particular, we performed a grid search where we constrained the maximally allowed distance from the hinge to the lowest point of the mechanism at the maximal deflection to h
max = 300 mm. The link lengths l
1, l
2, and l
4 were then limited to
2.2 Kinematics and dynamics of the Somnomat Casa
Three coordinate systems (
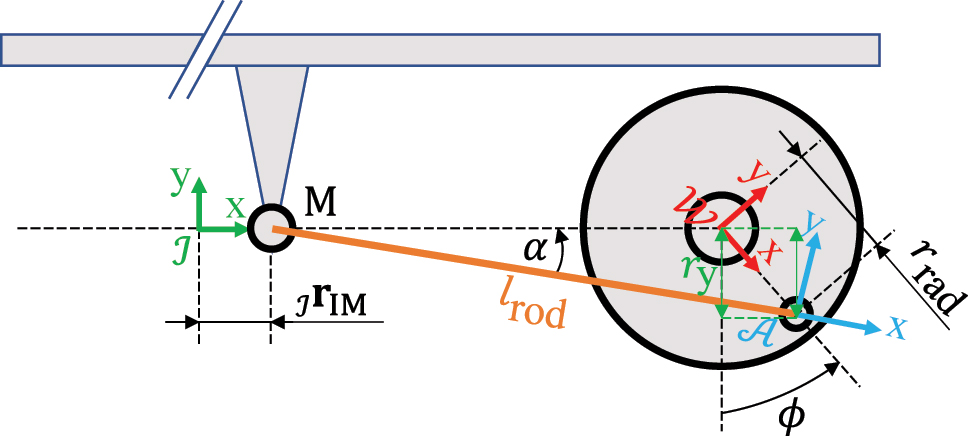
Coordinate systems (
M’s position is derived by summing the rotated distance vectors in frame
with the distance vectors:
and rotation matrices:
The angle α is obtained using the geometric relations
These calculations yield the position of the bed’s midpoint, M, in coordinate frame
Only the x-coordinate of the bed’s position vector is provided due to neglecting the motion in y-direction and the absence of z-axis (body lateral) movements. The bed’s midpoint velocity can be obtained by differentiating the position with respect to time or via forward kinematics, describing the relationship between
The analytic Jacobian, denoted in coordinate frame
This Jacobian enables computation of the linear velocity at position M, equivalent to the time derivative of its position:
Further, the acceleration of the bed attachment point M is computed as the time derivative of its linear velocity:
The torque required to drive the trajectory is determined through the application of Lagrange’s method, which involves the formulation of the Lagrangian function L, representing the difference between the kinetic energies T and potential energies V of a system of rigid bodies:
The generalized forces τ are then obtained through the Euler–Lagrange equation
where ϕ serves as the generalized coordinate that fully characterizes the system. The kinetic energies T associated with the n bodies are defined as
where J s is the moment of inertia in the central of gravity of the body. For the Somnomat Casa, the kinetic energy can be calculated as follows
where m bed is 134 kg, including an average male adult of 79 kg and the flywheel with a mass m wheel of 1.8 kg and a radius r wheel of 0.12 m. The potential energy can be neglected as the vertical movements of the top frame are negligible.
The generalized force vector accounts for all external forces performing work on the system and is determined through the external forces from the patient, friction, crank-arm gravitational force, and motor torque (c.f. Figure 5). These forces are transformed into torques centered on the wheel and align with the motor torque, contributing to the determination of the generalized force.
with the rotational Jacobian of the flywheel
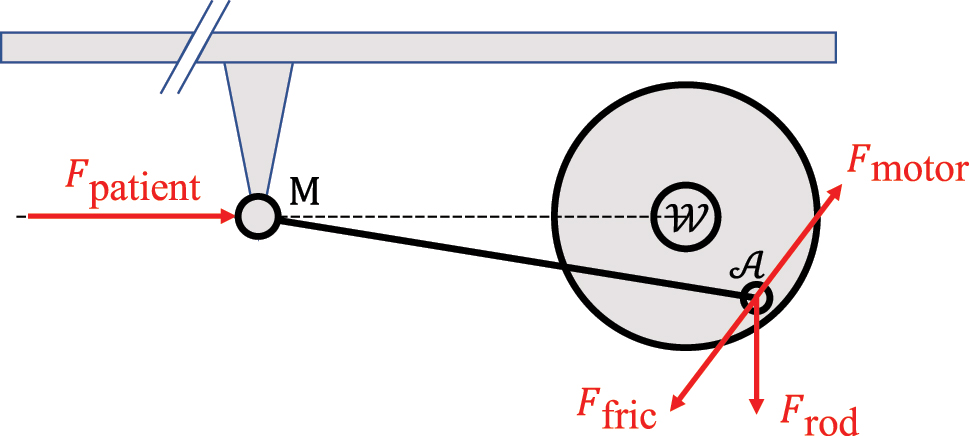
External forces applied to the system.
The force F
rod acting on the attachment point of the flywheel equals half the gravitational force of the rod, as the other half of the mass of the rod is carried by point M:
The motor torque required to attain the desired trajectory is then determined by combining the generalized torque τ, kinetic energy T, and solving for the motor torque T motor.
2.3 Reference trajectory of the bed and velocity of the flywheel
Kompotis et al. suggest the key factor for sleep promotion with rocking movements is the maximal linear acceleration [14]. To achieve a sinusoidal acceleration trajectory with a finite crank-arm length, the motor’s reference velocity
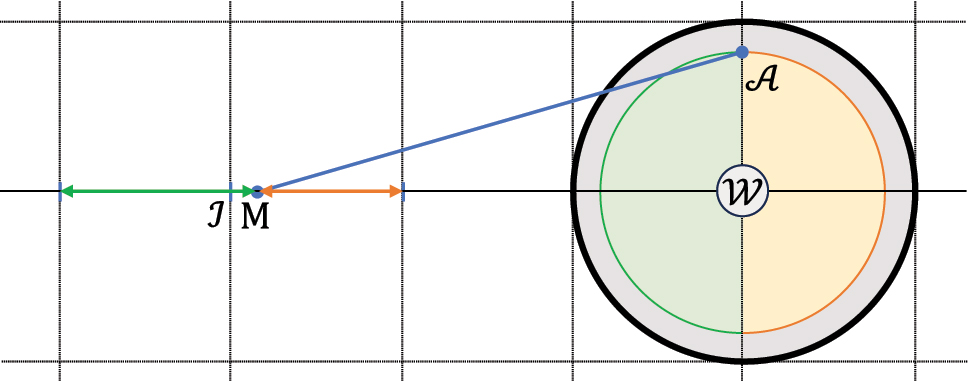
Due to the finite length of the crank arm, the velocity of the flywheel needs to be modulated. Otherwise, the orange and green distances would be covered in the same time period, rendering the movement asymmetric.
This can be done by setting the desired position trajectory of the bed platform equal to the one achieved with an infinite crank-arm at the corresponding points in time:
The time-dependent ideal angle ϕ ideal(t) of the flywheel can be calculated using the ideal reference angular velocity in rad/s
Here,
Inserting ϕ ideal(t) into Equation (12), we solve for ϕ desired(t):
The reference angular velocity of the flywheel is then calculated using inverse differential kinematics:
In Figure 7, we illustrate the modulated velocity of the flywheel, that leads to a sinusoidal position (Figure 8) and acceleration (Figure 9) curve of the bed.
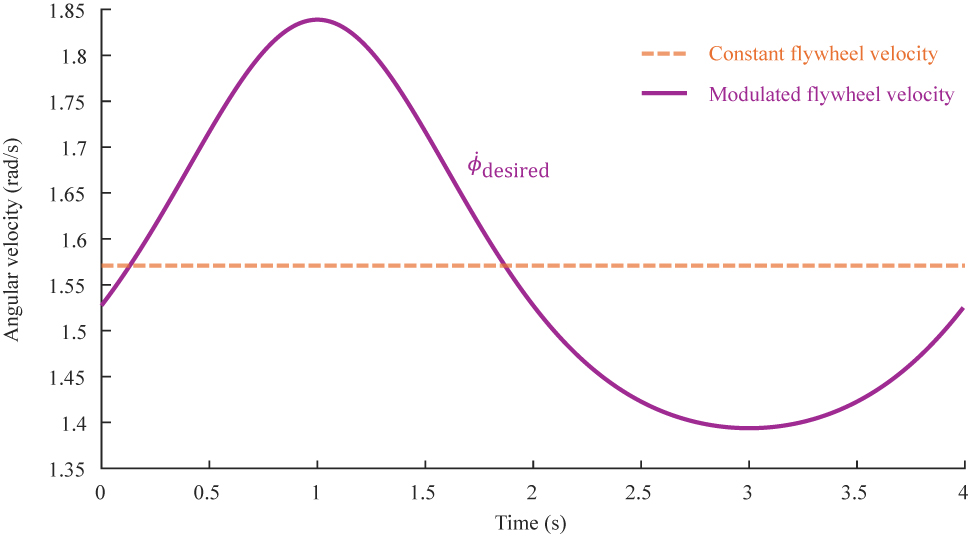
The purple line corresponds to the desired motor velocity
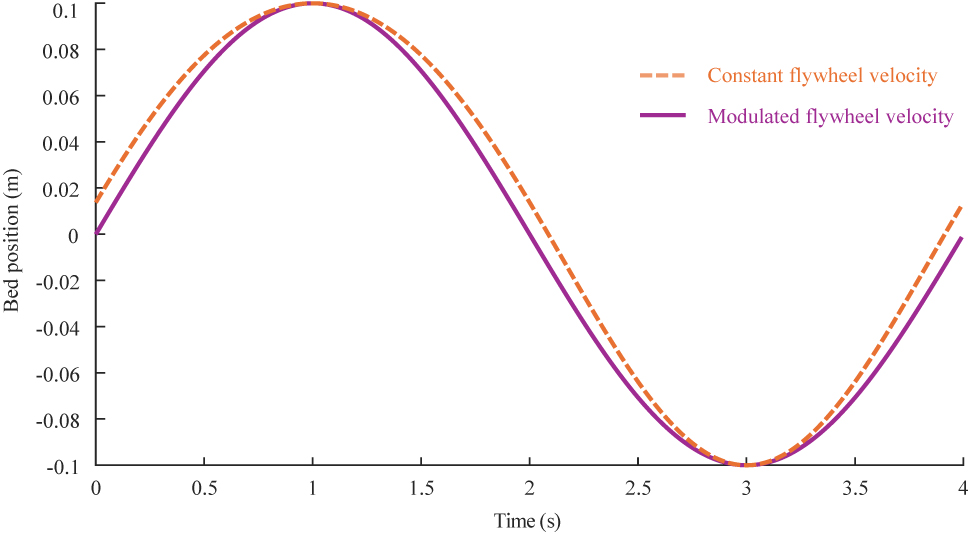
Position of the top frame of the Somnomat Casa.
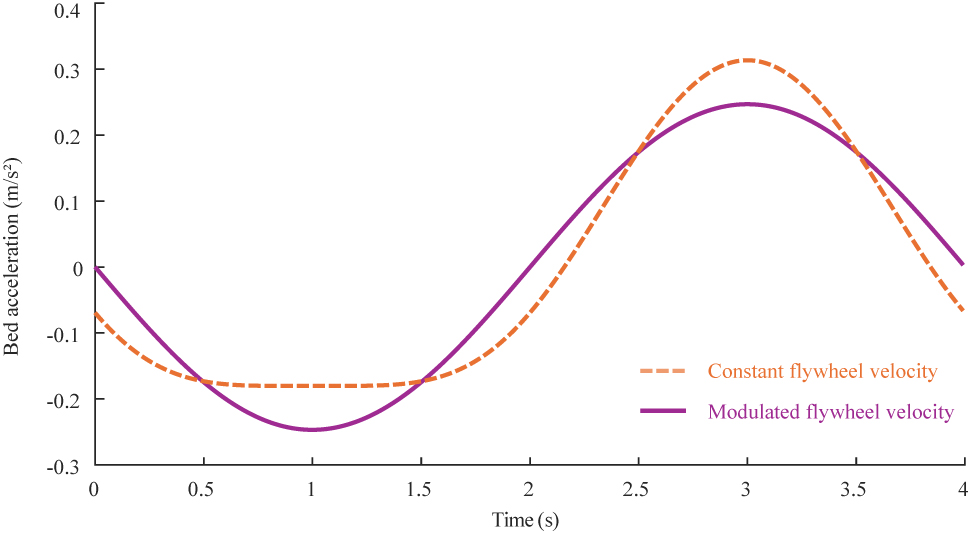
Apparent accelerations on the top frame of the Somnomat Casa.
2.4 Control of the Somnomat Casa
The Somnomat Casa operates through a hierarchical control system comprised of three main components: High-level user commands are received from a Raspberry Pi 4 (Raspberry Pi Foundation, Cambridge, United Kingdom), which can also record, process, and store auxiliary sensor information collected during sleep studies. Upon turning on the bed, a command is sent to an ESP32 microcontroller board (Espressif, Shanghai, China) via UART. The ESP32 then supplies the controller gains, as well as the motion trajectory at 1 kHz, to an EPOS4 motor controller (Maxon Motor AG, Sachseln, Switzerland) through a CAN-bus. The motor controller runs at 10 kHz and we implemented a PI velocity controller with an integrated anti-windup protection within the feedback loop, aiming for both disturbance rejection and reference tracking, as illustrated in Figure 10.
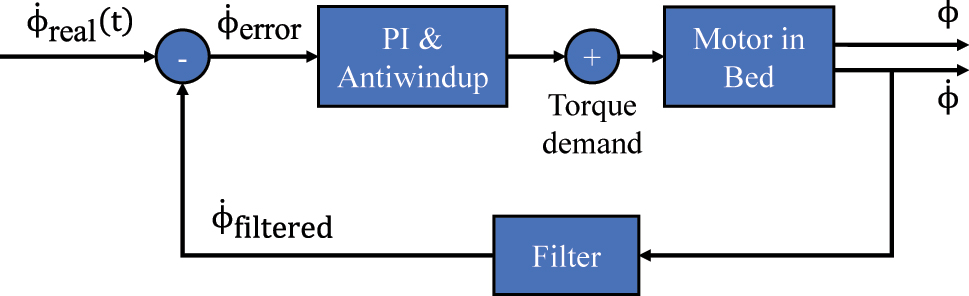
Velocity controller of the Somnomat Casa.
The velocity is filtered with a first-order lowpass filter through the transfer function given by the manufacturer [15]:
Using the gains obtained in subsection 3.2, we obtain a filter constant of τ = 64 ms.
2.5 Tuning of the Somnomat Casa
In previous work, we proposed a novel approach to autotune the Somnomat Casa using Gaussian Processes [10], [11]. In this section, we walk through several of these equations to achieve the goal of giving a complete overview of the Somnomat Casa, with full acknowledgment of reusing equations and figures from [10], [11]. In the aforementioned work, we simulated the bed’s kinematics (subsection 2.2) and optimized the controller gains θ = (k P , k I ) based on a predefined objective function, which involved minimizing the modified mean squared error e(θ) between the desired and measured accelerations from the integrated accelerometer in the handle of the bed (c.f. Figure 2). We used the kinematic model of the Somnomat Casa due to its simplicity and sufficiency in describing the bed’s midpoint motion. Furthermore, the design of the controller (PI velocity controller with an anti-windup) focuses on disturbance rejection and reference tracking which is more aligned with kinematic aspects (velocity tracking) rather than dynamic aspects (force/torque control).
where f is the sampling rate of the accelerometer,
The expected performance μ(θ) and variance σ
2(θ) were computed based on the prior mean function m(θ), deviation vector
The correlation matrix K is obtained after N experiments through:
with σ metric being the uncertainty in the measurements during the experiment and δ i,j the Kronecker delta.
The process of selecting the next parameter θ′ was guided by the Expected Improvement criterion. This criterion involves selecting a set of parameters that are expected to provide the greatest improvements when evaluated with respect to the currently best metric evaluation κ. The acquisition function α is then formulated as
where Φ is the standard cumulative Gaussian distribution and ϕ is the standard Gaussian probability density function. Using simulations, we efficiently determined the optimal parameters θ* by minimizing the error metric e(θ) without the need for extensive costly physical evaluations:
Figure 11 shows a dense evaluation of the error metric e(θ) in simulation for all possible θ and Figure 12 illustrates the increased search density around neighborhoods with low errors, a key characteristic of Gaussian Processes.
![Figure 11:
Objective function evaluated for all possible control parameters in simulation. The error is minimized for the control parameter θ*, reported in subsection 3.2. Comparing with Figure 12, we observe an increased search density around areas with a low error. Figure taken from [11].](/document/doi/10.1515/auto-2023-0219/asset/graphic/j_auto-2023-0219_fig_011.jpg)
Objective function evaluated for all possible control parameters in simulation. The error is minimized for the control parameter θ*, reported in subsection 3.2. Comparing with Figure 12, we observe an increased search density around areas with a low error. Figure taken from [11].
![Figure 12:
Illustration of the search pattern obtained from the Gaussian process in simulation. After an initial random guess, the next control parameter θ′ is selected that likely reduces the error e(θ′). Figure taken from [11].](/document/doi/10.1515/auto-2023-0219/asset/graphic/j_auto-2023-0219_fig_012.jpg)
Illustration of the search pattern obtained from the Gaussian process in simulation. After an initial random guess, the next control parameter θ′ is selected that likely reduces the error e(θ′). Figure taken from [11].
2.6 Household implementation and evaluation
To evaluate the efficacy of the new rocking bed and gather user feedback, we conducted interviews with four Parkinson’s patients, focusing on their perceptions of safety, usability, and their willingness to put the bed into their personal bedrooms. Additionally, we installed the Somnomat Casa in the bedroom of a 12-year-old boy diagnosed with primary mitochondrial disease and a severe associated sleep disorder [12], [13]. Notably, the boy previously experienced improved sleep during night train rides. To replicate this experience, we implemented various multi-modal sensory stimuli reminiscent of train rides (Figure 13) for periods ranging from two to four weeks each, spanning a total duration of six months. Throughout this period, we assessed sleep duration and quality using the Mini Sleep Questionnaire [16], monitored changes in pulse rate, and captured videos to document nocturnal interactions between the boy and caregivers.
![Figure 13:
Timeline and motion parameters for the six-month study with the 12-year-old boy suffering from mitochondrial disease [12], [13]. The first four interventions lasted two weeks each and were separated by a one-week washout period. Subsequent to the series of four two-week interventions, a final four-week intervention was applied with the subjectively favored movement profile. This change in intervention duration allowed to explore effects of varying duration.](/document/doi/10.1515/auto-2023-0219/asset/graphic/j_auto-2023-0219_fig_013.jpg)
Timeline and motion parameters for the six-month study with the 12-year-old boy suffering from mitochondrial disease [12], [13]. The first four interventions lasted two weeks each and were separated by a one-week washout period. Subsequent to the series of four two-week interventions, a final four-week intervention was applied with the subjectively favored movement profile. This change in intervention duration allowed to explore effects of varying duration.
3 Results
3.1 Suitable link lengths for minimizing the vertical deflection of the movement
Figure 14 depicts a variety of ratio combinations of connecting elements of the Roberts linkages, with the colors describing the resulting vertical deflection Δy. As the motion should be linear, the vertical deflection Δy should be minimized.

All link length combinations with a resulting vertical deflections Δy ≤ 0.5 mm.
All ratios of linkage elements yielding a Δy ≤ 0.5 mm are as follows:
For the Somnomat Casa, the following link lengths were chosen: l 1 = 367 mm, l 2 = 260 mm, l 3 = 289 mm, l 4 = 781 mm.
3.2 Computational complexity for obtaining optimal control parameters using Gaussian processes
As shown in our previous work in detail, we compared the average number of iterations needed to obtain optimal parameters, while varying the search space size in simulation. A naïve search resulted in a quadratic growth of the computational time while for the Gaussian Processes proposed in subsection 2.5, the search time remained constant (Figure 15) [11].
![Figure 15:
The time required to find the optimal parameter using a naïve approach increased exponentially with increasing search space size, while it remained constant for the approach based on Gaussian processes. Figure adapted from [11].](/document/doi/10.1515/auto-2023-0219/asset/graphic/j_auto-2023-0219_fig_015.jpg)
The time required to find the optimal parameter using a naïve approach increased exponentially with increasing search space size, while it remained constant for the approach based on Gaussian processes. Figure adapted from [11].
3.3 Control parameters in simulation and on the Somnomat Casa
After the autotuning process in simulation, the following final controller gains were obtained: θ* = (k P , k I ) = (105.52 μA s/rad, 105.76 μA/rad) = (331,131 μA s/rad, 575,440 μA/rad).
When performing the autotuning routine on the Somnomat Casa, k P,Somnomat = 394,320 μA s/rad was very similar to the proportional gain found in simulation. However, k I,Somnomat = 14,027,901 μA/rad was significantly larger, indicating a mismatch between the modelled and the actual bed. Figure 17 depicts the tracking performance of the Somnomat Casa after the autotuning with the accelerations measured through the integrated accelerometer inside the handle (Figure 2).
3.4 Patient feedback
Up to now, the Somnomat Casa was evaluated with five patients. Four Parkinson’s Patients who tested the Somnomat Casa in one afternoon session during the development process and one paediatric patient with a mitochondrial disease (MD) who slept in the Somnomat Casa for six months. For the four Parkinson’s patients, signed informed consents were obtained as required by the institution for preliminary device evaluations and an ethical waiver was obtained from the cantonal ethic committee Bern for the study with the paediatric patient (Req-2021-01,096).
The responses from the Parkinson’s patients were very positive, and all patients – except for one patient with motion sickness – could envision using the device in their private household for an extensive period.
In the patient with mitochondrial disease, we observed an increase in the sleep duration by 25 % and the subjective fatigue, assessed using a subscale of the Checklist Individual Strength [17], decreased by 40 %, falling below the threshold of severe fatigue (Figure 16). Furthermore, we documented a reduction of required caregiver interactions by 75 %, and a reduction of caregiving time by 40 % [12], [13] (Figure 17).
![Figure 16:
At the end of the study, the sleep duration of the patient increased statistically significant. Furthermore, his quality of life improved notably, with his fatigue not being characterized as severe anymore through the checklist of individual strength. Finally, the frequency and duration his caregivers needed to interact with him, also decreased [12], [13].](/document/doi/10.1515/auto-2023-0219/asset/graphic/j_auto-2023-0219_fig_016.jpg)
At the end of the study, the sleep duration of the patient increased statistically significant. Furthermore, his quality of life improved notably, with his fatigue not being characterized as severe anymore through the checklist of individual strength. Finally, the frequency and duration his caregivers needed to interact with him, also decreased [12], [13].
![Figure 17:
Comparison between measured (using IMU) and desired accelerations on the real setup after performing the autotuning directly on the Somnomat Casa. Figure adapted from [11].](/document/doi/10.1515/auto-2023-0219/asset/graphic/j_auto-2023-0219_fig_017.jpg)
Comparison between measured (using IMU) and desired accelerations on the real setup after performing the autotuning directly on the Somnomat Casa. Figure adapted from [11].
4 Discussion and outlook
In this work, we have presented the mechanical design (subsection 2.1), the kinematics, the dynamics (subsection 2.2), as well as the controller (subsection 2.3) of the Somnomat Casa, the first rocking bed worldwide that allows for long-term nocturnal translational vestibular stimulations in private home settings. Its compact size, safety, and user friendliness make it easy to use for various patient groups.
The Somnomat Casa moves linearly along the longitudinal axis given a combination of Robert linkages. The extensive range of link length ratios, within which combinations yielding small vertical deflections (c.f. Table 1) can be found, complicates the determination of specific ranges for length ratios. As such, it is not possible to calculate an ideal ratio that describes the desired horizontal movement; instead, there exists a larger solution space where suitable combinations can be found. One approach to circumvent this problem is to further constrain the solution space by posing additional constraints, such as total material used for example.
Ratios of linkage elements yielding a vertical deflection of Δy of
| Ratio | Min (⋅) | Max (⋅) |
|---|---|---|
| l 1/l 2 | 1.2206 | 2.5467 |
| l 1/l 3 | 1.0015 | 1.9291 |
| l 1/l 4 | 0.4568 | 0.8444 |
For the tuning of the velocity controller, we demonstrated that we can find an optimal set of controller gains after a constant number of iterations using Gaussian Processes, independent of the search space size (subsection 3.2). However, as the noise emission from the motor was not part of the optimization objective (Equation (17)), we observed a considerable increase in noise despite achieving smoother motion. In future work, we will include readings from a sound-level meter in the objective function.
In our first long-term study involving a patient with primary MD and an associated severe sleep disorder, we observed a statistically significant improvement in sleep duration at the end of the interventions (Figure 16). This improvements are unlike any previously tried pharmaceutical and non-pharmaceutical treatments. No side effects were reported and the bed continued to function over the entire study period, highlighting the Somnomat Casa’s reliability and safety.
The feedback collected from the four Parkinson’s patients and the results obtained from the first half-year patient study are very promising. Currently, various medical institutions in and outside Switzerland are using the Somnomat Casa to explore the effects of vestibular stimulation on other patient groups, including elderly with insomnia, children with sleep disorders, Parkinson’s disease patients, and individuals with post-stroke insomnia. We hope that the Somnomat Casa can serve as a platform to administer long-term vestibular stimuli in private settings, thereby allowing a better understanding of the therapeutic potential of vestibular stimulation across diverse medical conditions and patient groups.
About the authors

Alexander Breuss graduated in Computer Science and Robotics, Systems and Control from ETH Zurich. He is currently a researcher at the Sensory-Motor Systems Lab at ETH Zurich where he investigates the use of robotic beds for the treatment of various disorders across different patient groups.

Manuel Fujs is a research assistant and engineer in the Sensory-Motor Systems Lab at ETH Zurich. With his expertise in robotics, he is currently developing innovative robotic sleep intervention systems, including rocking beds.

Miriam Müller is currently a software engineer at Noser Engineering. The contribution to the mentioned research originates from her time as a master student at the Sensory-Motor Systems Lab at ETH Zurich.

Zelio Suter is an R&D Software Engineer at Bühler AG. He earned both his Bachelor's in Mechanical Engineering and his Master's in Robotics Engineering from ETH Zurich. His contribution to the paper originated from his time at the Sensory-Motor Systems Lab.

Nicola Wyss is a mechanical engineering graduate at ETH Zurich. The mentioned research on the mechanism of the Somnomat Casa originates from his time as a research assistant at the Sensory-Motor Systems Lab. His research interests include robotics for surgical and rehabilitation applications.

Robert Riener is full professor of Sensory-Motor Systems at ETH Zurich and full professor of medicine at the University of Zurich, Switzerland. Riener has published more than 500 peer-reviewed articles, 36 book chapters and filed 26 patents. He is the initiator and organizer of the Cybathlon, president of ICORR, AAAS Leshner Fellow and he obtained more than 20 personal distinctions, including an honorary doctor degree from University of Basel.
-
Research ethics: Not applicable.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Competing interests: The authors state no conflict of interest.
-
Research funding: This work was supported by Promedica Foundation, Switzerland.
-
Data availability: Not applicable.
References
[1] X. Omlin, F. Crivelli, L. Heinicke, S. Zaunseder, P. Achermann, and R. Riener, “Effect of rocking movements on respiration,” PLoS One, vol. 11, p. e0150581, 2016. https://doi.org/10.1371/journal.pone.0150581.Search in Google Scholar PubMed PubMed Central
[2] A. Thurrell, K. Jáuregui-Renaud, M. Gresty, and A. Bronstein, “Vestibular influence on the cardiorespiratory responses to whole-body oscillation after standing,” Exp. Brain Res., vol. 150, no. 3, pp. 325–331, 2003. https://doi.org/10.1007/s00221-003-1422-8.Search in Google Scholar PubMed
[3] K. D. Monahan, M. K. Sharpe, D. Drury, A. C. Ertl, and C. A. Ray, “Influence of vestibular activation on respiration in humans,” Am. J. Physiol. Regul. Integr. Comp. Physiol., vol. 282, no. 3, pp. R689–R694, 2002. https://doi.org/10.1152/ajpregu.00568.2001.Search in Google Scholar PubMed
[4] S. Woodward, E. Tauber, A. J. Spielman, and M. J. Thorpy, “Effects of otolithic vestibular stimulation on sleep,” Sleep, vol. 13, no. 6, pp. 533–537, 1990. https://doi.org/10.1093/sleep/13.6.533.Search in Google Scholar PubMed
[5] L. Bayer, et al.., “Rocking synchronizes brain waves during a short nap,” Curr. Biol., vol. 21, no. 12, pp. R461–R462, 2011. https://doi.org/10.1016/j.cub.2011.05.012.Search in Google Scholar PubMed
[6] H. Shibagaki, K. Ashida, Y. Morita, and K. Yokoyama, Verifying the Sleep-Inducing Effect of a Mother’s Rocking Motion in Adults, Oita, Japan, Masanori Sugisaka, 2017.10.2991/jrnal.2017.4.2.5Search in Google Scholar
[7] A. A. Perrault, et al.., “Whole-night continuous rocking entrains spontaneous neural oscillations with benefits for sleep and memory,” Curr. Biol., vol. 29, no. 3, pp. 402–411.e3, 2019. https://doi.org/10.1016/j.cub.2018.12.028.Search in Google Scholar PubMed
[8] R. M. van Sluijs, et al.., “Effect of rocking movements on afternoon sleep,” Front. Neurosci., vol. 13, 2020, Art. no. 1446. https://doi.org/10.3389/fnins.2019.01446.Search in Google Scholar PubMed PubMed Central
[9] F. Crivelli, L. Heinicke, X. Omlin, and R. Riener, “Somnomat: a novel device to investigate the influence of vestibular stimulation on sleep,” in 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, 2014, pp. 774–779.10.1109/BIOROB.2014.6913872Search in Google Scholar
[10] A. Breuss, Z. Suter, M. Fujs, and R. Riener, “Improving sleep through closed-loop autotuning of a robotic bed using Gaussian processes,” in Proceedings on Automation in Medical Engineering, Proc AUTOMED, vol. 2, 2023.Search in Google Scholar
[11] A. Breuss, Z. Suter, M. Fujs, and R. Riener, “Enhancing sleep quality with closed-loop autotuning of a robotic bed,” in 2023 International Conference on Rehabilitation Robotics (ICORR), 2023, pp. 1–6.10.1109/ICORR58425.2023.10304729Search in Google Scholar PubMed
[12] A. Breuss, et al.. “Individual therapeutic trial of a rocking bed for a sleep disorder in a patient with a severe mitochondrial disease,” in Society for the Study of Inborn Errors of Metabolism (SSIEM) Annual Symposium 2023, Jerusalem, Israel, 2023. Presented in August 2023.Search in Google Scholar
[13] A. Breuss, et al.., “Nocturnal vestibular stimulation using a rocking bed improves a severe sleep disorder in a patient with mitochondrial disease,” J. Sleep Res., Art. no. e14153, 2024, https://doi.org/10.1111/jsr.14153.Search in Google Scholar PubMed PubMed Central
[14] K. Kompotis, et al.., “Rocking promotes sleep in mice through rhythmic stimulation of the vestibular system,” Curr. Biol., vol. 29, no. 3, pp. 392–401, 2019. https://doi.org/10.1016/j.cub.2018.12.007.Search in Google Scholar PubMed
[15] M. M. AG, “Epos4 application notes collection,” 2019 [Online]. Available at: https://www.maxongroup.com.cn/medias/sys_master/root/8837359304734/EPOS4-Application-Notes-Collection-En.pdf Accessed: Dec. 01, 2023.Search in Google Scholar
[16] J. Zoomer, R. Peder, A. Rubin, and P. Lavie, “Mini sleep questionnaire for screening large populations for eds complaints,” in Sleep ’84, W. Koella, E. Ruther, and H. Schulz, Eds., Stuttgart, Gustav Fischer, 1985, pp. 467–470.Search in Google Scholar
[17] J. H. Vercoulen, C. M. Swanink, J. F. Fennis, J. M. Galama, J. W. van der Meer, and G. Bleijenberg, “Dimensional assessment of chronic fatigue syndrome,” J. Psychosom. Res., vol. 38, no. 5, pp. 383–392, 1994. https://doi.org/10.1016/0022-3999(94)90099-x.Search in Google Scholar PubMed
© 2024 the author(s), published by De Gruyter, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Frontmatter
- Editorial
- Special issue AUTOMED
- Survey
- Reviewing the potential of hearables for the assessment of bruxism
- Applications
- Model predictive control of blood glucose in critically ill patients using Gaussian processes
- Muscle fatigue detection based on sEMG signal using autocorrelation function and neural networks
- A switching lung mechanics model for detection of expiratory flow limitation
- Physiological hardware-in-the-loop test bench for mechanical ventilation
- Gaussian process-based nonlinearity compensation for pneumatic soft actuators
- Design, development, and optimization of the Somnomat Casa: a rocking bed for sleep studies and nocturnal interventions in home settings
- Tools
- Classroom-ready open-source educational exoskeleton for biomedical and control engineering
- An open-source research platform for mechanical ventilation based on Simulink® and STM32 nucleo
- Designing the user interface of a ventilator under the constraints of a pandemic
Articles in the same Issue
- Frontmatter
- Editorial
- Special issue AUTOMED
- Survey
- Reviewing the potential of hearables for the assessment of bruxism
- Applications
- Model predictive control of blood glucose in critically ill patients using Gaussian processes
- Muscle fatigue detection based on sEMG signal using autocorrelation function and neural networks
- A switching lung mechanics model for detection of expiratory flow limitation
- Physiological hardware-in-the-loop test bench for mechanical ventilation
- Gaussian process-based nonlinearity compensation for pneumatic soft actuators
- Design, development, and optimization of the Somnomat Casa: a rocking bed for sleep studies and nocturnal interventions in home settings
- Tools
- Classroom-ready open-source educational exoskeleton for biomedical and control engineering
- An open-source research platform for mechanical ventilation based on Simulink® and STM32 nucleo
- Designing the user interface of a ventilator under the constraints of a pandemic