Hearing exotic smooth structures
-
Leonardo F. Cavenaghi
 and
Llohann D. Sperança
and
Llohann D. Sperança

Abstract
This paper explores the existence and properties of basic eigenvalues and eigenfunctions associated with the Riemannian Laplacian on closed, connected Riemannian manifolds featuring an effective isometric action by a compact Lie group. Our primary focus is on investigating the potential existence of homeomorphic yet not diffeomorphic smooth manifolds that can accommodate invariant metrics sharing common basic spectra. We establish the occurrence of such scenarios for specific homotopy spheres and connected sums. Moreover, the developed theory demonstrates that the ring of invariant admissible scalar curvature functions fails to recover the smooth structure in many examples. We show the existence of homotopy spheres with identical rings of invariant scalar curvature functions, irrespective of the underlying smooth structure.
1 Introduction
A very classical and well-explored subject of geometric analysis is that of hearing shapes. Following [1], it addresses the relationship between the geometry of some Riemannian manifolds and the eigenvalues of its Laplacian operator acting on functions. Some remarkable developments are presented in [2], [3], [4], [5], [6], [7], [8], [9], [10].
Shortly, this paper mainly focuses on whether two homeomorphic but not diffeomorphic smooth manifolds admit invariant metrics sharing the same basic spectrum (Definition 3). With this aim, we use the analytical machinery and example constructions appearing in [11] to compare the basic spectra of two homeomorphic but not diffeomorphic manifolds. Theorem 3 provides examples of pairs of homeomorphic but not diffeomorphic manifolds M and M′ admitting invariant metrics
The geometric constructions in this paper are based on the following setup. We consider a special case of principal (G, H)-bibundle in which G = H. Following [13], recall that a groupoid G = (G 1 ⇉ G 0) is a category in which each arrow in G 1 has an inverse. Let G and H be Lie groupoids. A manifold P with a left G-action and a right H-action which commute is called a smooth G-H-bibundle. We much benefit from the geometric constructions in [11], [14]. To know, we look to smooth manifolds P carrying commuting free G-actions whose orbit spaces M, M′ carry G-actions. We name this construction a ⋆-diagram; see Equation (2). They constitute an example of principal G-bibundle (G = H).
A ⋆-diagram M ← P → M′ promotes a Hausdorff-Morita equivalence between the G-varieties M and M′, as firstly remarked in [11] and proved in [15]. We hope our geometric realizations shed light on the study of Lie groupoid Morita equivalence via Hilsum–Skandalis maps [13], [16]. This specifies the study of leaf spaces [17], and in the particular case of Riemannian foliations, the isospectrality question for the basic Laplacian is rather natural [18]. For instance, it has been shown in [19] that the spectrum of the basic Laplacian of a Riemannian foliation can be identified with the SO(q)-invariant spectrum of its Molino quotient manifold W via the Molino frame bundle lift (which is itself a bibundle, see, e.g., [20], [21]).
Let
where ∇ denotes the Levi–Civita connection of
Once a Haar measure on G is fixed, any element u ∈ W
k,p
(X) can be averaged along G to produce a basic or invariant function
Let
In the present context, where
Problem 1.
Find
To properly guarantee the existence of a solution to Problem 1, we define:
Definition 1.
Let
for every
For a deep explanation of the basics related to the Laplacian spectra on manifolds, we refer the reader to [23].
Note that the left-hand side in equation (1) is given by
where the inner product ⟨u,v⟩1,2 is the one associated with the norm ‖ ⋅ ‖ 1,2. It can be checked, using that X is closed and connected, that the norm
Hence, equation (1) is equivalent to
On the other hand, for each fixed
defines a linear functional with domain
The principle of symmetric criticality of Palais [24] guarantees that the same holds for every
Definition 2.
Let
It can be also shown that the collection {λ} of all possible invariant eigenvalues of
Definition 3.
Given two Riemannian manifolds
Definition 3 contrasts with other already present concepts in the literature. Given a Riemannian manifold X with an isometric action by a Lie group G (a Riemannian G-manifold), we know that G has a natural representation τ G on L 2(X) where for each f ∈ L 2(X) the function τ G (f) ≔ g·f is given by
note that, since G acts via isometries, the representation τ G commutes with the Laplacian Δ of M. Then, two Riemannian G-manifolds X and X′ are said to be equivariantly isospectral (with respect to G) if there is a unitary map U: L 2(X) → L 2(X′) such that [25], [26]
U◦Δ = Δ′◦U, that is, X and X′ are isospectral,
The notion of isospectrality presented in Definition 3 is exactly the one appearing in [27]. In [28], Sunada studies whether two finite groups H 1, H 2 acting on a smooth manifold X yield coinciding H i -invariant spectrum on X. Then, in [29], Sunada’s result is generalized to connected groups. Finally, Theorem 2.5 in [27] goes beyond, stating the following:
Theorem 1.
(Theorem 2.5 in [27]). Let X be a compact Riemannian manifold and G ≤ Isom(X) a compact Lie group. Suppose that H 1, H 2 ≤ G are closed, representation-equivalent subgroups. Then, the H i -invariant spectra of the Laplacian on X are equal.
Proposition 1 combined with Example 2 show that the conclusion in Theorem 2.5 in [27] extends to every pair of manifolds M, M′ fitting a ⋆-diagram.
Lastly, it may be the case that our appearing constructions bring insights on the following. Although two isospectral manifolds need not be isometric, further rigidity can be questioned. For instance, the result of Tanno in [8] ensures that any compact Riemannian manifold isospectral to a round sphere
2 Basic spectra of G-manifolds related by ⋆-diagrams
We outline a general procedure for constructing exotic manifolds based on their classical counterparts, extensively discussed in [11], [14], [30]. This is done by considering pairs of closed manifolds M, M′ carrying effective actions by a compact Lie group G, and fitting into a so-called ⋆-diagram M ← P → M′, which essentially realize M and M′ as quotients of a single manifold P by free commuting G-actions. Many exotic manifolds fit into these diagrams, and one can then use this structure to compare their invariant geometries once invariant metrics are considered. Notably, the concept of an exotic sphere originated in the 1950s with J. Milnor’s groundbreaking work [31]. Milnor introduced a family of 7-dimensional manifolds Σ7 homeomorphic to the classical sphere S7 but not diffeomorphic.
In the diagram (2) below, which will henceforth be called a ⋆-diagram, P represents a principal G-manifold – a manifold equipped with a free action by a compact Lie group G, denoted by •. This action implies π defines a principal bundle over M with total space P. We also assume the existence of another G-action, denoted by ⋆, which is both free and commutative with •. This action makes π′ a principal bundle over M′ with total space P. We encode everything in the following:
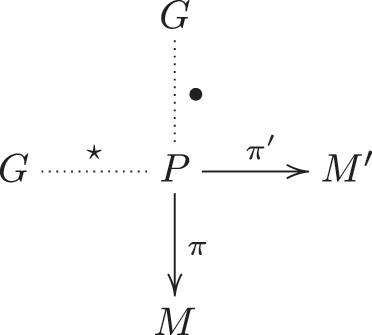
Diagram (2) yields a principal (G, G)-bundle (shortly, a principal G-bundle), [13]. We provide some explicit examples.
Example 1.
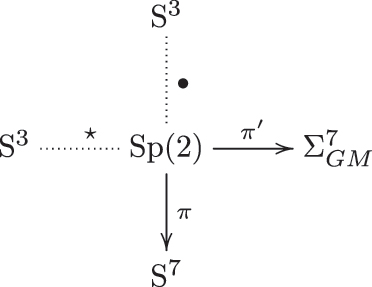
(The Gromoll–Meyer exotic sphere). This construction first appeared in [32] and was first put in a ⋆-diagram in [33] (see also [14]). Consider the compact Lie group
where
Gromoll–Meyer [32] introduced the ⋆-action
whose quotient is an exotic 7-sphere. It all fits in the following diagram
■
As the next example shows, a ⋆-diagram such as (2) does not always produce a different manifold.
Example 2.
(Pairs of diffeomorphic manifolds via ⋆-diagrams). Let M be a smooth manifold with an effective smooth action by a compact Lie group G, which we denote by ⋅. Consider the product manifold M × G with the following ⋆-action
Let • be the following G-action on M × G:
Both •, ⋆ are free and commuting actions on M × G. Orbit maps for such actions are, respectively, π: M × G → M, (x, g′) ↦ x, π′: M × G → M, (x, g′) ↦ (g′)−1 x. We can build the corresponding ⋆-diagram

■
A new construction is given next, encompassing some cohomogeneity-one manifolds.
Example 3.
(Cohomogeneity-one manifolds). Another class of examples are the manifolds constructed in Grove–Ziller [34]. Given integers p
+, q
+, p
−, q
− ≡ 1 (mod 4) [34], produces a cohomogeneity-one manifold

Here,
As observed in [11], the actions • and ⋆ commute so that ⋆ descends to a non-trivial action on M, as well as • descends to a non-trivial action M′. Moreover, it is possible to regard M and M′ with G-invariant Riemannian metrics
Lemma 1.
(Corollary 5.2 in [11]). Let M ← P → M′ shortly denote a ⋆-diagram such as (2) with structure group G. There exists a G × G-invariant metric
Sketch of the Proof.
Let
One straightforwardly checks that
Then, any geodesic orthogonal to an orbit of the ⋆-action on M can be mapped (through horizontal lifting from M and π′-projection) to a geodesic orthogonal to an orbit of the •-action on M′ with the same length. The orbits are totally geodesic on P (for both actions) because Kaluza–Klein metrics are connection metrics.□
Any smooth G × G-invariant function
where H
π
stands for the mean curvature vector of the fibers according to the •-action on P and H
π
′ to the mean curvature vector of the fibers according to ⋆. Since the ring isomorphisms
Consequently,
Problem 2.
Is there
for some
Related to Problem 2 we prove:
Proposition 1.
Let
Proof.
Let Φ be a set of invariant eigenfunctions for
To solve this problem, we consider the functional J
λ
′
(u) ≔ ∫
M
′
|∇′u|2 − λ′∫
M
′
u
2 with domain in
Note that for each p ∈ P we have for every j, n, k that
As appearing in the proof of Lemma 1, the orthogonal spaces to each G-orbit in
Since Φ collects the solutions of Problem 1, the version of the Fubini theorem appearing in [36], Satz 1, p. 210] can be applied to conclude the desired result.□
Definition 4.
Let M ← P → M′ shortly denote a ⋆-diagram. To a set Φ solving Problem 1 in
Our next result shows that when existing a joint invariant eigenfunction set Φ necessarily
Proposition 2.
Let M ← P → M′ shortly denote a ⋆-diagram such as (2) with structure group G where M, P and M′ are closed and connected. Let
Proof.
Observe that the function
On the other hand, Equation (9) ensures that any
Thus, λ′ = λ holds if, and only if, H π − H π ′ ∈ ker dϕ. Fix p ∈ P. The mean curvature vector along the G-orbit through p is given by −H = ∇ log vol(Gp) – [37], Lemma 5.2]. Hence,
so
Therefore,
□
An appearing question is whether we can produce invariant metrics on M and M′, which are invariant and not isospectral. We obtained the following, to be proved in Section 4.
Theorem 2.
For any ⋆-diagram M ← P → M′ with compact connected structure group and M, P and M′ being closed and connected, there exists invariant metrics
The combination of Proposition 1 with Theorem 2 and some explicit realization of exotic manifolds equivariantly related to their classical counterpart allow us to show
Theorem 3.
The following pair of homeomorphic but not diffeomorphic manifolds admit Riemannian metrics invariant by the same group of isometries that can be chosen admitting the same basic spectrum or not:
S 8, Σ8 where Σ8 is the only 8-dimension exotic sphere,
S 10, Σ10 where Σ10 is a generator of the index two homotopy subgroup of 10-dimension homotopy spheres that bound spin manifolds,
S 4n+1, Σ4n+1 where Σ4n+1 are the known Kervaire spheres,
the pair of total spaces of the bundles appearing in Example 3,
the classical and exotic realization of the manifolds appearing in Example 6.
With Theorem 3 in hands, it is natural to ask whether invariant geometric objects ignore the chosen smooth structure to a fixed underlined topological space. We prove
Theorem 4.
(G-invariant Kazdan–Warner problem on ⋆-diagrams). Consider a ⋆-diagram M ← P → M′ with G connected. Then a basic function on M is the scalar curvature of a G-invariant metric on M if and only if it is the scalar curvature of a G-invariant metric on M′ if and only if it lifts to the scalar curvature of a G × G-invariant metric on P.
Corollary 1.
The following pair of homeomorphic but not diffeomorphic manifolds admit the same ring of invariant scalar curvature functions for a certain isometry group:
S 8, Σ8 where Σ8 is the only 8-dimension exotic sphere,
S 10, Σ10 where Σ10 is a generator of the index two homotopy subgroup of 10-dimension homotopy spheres that bound spin manifolds,
S 4n+1, Σ4n+1 where Σ4n+1 are the known Kervaire spheres,
the pair of total spaces of the bundles appearing in Example 3,
the classical and exotic realization of the manifolds appearing in Example 6.
In Section 3, we both prove Theorem 4 and furnish the examples appearing in Theorem 3 and Corollary 1.
3 On the realizability of scalar curvature functions on homotopy spheres
Since Milnor introduced the first examples of exotic manifolds [31], many new exotic spaces have been produced. For instance, there are uncountable many pairwise non-diffeomorphic structures on
The first construction of exotic manifolds uses the classical Reeb’s Theorem to show that specific 7-dimensional total spaces of sphere bundles are homeomorphic to a standard sphere. Moreover, one can recover the smooth structure of a manifold through its space of smooth functions (see, for example, [41], Problem 1-C]). However, in the presence of a ⋆-diagram, the set of basic functions of M and M′ are naturally identified since they are naturally identified with the space of G × G-invariant functions on P, proving that the set of basic functions does not recover (M, G). Theorem 4 reinforces this fact in the sense that invariant scalar curvature functions should not distinguish smooth structures.
Proof of Theorem 4.
Let M ← P → M′ be a ⋆-diagram and p ∈ P. Denote π(p) = x and π′(p) = x′. First, a straightforward calculation shows that the isotropy groups G x and G x′ are isomorphic – [11], Theorem 2.2 and Proposition 5.3]. Therefore, if G acts effectively on M, it does on M′. We now observe that if G has a non-Abelian Lie algebra, then both (M, G), (M′, G) admit any invariant function as scalar curvature of some invariant Riemannian metric. This holds since a non-Abelian Lie algebra ensures the existence of an invariant metric of positive scalar curvature – [40], [42]. The main result in [12] ensures that any scalar curvature function is admissible as scalar curvature of some metric close to this positively curved metric. The arguments in [43] show that the resulting metric is G-invariant.
Finally, if G is Abelian, then it is a torus. Therefore, we can apply [44], Theorem 2.2] to conclude that P admits a G × G-invariant metric with positive scalar curvature if and only if both M and M′ admit G-invariant metrics with positive scalar curvature, as wanted.□
The remaining section presents many examples where Theorems 2–4 can be applied. We explicitly build the examples in the statements of Theorem 3 and Corollary 1.
Example 4.
(Pulling-back ⋆-diagrams). Consider a ⋆-diagram M ← P → M′ and a G-manifold N. Let ϕ: N → M be a G-equivariant function. We can pull-back this ⋆-diagram producing a new quotient (ϕ*P)/G = N′. The pull-back construction was applied in [11], [14] to obtain the following examples:
(Σ8): there is a S3-equivariant suspension η: S8 → S7 of the Hopf map S3 → S2 whose quotient (S8)′ = η*Sp(2)/S3 is the only exotic 8-sphere;
(Σ10): there is a S3-equivariant suspension θ: S10 → S7 of a generator of π 6S3 whose induced ⋆-quotient (S10)′ is a generator of the index two subgroup os homotopy 10-spheres that bound spin manifolds;
(Σ4n+1): the frame bundle pr n : SO(2n + 2) → S2n+1 can be also seen as a ⋆-diagram: one can endow SO(2n + 2) with both the right and left multiplication by SO(2n + 1). In this case, M = M′ = S2n+1. However, there is a pull-back map Jτ: S4n+1 → S2n+1, whose ⋆-diagram S4n+1 ← (Jτ)*SO(2n + 2) → (S4n+1)′ has (S4n+1)′ diffeomorphic to a Kervaire sphere. Moreover, one can ‘reduce’ G = SO(2n + 1) in to either U(n) or Sp(n) (supposing n odd for the last). ■
Example 5.
(Gluing and connected sums). Consider W 1, W 2 manifolds with boundaries and equips with G-actions. Assume that f: ∂W 1 → ∂W 2 is an equivariant diffeomorphism. Then one can produce a new manifold W = W 1 ∪ f W 2 by gluing W 1, W 2 via f. W thus inherits a natural smooth G-action whose restrictions to W 1, W 2 ⊂ W coincide with the original actions.
Interesting examples arise in the following way: let (M
1, G), (M
2, G) be closed manifolds with G-actions. Suppose that x
i
∈ M
i
, i = 1, 2 have the same orbit type, that is,
More generally, one can consider the case where (M, G) admits an equivariant embedding of (S k × D l+1, G), where G acts on S k × D l+1 is equipped with a linear action. In this case, one can perform surgery along ψ. At this point, ⋆-diagrams become quite useful since corresponding orbits in M, M′ often have the same orbit type, as the next lemma points out.
Lemma 2.
Let M ← P → M′ be a ⋆-diagram and p ∈ P. There is a group isomorphism ϕ: G π(p) → G π ′(p) and a linear isomorphism ψ such that ρ π(p) = ψρ π ′(p) ϕ.
Proof.
Denote π(p) = x and π′(p) = x′. For simplicity, we only prove the last assertion since the existence of ϕ follows by direct computation.
Note that dπ p , dπ′ define isomorphisms between normal spaces:
Moreover, since π, π′ commute with the (respective complementary) actions,
inducing the desired identification.□
The isomorphism ϕ in the examples
We claim that several surgeries can be done equivariantly on the manifolds resulting in these examples. Moreover, such surgeries can be done by keeping the ⋆-diagram apparatus. We give more details on the
In this case, S3 acts on S7 as
Note that (a,b)
T
is a fixed point of
To proceed with the surgery process, note that (S7, S3) admits the equivariant submanifolds below. We omit the explicit embeddings and use the representation instead of G as the notation (M, G) to present more detailed information.
Except for S1 × D 6 and S4 × D 3, every submanifold above can lie in an arbitrarily small region of a fixed Re(a). In particular, arbitrarily, many of these surgeries can be performed.
Moreover, we conclude that such surgeries can be performed by preserving infinitely many fixed points. Therefore, the above degree-one map can be considered, producing a ⋆-diagram over the new manifold M. Although the connected sum applied to this context seems ad-hoc, the resulting manifold (ϕ*P)/G = M#Σ is the same manifold one obtains by performing the same surgeries on Σ. ■
Example 6.
(More connected sums). A list of manifolds whose fixed points have isotropy representations isomorphic to the ones of the examples
Proposition 3.
(Cavenaghi–Sperança). The following manifolds have fixed points whose isotropy representations are isomorphic to the ones in
(Σ8): every 3-sphere bundle over S5 or a 4-sphere bundle over S4;
(Σ10):
M 8 × S2 with M 8 as in item (ii);
any 3-sphere bundle over S7, 5-sphere bundle over S5 or 6-sphere bundle over S4;
(Σ4m+1, U(n)):
a sphere bundle S2m ↪ M 4m+1 → S2m+1 associated to any multiple of O(2m + 1) ↪ O(2m + 2) → S2m+1, the frame bundle of S2m+1
a
(Σ8r+5, Sp(r)): M × N 5−k , where N is any manifold and
S4r+k−1 ↪ M 8r+k → S4r+1 is the k-th suspension of the unitary tangent S4r−1 ↪ T 1S4r+1 → S4r+1,
k = 1 and
k = 0 and
k = 1 and M = M 8m+1 is as in item (iv) ■
4 The proof of Theorem 2
In this last section, we prove Theorem 2. Let M ← P → M′ denote a ⋆-diagram with structure group G compact and connected. The manifolds M, M′, and P are assumed to be closed and connected. Assume that
Take
Therefore,
Equation 2.1.4 in [35], Chapter 2, p. 46] ensures that if dimG = k then
where the second equality holds because
Using that
The volume vol
u
(G) is computed regarding each orbit’s induced Riemannian metric by
Therefore, the variational characterization for the first eigenvalue ([23], Section 5]) yields
Thus,
Hence
Finally, one concludes the desired result as we can indiscriminately scale u so that the right-hand side above is strictly lesser than 1.
Funding source: São Paulo Research Foundation (FAPESP)
Award Identifier / Grant number: 22/09603-9, 23/14316-1
Funding source: SNSF-Project
Award Identifier / Grant number: 200020E\_193062
Funding source: DFG-Priority Program
Award Identifier / Grant number: SPP 2026
Funding source: CNPq
Award Identifier / Grant number: 312340/2021-4, 409764/2023-0, 443594/2023-6
Funding source: CAPES MATH AMSUD
Award Identifier / Grant number: 88887.878894/2023-00
Funding source: Paríiba State Research Foundation (FAPESQ)
Award Identifier / Grant number: 3034/2021
Acknowledgments
The authors sincerely thank the anonymous referees for their critical and detailed review, significantly improving the manuscript. They also express their gratitude to Emilio Lauret, whose numerous remarks helped them better acknowledge the existing literature and clarify the results of this paper. Part of this work was conceived while L.F.C was a postdoctoral researcher at the University of Fribourg, Switzerland, and he is grateful to Prof. Anand Dessai for his support and confidence during that time.
-
Research Ethics: Not applicable.
-
Informed consent: All authors consent to participate in this work.
-
Author contributions: All authors contributed to the study conception and design. All authors performed material preparation, data collection, and analysis. The authors read and approved the final manuscript.
-
Use of Large Language Models, AI and Machine Learning Tools: Not applicable.
-
Conflict of interest: The authors declare no conflict of interest.
-
Research funding: L. F. Cavenaghi acknowledges The São Paulo Research Foundation (FAPESP), grants no 22/09603-9, 23/14316-1 and the SNSF-Project 200020E\_193062 and the DFG-Priority Program SPP 2026, which supported him while a postdoc at the University of Fribourg, where part of this work was conceived. J. M. do Ó acknowledges partial support from CNPq through grants 312340/2021-4, 409764/2023-0, 443594/2023-6, CAPES MATH AMSUD grant 88887.878894/2023-00and Para\'iba State Research Foundation (FAPESQ), grant no 3034/2021.
-
Data availability: All data generated or analyzed during this study are included in this article.
References
[1] M. Kac, “Can one hear the shape of a drum?” Am. Math. Mon., vol. 73, no. 4, pp. 1–23, 1966. https://doi.org/10.1080/00029890.1966.11970915.Search in Google Scholar
[2] P. Buser, “The spectrum of the laplacian of a Riemann surface and the Siegel conjecture,” Comment. Math. Helv., vol. 56, no. 2, pp. 199–214, 1982.Search in Google Scholar
[3] C. Gordon, D. L. Webb, and S. Wolpert, “One cannot hear the shape of a drum,” Bull. Am. Math. Soc., vol. 27, no. 1, pp. 134–138, 1992. https://doi.org/10.1090/s0273-0979-1992-00289-6.Search in Google Scholar
[4] C. Gordon and L. D. Webb, “You can’t hear the shape of a drum,” Am. Sci., vol. 84, no. 1, pp. 46–55, 1996.Search in Google Scholar
[5] E. A. Lauret and J. S. Rodríguez, “Spectrally distinguishing symmetric spaces I,” arXiv eprint, 2311.09719, 2023.Search in Google Scholar
[6] J. Milnor, “Eigenvalue problems on symmetric Riemannian manifolds,” Proc. Natl. Acad. Sci. U. S. A., vol. 51, no. 4, pp. 1054–1056, 1964.Search in Google Scholar
[7] J. Milnor, “Eigenvalues of the Laplace operator on certain manifolds,” Proc. Natl. Acad. Sci. U. S. A., vol. 51, no. 4, pp. 542–544, 1964. https://doi.org/10.1073/pnas.51.4.542.Search in Google Scholar PubMed PubMed Central
[8] S. Tanno, “Eigenvalues of the laplacian of riemannian manifolds,” Tohoku Math. J., vol. 25, no. 3, pp. 391–403, 1973. https://doi.org/10.2748/tmj/1178241341.Search in Google Scholar
[9] S. Tanno, “The first eigenvalue of the laplacian on spheres,” Tohoku Math. J., vol. 31, no. 2, 1979. https://doi.org/10.2748/tmj/1178229837.Search in Google Scholar
[10] S. Tanno, “Some metrics on a (4r + 3)-sphere and spectra,” Tsukuba J. Math., vol. 4, no. 1, pp. 99–105, 1980. https://doi.org/10.21099/tkbjm/1496158796.Search in Google Scholar
[11] L. F. Cavenaghi and L. D. Sperança, “On the geometry of some equivariantly related manifolds,” Int. Math. Res. Not., vol. 2020, no. 23, pp. 9370–9768, 2020. https://doi.org/10.1093/imrn/rny268.Search in Google Scholar
[12] J. L. Kazdan and F. W. Warner, “A direct approach to the determination of Gaussian and scalar curvature functions,” Invent. Math., vol. 28, pp. 227–230, 1975. https://doi.org/10.1007/bf01425558.Search in Google Scholar
[13] C. Blohmann, “Stacky lie groups,” Int. Math. Res. Not., 2008, Art. no. rnn082. https://doi.org/10.1093/imrn/rnn082.Search in Google Scholar
[14] L. Sperança, “Pulling back the Gromoll–Meyer construction and models of exotic spheres,” Proc. Am. Math. Soc., vol. 144, no. 7, pp. 3181–3196, 2016. https://doi.org/10.1090/proc/12945.Search in Google Scholar
[15] L. F. Cavenaghi, L. Gramma, and L. Katzarkov, “New look at milnor spheres,” arXiv eprint, 2404.19088, 2024.Search in Google Scholar
[16] M. Hilsum and G. Skandalis, “Morphismes K-orientés d’espaces de feuilles et functorialité en théorie de Kasparov,” Ann. Sci. Ec. Norm. Super., vol. 20, no. 3, pp. 325–390, 1987. https://doi.org/10.24033/asens.1537.Search in Google Scholar
[17] A. Haefliger, “Groupoïdes d’holonomie et classifiants,” Astérisque, vol. 116, pp. 70–97, 1984.Search in Google Scholar
[18] P. Tondeur, Geometry of Foliations, Basel, Birkhäuser, 1997.10.1007/978-3-0348-8914-8Search in Google Scholar
[19] K. Richardson, “The transverse geometry of G-manifolds and Riemannian foliations,” Ill. J. Math., vol. 45, no. 2, pp. 517–535, 2001. https://doi.org/10.1215/ijm/1258138353.Search in Google Scholar
[20] M. M. Alexandrino and F. Caramello, “Leaf closures of Riemannian foliations: a survey on topological and geometric aspects of Killing foliations,” Expo. Math., vol. 40, no. 2, pp. 177–230, 2022. https://doi.org/10.1016/j.exmath.2021.11.002.Search in Google Scholar
[21] Y. Lin and R. Sjamaar, “Cohomological localization for transverse Lie algebra actions on Riemannian foliations,” J. Geom. Phys., vol. 158, 2020, Art. no. 103887. https://doi.org/10.1016/j.geomphys.2020.103887.Search in Google Scholar
[22] E. Hebey, “Sobolev spaces,” in Sobolev Spaces on Riemannian Manifolds. Lecture Notes in Mathematics, vol. 1635, Berlin, Heidelberg, Springer, 1996.10.1007/BFb0092907Search in Google Scholar
[23] I. Chavel, B. Randol, and J. Dodziuk, Eds. Pure and Applied Mathematics, Chapter I – The Laplacian, vol. 115, Amsterdam, Elsevier, 1984, pp. 1–25.Search in Google Scholar
[24] R. Palais, “The principle of symmetric criticality,” Commun. Math. Phys., vol. 69, no. 1, pp. 19–30, 1979. https://doi.org/10.1007/bf01941322.Search in Google Scholar
[25] E. B. Dryden, V. Guillemin, and R. Sena-Dias, “Equivariant inverse spectral theory and toric orbifolds,” Adv. Math., vol. 231, nos. 3–4, pp. 1271–1290, 2012.10.1016/j.aim.2012.06.018Search in Google Scholar
[26] C. J. Sutton, “Equivariant isospectrality and sunada’s method,” Arch. Math., vol. 95, no. 1, pp. 75–85, 2010. https://doi.org/10.1007/s00013-010-0139-8.Search in Google Scholar
[27] I. M. Adelstein and M. R. Sandoval, “The G-invariant spectrum and non-orbifold singularities,” Arch. Math., vol. 109, no. 6, pp. 563–573, 2017. https://doi.org/10.1007/s00013-017-1089-1.Search in Google Scholar
[28] T. Sunada, “Riemannian coverings and isospectral manifolds,” Ann. Math., vol. 121, no. 1, pp. 169–186, 1985. https://doi.org/10.2307/1971195.Search in Google Scholar
[29] C. J. Sutton, “Isospectral simply-connected homogeneous spaces and the spectral rigidity of group actions,” Comment. Math. Helvetici, vol. 77, no. 4, pp. 701–717, 2002. https://doi.org/10.1007/pl00012438.Search in Google Scholar
[30] L. Cavenaghi and L. Sperança, “Positive Ricci curvature on fiber bundles with compact structure group,” Adv. Geom., vol. 22, no. 1, pp. 95–104, 2022. https://doi.org/10.1515/advgeom-2021-0007.Search in Google Scholar
[31] J. Milnor, “On manifolds homeomorphic to the 7-sphere,” Ann. Math., vol. 64, no. 2, pp. 399–405, 1956. https://doi.org/10.2307/1969983.Search in Google Scholar
[32] D. Gromoll and W. Meyer, “An exotic sphere with nonnegative curvature,” Ann. Math., vol. 96, 1972.Search in Google Scholar
[33] C. Durán, “Pointed wiedersehen metrics on exotic spheres and diffeomorphisms of S6,” Geom. Dedicata, vol. 88, nos. 1–3, pp. 199–210, 2001.10.1023/A:1013163427655Search in Google Scholar
[34] K. Grove and W. Ziller, “Curvature and symmetry of milnor spheres,” Ann. Math., vol. 152, no. 1, pp. 331–367, 2000. https://doi.org/10.2307/2661385.Search in Google Scholar
[35] D. Gromoll and G. Walshap, Metric Foliations and Curvature, Basel, Birkhäuser, 2009.10.1007/978-3-7643-8715-0Search in Google Scholar
[36] R. Sulanke and P. Wintgen, Differentialgeometrie und Faserbundel, Boston, Math. Reihe Series, Birkhauser, 1980.Search in Google Scholar
[37] M. Alexandrino and M. Radeschi, “Mean curvature flow of singular Riemannian foliations,” J. Geom. Anal., vol. 26, no. 3, pp. 2204–2220, 2016. https://doi.org/10.1007/s12220-015-9624-4.Search in Google Scholar
[38] C. Taubes, “Gauge theory on asymptotically periodic 4-manifolds,” J. Differ. Geom., vol. 25, no. 3, pp. 363–430, 1987. https://doi.org/10.4310/jdg/1214440981.Search in Google Scholar
[39] N. Hitchin, “Harmonic spinors,” Adv. Math., vol. 14, no. 1, pp. 1–55, 1974. https://doi.org/10.1016/0001-8708(74)90021-8.Search in Google Scholar
[40] L. F. Cavenaghi, R. J. M. e Silva, and L. D. Sperança, “Positive ricci curvature through cheeger deformations,” Collect. Math., vol. 75, pp. 481–510, 2024. https://doi.org/10.1007/s13348-023-00396-7.Search in Google Scholar
[41] J. W. Milnor and J. D. Stasheff, Characteristic Classes, Princeton, Princeton University Press, 1974.10.1515/9781400881826Search in Google Scholar
[42] H. Lawson and S.-T. Yau, “Scalar curvature, non-abelian group actions, and the degree of symmetry of exotic spheres,” Comment. Math. Helv., vol. 49, pp. 232–244, 1974. https://doi.org/10.1007/bf02566731.Search in Google Scholar
[43] L. F. Cavenaghi, J. M. do Ó, and L. D. Sperança, “The Kazdan–Warner problem with (and via) symmetries,” arXiv eprint, 2106:14709, 2023.Search in Google Scholar
[44] M. Wiemeler, “Circle actions and scalar curvature,” Trans. Am. Math. Soc., vol. 368, no. 4, pp. 2939–2966, 2016. https://doi.org/10.1090/tran/6666.Search in Google Scholar
© 2024 the author(s), published by De Gruyter, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Frontmatter
- Editorial
- Preface for the special issue on geometric and functional inequalities and applications
- Research Articles
- Invariance of intrinsic hypercontractivity under perturbation of Schrödinger operators
- Minimizing Schrödinger eigenvalues for confining potentials
- An eigenvalue estimate for self-shrinkers in a Ricci shrinker
- Talenti comparison results and rigidity results for anisotropic p-Laplacian operator with Robin boundary conditions
- Comparing three possible hypoelliptic Laplacians on the 5-dimensional Cartan group via div-curl type estimates
- Hearing exotic smooth structures
- Hardy inequalities with Bessel pair for Dunkl operator
- An elliptic problem involving critical Choquard and singular discontinuous nonlinearity
- Asymptotic behaviors of least energy solutions for weakly coupled nonlinear Schrödinger systems
- A curl-free improvement of the Rellich–Hardy inequality with weight
- On singularly perturbed (p, N)-Laplace Schrödinger equation with logarithmic nonlinearity
Articles in the same Issue
- Frontmatter
- Editorial
- Preface for the special issue on geometric and functional inequalities and applications
- Research Articles
- Invariance of intrinsic hypercontractivity under perturbation of Schrödinger operators
- Minimizing Schrödinger eigenvalues for confining potentials
- An eigenvalue estimate for self-shrinkers in a Ricci shrinker
- Talenti comparison results and rigidity results for anisotropic p-Laplacian operator with Robin boundary conditions
- Comparing three possible hypoelliptic Laplacians on the 5-dimensional Cartan group via div-curl type estimates
- Hearing exotic smooth structures
- Hardy inequalities with Bessel pair for Dunkl operator
- An elliptic problem involving critical Choquard and singular discontinuous nonlinearity
- Asymptotic behaviors of least energy solutions for weakly coupled nonlinear Schrödinger systems
- A curl-free improvement of the Rellich–Hardy inequality with weight
- On singularly perturbed (p, N)-Laplace Schrödinger equation with logarithmic nonlinearity