Magnetic torque-driven deformation of Ni-nanorod/hydrogel nanocomposites
-
Kerstin Birster


Abstract
Nickel (Ni) nanorods were prepared by the anodized aluminum oxide (AAO) template method and dispersed in poly(acrylamide) (PAM) hydrogels. The deformation of the magnetoresponsive composites was studied with particular attention to the consequences of finite magnetic shape anisotropy as compared to rigid dipoles on the field-dependent torque. For comparison with experiments, the composite was described as an elastic continuum with a local magnetic torque density, applied by discrete particles and determined by the local orientation of their magnetic anisotropy axis with respect to the magnetic field. The mean magnetic moment of the single domain particles m and their volume density in the composite φ vol were derived from the static field-dependent optical transmission (SFOT) of linear polarized light. The mechanical coupling between the particles and their viscoelastic environment was retrieved from the rotational dynamics of the nanorods using oscillating field-dependent optical transmission (OFOT) measurements. Field- and orientation-dependent magnetization measurements were analyzed using the Stoner–Wohlfarth (SW) model and a valid parameter range was identified by introducing an effective anisotropy constant K A as a new empirical model parameter. This adapted SW-model for quantitative description of the field- and orientation dependence of the magnetic torque was validated by measuring the local rotation of nanorods in a soft elastic hydrogel. Finally, torsional and bending deformation of thin magnetically textured composite filaments were computed and compared with experiments.
1 Introduction
Dispersing magnetic particles in a nonmagnetic matrix enables the transmission of forces and torques to the material without contact. In a mechanically soft environment, the propulsion of the magnetic inclusions entails elastic deformations and such composites constitute a particular class of shape-programmable matter. Compared to other possible stimuli, magnetic actuation stands out because—in principle—complex deformation patterns can be achieved by a suitable combination of composite structure and time-variable magnetic field [1], [2], [3], [4], [5], [6]. The versatility of possible motion patterns depends first of all on the magnetic properties of the particles. Soft magnetic ferrite microparticles, commonly used in magnetorheological elastomers (MRE) [7], adopt a multi-domain structure with vanishing remanence. The magnetization of such particles increases and finally saturates with increasing applied field. Deformations are controlled by magnetic dipolar interactions between the inclusions [8] and limited to axial elongation and compression of the composite. Linear stretching and contraction was also observed in ferrogels, in which the mechanical compliance of the hydrogel matrix is adapted to the lower magnetic dipolar forces between the ferrite nanoparticles [9]. The magnetoelastic coupling on the microscopic scale and its consequences on the macroscopic response of such composite materials is the topic of several chapters in the present volume.
In order to fully exploit the potential of magnetic actuation, however, it is necessary to apply magnetic forces as well as torques. The latter requires a significant magnetic anisotropy. Using soft magnetic multidomain or superparamagnetic nanoparticles, anisotropy was achieved by field-induced self-organization of the particles into linear aggregates in the liquid precursor state of the composite, which was then frozen during solidification [4], [6], [10]. An alternative and direct approach is the use of hard ferromagnetic particles with high remanence and coercivity [11], [12]. Programming the desired shape variation then involves the computation of the density and orientation distribution of magnetic particles. A corresponding methodology was derived for the case of non-interacting magnetic dipoles in an elastic continuum [2]. Magnetically responsive soft materials with programmed texture were fabricated using a two-step molding process [2] or 3D-printing of ferromagnetic domains [13].
A direct coupling between rigid magnetic dipoles and the elastic continuum is an adequate approximation for hard ferromagnetic particles and driving fields far below their coercivity [14]. In the general case of finite magnetic anisotropy, however, the magnetic moments rotate out of the anisotropy axes, which reduce the magnetic torque per particle as compared to a rigid dipole. The present chapter reviews recent studies on the effect of finite magnetic anisotropy on the torque-based deformation of Ni-nanorod/hydrogel composites. Due to their size and shape, the Ni nanorods are uniaxial ferromagnetic single domain particles with a total magnetic moment preferably oriented along the cylinder axis. By alignment of nanorods in the liquid precursor solution and during the polymerization process of the hydrogel network, textured nanocomposites can be obtained. These materials allow detailed studies on the magnetic anisotropy of the nanorods and the torque-driven local rotation in a soft elastic environment. The central part is devoted to a quantitative semi-empirical model for the field- and angular dependence of the magnetic torque acting on the Ni nanorods. Model calculations are compared with experimental results of the field-dependent torsion and bending of textured Ni-nanorod/hydrogel filaments.
2 Synthesis and physical properties of Ni nanorods
2.1 Synthesis
The synthesis of Ni nanorods makes use of anodized aluminum oxide (AAO) templates with a regular cylindrical pore structure [15], [16], [17], Figure 1 (left). Anodization of electropolished aluminum foils in 1 M H2SO4 at U = 15 V, following the two-step procedure by Masuda and Satoh [18], and further processing in 0.1 M H3PO4 [19] provided an oxide layer with ordered cylindrical channels and a mean pore diameter D p ≈ 20 nm, Figure 1 (left/top). The nanopores were filled with Ni by pulsed electrodeposition [20] which allowed the variation of the rod length by controlling the number of current pulses [17], Figure 1 (left/middle). The alumina templates were slowly dissolved in dilute NaOH solution at pH 11.5 to which poly(vinylpyrrolidone) (PVP) was added to prevent strong aggregation of the nanoparticles, Figure 1 (left/bottom). The nanorod dispersions were purified by repeated centrifugation and redispersion in bi-distilled water. For dispersion in PAM precursor solution, the nanorods were further functionalized with poly(acrylic acid) and stabilized at pH 8. Details on the synthesis protocol can be found in references [16], [17], [21].

The synthesis of Ni nanorods involves the preparation of nanoporous aluminum oxide templates by anodic oxidation (left/top), pulsed electrodeposition of Ni (left/middle), and release of the nanorods by dissolution of the oxide template in the presence of PVP surfactant (left/bottom). TEM images of short (middle) and long (right) Ni nanorods reveal their cylindrical shape but also irregular structures (dendrites) as well as residues of the alumina template at the particle surface.
Poly(acrylamide) (PAM) hydrogels were used as soft elastic matrix for the composite materials. The stiffness could be adjusted by varying the amount of a monomer stock solution (27 wt% acrylamide and 0.364 wt% N,N′-methylenebisacrylamide) in the precursor mixture. Copolymerization was started by adding the catalyst 0.2 wt% N,N,N′,N′-tetramethylethylenediamine (TEMED) and the initiator 0.18 wt% ammonium persulfate (APS). For fabrication of magnetically textured composites, the nanorod-precursor solution was exposed to a static magnetic field and the aligned nanorods were fixed during polymerization.
2.2 Structure
Transmission electron microscopy (TEM) images provide detailed information about the structure of the metallic Ni core. The majority of particles exhibited a linear cylindrical shape with core length L c and diameter D c , Figure 1 (middle and right). Occasionally there were also irregular structures such as kinks and branches into dendrites. Besides the Ni core with its nanocrystalline substructure, TEM images also revealed a faint contrast at the particle surface which was attributed to oxide residues from the alumina templates [17].
Colloids with different mean lengths of the nanorods in the range of
2.3 Magnetic anisotropy
According to micromagnetic simulations, cylindrical Ni nanorods adopt a single domain state below a critical diameter
Due to their large magnetic moment Ni nanorods can be readily aligned by an external magnetic field when suspended in a liquid [26]. This aligned state can be preserved if the precursor of a hydrogel is dissolved in the same liquid volume and polymerized in the presence of the alignment field. The obtained textured nanorod/hydrogel composite with particles fixed in a rigid matrix allowed the investigation of their anisotropic magnetic properties. For ferrogels with uniaxial anisotropy, the experimental results agreed qualitatively with the predictions of the SW-model, e.g., with regard to the single domain state and the angular dependence of the relative remanence m r /m s [15]. However, reliable prediction of magnetic actuation requires a model that is also quantitatively consistent. With this specific objective, the field- and angular dependence of reversible magnetization changes (magnetic moment remains in the same local energy minimum) on the one hand and the angular dependence of irreversible switching (magnetic moment changes to the energy minimum in the opposite direction) on the other hand are the most important issues [16], [27].
According to the SW-model, the hysteresis cycle of uniaxial ferromagnets involves both irreversible (switching) and reversible magnetization changes. In particular, the reversible magnetization properties are revealed by the upper branches of the hysteresis curves in the first quadrant measured at different angles Θ between the texture axis and the direction of the applied field, Figure 2 (left). The reversible magnetization could be consistently described by the SW-model for all angles Θ ≤ 70° when the theoretical anisotropy constant K
s
= 73 kJ/m3 for an idealized spheroid was replaced by a slightly smaller empirical effective anisotropy constant K
A
= 63 kJ/m3 [27]. The result from a simultaneous regression analysis is shown in Figure 2 (left). The consistency of the SW-model, however, did not hold for Θ > 70°. In particular, the prediction of the SW-model for Θ = 90° is a linear increase in magnetization up to the coercive field with constant normalized susceptibility

Magnetization of Ni-nanorods aligned and fixed in a rigid gelatin matrix: (left) upper branches of hysteresis curves measured at different texture angles Θ ≤ 70° could be consistently described by the SW-model (solid lines) using an effective anisotropy constant K A = 63 kJ/m3. The measurement at Θ = 90° (black dots, insert) did not show the expected linear increase but could be reproduced by introducing a distribution of magnetic anisotropy constants. (right) The critical switching field H sw was much lower than the prediction by the SW-model, particularly at Θ = 180°. A critical threshold field, at which 10% of the nanorods were irreversibly remagnetized, was obtained at ≈ 600 Oe (dashed line).
Irreversible switching of the magnetization results in a reversal of the magnetic torque direction. In most cases, this effect is counterproductive for torque-driven magnetic actuation. To prevent such magnetization reversal the applied field should remain below a critical threshold, determined by the switching field distribution of the magnetic particles. The SW-model does not offer useful guidance in this aspect. The prediction for the switching field at Θ = 180°,
2.4 Optical anisotropy
The field-induced alignment of Ni nanorods in a liquid dispersion medium was revealed in the Langevin-type normalized magnetization

(left) Static field-dependent optical transmission (SFOT), normalized to the transmission at zero field, for polarization perpendicular (upper branch) and parallel (lower branch) to the magnetic field. Regression analysis provided the mean magnetic moment per particle
Quantitative analysis of absolute transmittance data indicated the presence of an additional contribution to optical extinction, which was independent of the magnetic field [33]. This contribution was attributed to magnetic-optically inactive aggregates of Ni nanorods, e.g., nanorod dimers with compensating anti-parallel magnetic moments. An increasing contribution of this extinction background and correlated decrease of field-dependent optical extinction by individual nanorods was observed after destabilization of a nanorod colloid by the addition of salt. The time-dependence of the extinction components could be described with the Smoluchowski coagulation model [33].
With increasing magnetic field, the transmission saturates as all nanorods in the colloid align along the field. At a sufficiently large value of the Langevin parameter, e.g., ζ > 30, the transmitted intensity depends on the orientation angle of the rod axis with respect to polarization direction as
3 Particle-matrix mechanical coupling
The magnetic hysteresis observed with Ni nanorod hydrogels as compared to the superparamagnetic behavior in a liquid medium points to the influence of the matrix properties on the magnetization behavior. Lowering the gelatine content in a hydrogel resulted in an increase in the initial susceptibility [15]. This effect was attributed to the additional torque-driven rotation of the nanorod axis into field direction enabled by the mechanical compliance of the matrix. Systematic changes in the hysteresis of an isotropic nanorod/hydrogel composite, in particular a decrease in coercivity, could be described by an extended SW-model, which included an additional term associated with the deformation energy of the elastic matrix,
with the condition

Definitions of angle variables: ϕ, between the direction of the magnetic moment
Significant field-induced deformations of actuators require adjustment of the matrix stiffness to the magnetic forces and torques acting on the magnetic inclusions. With regard to Ni nanoparticles at moderate volume fraction, this could be achieved by using soft hydrogels. However, the concomitant mesh size of the polymeric network,
Particle/matrix mechanical interaction of Ni nanorods in Newtonian fluids was investigated using AC magnetization measurements, dynamical light scattering and optical transmission in a rotating magnetic field [31]. The rotational diffusion coefficients D
r
, obtained from nanorod colloids with average length ⟨L
c
⟩ = 100–240 nm showed good agreement. Yet, the absolute values were smaller than expected from their geometric size by a factor ∼2 independent of the method. The AC susceptibility of blocked magnetic dipoles in a Newtonian fluid monitors Brownian relaxation with the characteristic frequency
The transfer of both types of driving fields, alternating or rotating, to investigate rotational relaxation of nanorod dispersions in general viscoelastic media is not straightforward. Theoretical models for the dynamics of magnetic dipoles in canonical Maxwell-[43], Voigt-Kelvin or Jeffrey [44], [45] materials were developed and used for analysis of AC susceptibility of CoFe2O4 nanoparticles in the low field limit [46], [47]. A model-independent analysis was derived from the Di Marzio–Bishop model for the dielectric susceptibility of viscoelastic glasses and applied in the analysis of low field magnetic AC susceptibility of CoFe2O4 particles in PEG solutions [48]. An alternative, favorable in particular for probe particles with large magnetic moment, is the use of an oscillating driving field, i.e., a field of constant magnitude H
0 close to saturation at Langevin parameter ζ > 30. The direction of the field vector, described by the time-dependent angle
that was assumed to be characteristic for a particular batch of nanorods. For the analysis of OFOT measurements, P(K) was calibrated by a reference measurement in a Newtonian fluid with

(left) OFOT response function of Ni nanorods in water for calibration. The distribution function P(K) (insert) was derived by numerical inversion and used to translate the OFOT spectrum (right) of nanorods in a PEG solution (loglog-plot) into the dynamic modulus G * (insert).
Using eq. (2), the OFOT response function of a nanorod dispersion in a 1.6 wt% poly(ethylene oxide) (PEO,
OFOT measurements and their analysis based on eq. (2) make it possible to observe the capture of Ni nanorods in the hydrogel’s polymeric network during copolymerization of the acrylamide/bis-acrylamide precursor solution, Figure 6 (left). Only a few seconds after addition of the initiator APS, polymerization was evident from the rapid increase in the dynamic modulus. The crossover between storage and loss modulus indicated the formation of an elastic crosslinked PAM network. After the hydrogel matrix had reached a stable elasticity, the mechanical particle/matrix coupling could also be investigated by quasistatic field-dependent optical transmission measurements of linear polarized light as described in Section 2.4. The rotation angle ϑ increased proportional to the magnetic torque T, as expected for a linear elastic matrix. The shear modulus could be calculated from the slope,

(left) Dynamic modulus at f = 10 Hz during chemical gelation of PAM at a composition of 16 wt% stock solution after addition of initiator APS. (right) Rotation angle of nanorods in PAM hydrogels with different amount of stock solution as function of magnetic torque (see Section 4) and derived shear modulus in comparison with results from macroscopic shear rheometry (Thermo Fisher Scientific HAAKE MARS II, CP60/2°).
4 Magnetic torque
While magnetization measurements as shown in Section 2.3 characterized the magnetization of the magnetic particles in field direction, m
||, the magnetic torque on a single nanorod is determined by the component of its magnetic moment perpendicular to the applied field,
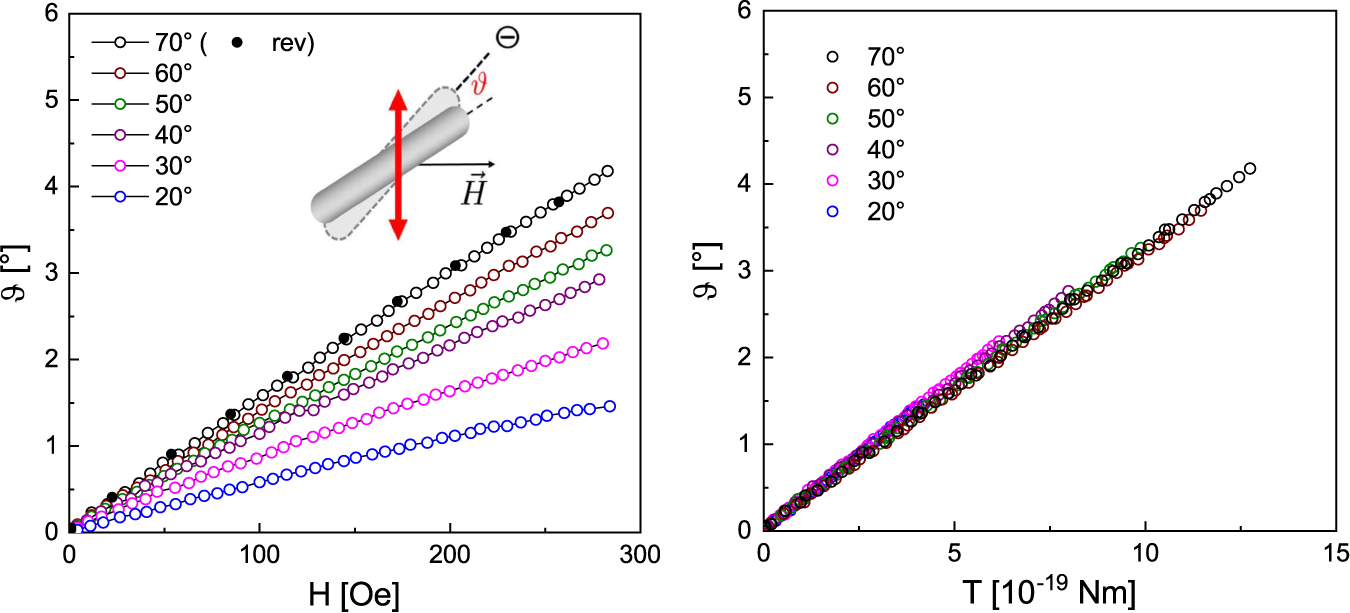
(left) Nanorod rotation angle ϑ as function of applied magnetic field H for different angles Θ between the texture axis and field direction. For maximum sensitivity, polarization of the laser was at 45° with respect to Θ. The rotation was reversible during the experiment indicated by the reverse curve (70°, black markers). (right) The same data, plotted as function of the magnetic torque, fell on a common master curve.
5 Particle density
The field-induced change in mechanical stiffness (magnetorheological effect) and deformation (magnetostrictive effect) of magnetic gels and elastomers depend sensitively on the local particle arrangement and the resulting balance of magnetic and elastic forces on the microscopic scale [8], [50], [51], [52], [53]. Alignment of particles and formation of closely packed particle chains along the field direction has an important impact on the mechanical properties [54] but—in comparison to a liquid environment—is hampered by the elastic restoring forces. Particular features of the magnetoelastic balance are the occurrence of two metastable states [55] with a resulting hysteretic behavior [56], [57] and magnetic field-dependent plasticity in soft elastomers [58]. Further interparticle effects arise from the inhomogeneous local magnetic field in the vicinity of a magnetic particle. The feedback in dipolar interactions and local structure results in a strong and complex coupling of the elastic strain and magnetic fields, which were computed by FEM simulations and used to calibrate macroscopic constitutive equations [59]. Finally, elastic interaction, mediated by the overlapping deformation fields of neighboring particles also affect their relative motion [60], [61], [62]. In order to minimize interference by the very complex magnetomechanical interparticle interactions, the experimental studies on Ni nanorod/hydrogel composites were performed at particle concentrations of
The rotation of Ni nanorods in a series of soft PAM-composites with identical gel composition was virtually independent of particle volume fraction in the range
6 Macroscopic deformation experiments
With regard to the weak total torque expected for a Ni nanorod volume fraction of φ vol ≈ 10−4, experiments were performed on thin composite filaments, taking advantage of the high sensitivity of this geometry [21]. The magnetically textured PAM-nanorod filaments were fabricated by mixing the nanorods in a precursor solution and sucking the solution into a thin PTFE tube immediately after starting the polymerization process by addition of APS. Guided by the information on the polymerization kinetics, Figure 6, the specimens were mounted in the magnetic assembly for alignment of the nanorods within a few seconds and left for 15 min. For deformation measurements, the composite filaments were pushed out of the tube, suspended at the top end either in a sealed chamber or immersed in water to minimize gravitational effects. The deformation in a horizontal homogeneous magnetic field, i.e., perpendicular to the filament axis, were quantified by analysis of recorded video images.
Experimental results were compared with calculations for an elastic thin cylinder with volume distributed magnetic torque density
is an ordinary differential equation, derived from the St. Venant torsion or Euler–Bernoulli bending of a thin cylinder with volume distributed torque. The prefactor depends on the problem,

(left) Configuration of two rows of permanent magnets used for fabrication of a textured bending composite inside the dashed area. Texture angle Θ is indicated by red arrows. (middle) Calculated deflection of a Ni-nanorod/PAM-composite (
Various profiles Θ(s) for the orientation of the anisotropy axis were imprinted by polymerization in static magnetic fields of specific geometry. Ni-nanorod/PAM-composites with homogeneous texture perpendicular to the filament axis were prepared and the field-dependent torsion measured. The nonlinear increase of the total torsion angle, observed in experiment, was reproduced by the model calculations. The results were also consistent for different orientations of the texture axis [21].
In a second example, a profile with sinusoidal modulation of the texture axis was prepared using two rows of NdFeB permanent magnets, magnetized in the same direction and mutually shifted by half the spacing, Figure 8 (left). The magnetic field was characterized by motorized scanning with transversal and longitudinal Hall probes. By adjusting the spacing z m between the permanent magnets and the separation x m of the two rows, a sinusoidal modulation of the field direction was achieved, with maximum values of about 80° and −80° with respect to the horizontal, shown in Figure 8 (left) by red arrows. In a horizontal homogeneous magnetic field of 146 mT, the composite showed a sinusoidal bending, which was well reproduced by the model calculation, Figure 8 (middle). The extended SW-model allowed a more detailed analysis of the underlying physical effects. In particular, the various contributions to the rotation of the magnetic moment toward the field direction, which determines the magnetic torque, could be broken down, Figure 8 (right). The combined local rotation of the nanorods by ϑ and deflection of the magnetic moment from the anisotropy axis by ψ were of similar magnitude as the macroscopic bending angle ω. The computed deflection for rigid dipole are also plotted as dashed line in Figure 8 (middle) and obviously overestimated the magnetic torque. As pointed out by these results, deflection of the magnetic moment and local rotation of the active particles is not negligible in magnetoelastic soft composites of particles with finite magnetic anisotropy in a matix with low elastic modulus.
7 Conclusions
Ni nanorods, synthesized by the AAO-template method, were used as magnetic phase in magnetoresponsive hydrogels. The magnetization was analyzed using the Stoner–Wohlfarth model and an empirical anisotropy constant derived. Taking advantage of the nanorods’ optical anisotropy, transmission measurements in static and time-dependent magnetic fields enabled the characterization of the nanorods’ mean magnetic moment, concentration and the hydrodynamic particle–matrix interaction. Optical measurements of local nanorod rotation in a soft elastic matrix verified the SW-model for prediction of the magnetic torque in a restricted parameter range. Comparison of model calculations with macroscopic deformation experiments on thin composite filaments revealed a significant effect of the finite magnetic anisotropy and local particle rotation on the magnetic torque.
Funding source: Deutsche Forschungsgemeinschaft
Award Identifier / Grant number: TS62/4-3
Acknowledgment
We thank C. Wagner, Physics Department, Saarland University, Germany, for access to the rheometer equipment. This work was financially supported by the German National Science Foundation DFG (Priority program SPP 1681, grant TS62/4-3).
-
Author contribution: All the authors have accepted responsibility for the entire content of this submitted manuscript and approved submission.
-
Research funding: This article was supported by German National Science Foundation DFG (Priority program SPP 1681, grant TS62/4-3).
-
Conflict of interest statement: The authors declare no conflicts of interest regarding this article.
References
1. Szabó, D, Szeghy, G, Zrínyi, M. Shape transition of magnetic field sensitive polymer gels. Macromolecules 1998;31:6541–8. https://doi.org/10.1021/ma980284w.Search in Google Scholar
2. Lum, GZ, Ye, Z, Dong, X, Marvi, H, Erin, O, Hu, W, et al.. Shape-programmable magnetic soft matter. Proc Natl Acad Sci 2016;113:E6007–15. https://doi.org/10.1073/pnas.1608193113.Search in Google Scholar PubMed PubMed Central
3. Tokarev, I, Minko, S. Stimuli-responsive hydrogel thin films. Soft Matter 2009;5:511–24. https://doi.org/10.1039/b813827c.Search in Google Scholar
4. Kim, J, Chung, SE, Choi, S-E, Lee, H, Kim, J, Kwon, S. Programming magnetic anisotropy in polymeric microactuators. Nat Mater 2011;10:747–52. https://doi.org/10.1038/nmat3090.Search in Google Scholar PubMed
5. Diller, E, Zhuang, J, Zhan Lum, G, Edwards, MR, Sitti, M. Continuously distributed magnetization profile for millimeter-scale elastomeric undulatory swimming. Appl Phys Lett 2014;104:174101. https://doi.org/10.1063/1.4874306.Search in Google Scholar
6. Huang, H-W, Sakar, MS, Petruska, AJ, Pané, S, Nelson, BJ. Soft micromachines with programmable motility and morphology. Nat Commun 2016;7:12263. https://doi.org/10.1038/ncomms12263.Search in Google Scholar PubMed PubMed Central
7. Jolly, MR, Carlson, JD, Munoz, BC. A model of the behaviour of magnetorheological materials. Smart Mater Struct 1996;5:607. https://doi.org/10.1088/0964-1726/5/5/009.Search in Google Scholar
8. Zubarev, A. Magnetodeformation of ferrogels and ferroelastomers: effect of microstructure of the particles’ spatial disposition. Physica A 2013;392:4824–36. https://doi.org/10.1016/j.physa.2013.06.054.Search in Google Scholar
9. Zrinyi, M, Barsi, L, Buki, A. Deformation of ferrogels induced by nonuniform magnetic fields. J Chem Phys 1996;104:8750–6. https://doi.org/10.1063/1.471564.Search in Google Scholar
10. Collin, D, Auernhammer, GK, Gavat, O, Martinoty, P, Brand, HR. Frozen-in magnetic order in uniaxial magnetic gels: preparation and physical properties. Macromol Rapid Commun 2003;24:737–41. https://doi.org/10.1002/marc.200350016.Search in Google Scholar
11. Raikher, YL, Rusakov, VV, Coffey, WT, Kalmykov, YP. Dynamic susceptibilities of an assembly of dipolar particles in an elastic environment. Phys Rev E 2001;63:031402. https://doi.org/10.1103/physreve.63.031402.Search in Google Scholar
12. Monz, S, Tschöpe, A, Birringer, R. Magnetic properties of isotropic and anisotropic CoFe2O4-based ferrogels and their application as torsional and rotational actuators. Phys Rev E 2008;78:021404. https://doi.org/10.1103/physreve.78.021404.Search in Google Scholar
13. Kim, Y, Yuk, H, Zhao, R, Chester, SA, Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018;558:274–9. https://doi.org/10.1038/s41586-018-0185-0.Search in Google Scholar
14. Zhao, R, Kim, Y, Chester, SA, Sharmama, P, Zhao, X. Mechanics of hard-magnetic soft materials. J Mech Phys Solid 2019;124:244–63. https://doi.org/10.1016/j.jmps.2018.10.008.Search in Google Scholar
15. Bender, P, Günther, A, Tschöpe, A, Birringer, R. Synthesis and characterization of uniaxial ferrogels with Ni nanorods as magnetic phase. J Magn Magn Mater 2011;323:2055–63. https://doi.org/10.1016/j.jmmm.2011.03.016.Search in Google Scholar
16. Bender, P, Krämer, F, Tschöpe, A, Birringer, R. Influence of dipolar interactions on the angular-dependent coercivity of nickel nanocylinders. J Phys D Appl Phys 2015;48:145003. https://doi.org/10.1088/0022-3727/48/14/145003.Search in Google Scholar
17. Gratz, M, Tschöpe, A. Size effects in the oscillatory rotation dynamics of Ni nanorods in poly(ethylene oxide) solutions. Macromolecules 2019;52:6600–12. https://doi.org/10.1021/acs.macromol.9b00788.Search in Google Scholar
18. Masuda, H, Satoh, M. Fabrication of gold nanodot array using anodic porous alumina as an evaporation mask. Jpn J Appl Phys 1996;35:L126–9. https://doi.org/10.1143/jjap.35.l126.Search in Google Scholar
19. Li, AP, Müller, F, Birner, A, Nielsch, K, Gösele, U. Hexagonal pore arrays with a 50–420 nm interpore distance formed by self-organization in anodic alumina. J Appl Phys 1998;84:6023–6. https://doi.org/10.1063/1.368911.Search in Google Scholar
20. Nielsch, K, Müller, F, Li, A-P, Gösele, U. Uniform nickel deposition into ordered alumina pores by pulsed electrodeposition. Adv Mater 2000;12:582–6.10.1002/(SICI)1521-4095(200004)12:8<582::AID-ADMA582>3.0.CO;2-3Search in Google Scholar
21. Schopphoven, C, Birster, K, Schweitzer, R, Lux, C, Huang, S, Kästner, M, et al.. Elastic deformations in semi-dilute ni nanorod/hydrogel composites. Arch Appl Mech 2019;89:119–32. https://doi.org/10.1007/s00419-018-1461-z.Search in Google Scholar
22. Ross, CA, Hwang, M, Shima, M, Cheng, JY, Farhoud, M, Savas, TA, et al.. Micromagnetic behavior of electrodeposited cylinder arrays. Phys Rev B 2002;65:144417. https://doi.org/10.1103/physrevb.65.144417.Search in Google Scholar
23. Skomski, R, Coey, JMD. Permanent magnetism. Bristol, UK; Philadelphia, PA: Institute of Physics Publishing; 1999.Search in Google Scholar
24. Stoner, EC, Wohlfarth, EP. A mechanism of magnetic hysteresis in heterogeneous alloys. IEEE Trans Magn 1991;27:3475. https://doi.org/10.1109/tmag.1991.1183750.Search in Google Scholar
25. Osborn, JA. Demagnetizing factors of the general ellipsoid. Phys Rev 1945;67:351–7. https://doi.org/10.1103/physrev.67.351.Search in Google Scholar
26. Klein, T, Laptev, A, Günther, A, Bender, P, Tschöpe, A, Birringer, R. Magnetic-field-dependent optical transmission of nickel nanorod colloidal dispersions. J Appl Phys 2009;106:114301. https://doi.org/10.1063/1.3259365.Search in Google Scholar
27. Schopphoven, C, Tschöpe, A. Magnetic anisotropy of nickel nanorods and the mechanical torque in an elastic environment. J Phys D Appl Phys 2018;51:115005. https://doi.org/10.1088/1361-6463/aaad9a.Search in Google Scholar
28. Ivanov, YP, Vázquez, M, Chubykalo-Fesenko, O. Magnetic reversal modes in cylindrical nanowires. J Phys D Appl Phys 2013;46:485001. https://doi.org/10.1088/0022-3727/46/48/485001.Search in Google Scholar
29. Bender, P, Tschöpe, A, Birringer, R. Determination of the shear modulus of gelatine hydrogels by magnetization measurements using dispersed nickel nanorods as mechanical probes. J Magn Magn Mater 2013;346:152–60. https://doi.org/10.1016/j.jmmm.2013.07.010.Search in Google Scholar
30. Stepanov, GV, Borin, DY, Storozhenko, PA. Rotation of magnetic particles inside the polymer matrix of magnetoactive elastomers with a hard magnetic filler. J Magn Magn Mater 2017;431:138–40. https://doi.org/10.1016/j.jmmm.2016.07.051.Search in Google Scholar
31. Günther, A, Bender, P, Tschöpe, A, Birringer, R. Rotational diffusion of magnetic nickel nanorods in colloidal dispersions. J Phys Condens Matter 2011;23:325103. https://doi.org/10.1088/0953-8984/23/32/325103.Search in Google Scholar PubMed
32. Krämer, F, Gratz, M, Tschöpe, A. Analysis of the static magnetic field-dependent optical transmission of Ni nanorod colloidal suspensions. J Appl Phys 2016;120:044301. https://doi.org/10.1063/1.4962944.Search in Google Scholar
33. Tschöpe, A, Krämer, F, Birster, K, Gratz, M, Birringer, R. Quantification of magneto-optically active nanorods and inactive aggregates in nickel nanorod colloids. Colloids Interface Sci Commun 2016;10–11:11–4. https://doi.org/10.1016/j.colcom.2016.03.001.Search in Google Scholar
34. Tschöpe, A, Birster, K, Trapp, B, Bender, P, Birringer, R. Nanoscale rheometry of viscoelastic soft matter by oscillating field magneto-optical transmission using ferromagnetic nanorod colloidal probes. J Appl Phys 2014;116:184305. https://doi.org/10.1063/1.4901575.Search in Google Scholar
35. Schrittwieser, S, Ludwig, F, Dieckhoff, J, Tschöpe, A, Günther, A, Richter, M, et al.. Direct protein detection in the sample solution by monitoring rotational dynamics of nickel nanorods. Small 2014;10:407–11. https://doi.org/10.1002/smll.201300023.Search in Google Scholar PubMed
36. Gratz, M, Tschöpe, A. Optical transmission versus ac magnetization measurements for monitoring colloidal Ni nanorod rotational dynamics. J Phys D Appl Phys 2017;50:015001. https://doi.org/10.1088/1361-6463/50/1/015001.Search in Google Scholar
37. Schulz, L, Schirmacher, W, Omran, A, Shah, VR, Böni, P, Petry, W, et al.. Elastic torsion effects in magnetic nanoparticle diblock-copolymer structures. J Condes Matter Phys 2010;22:346008. https://doi.org/10.1088/0953-8984/22/34/346008.Search in Google Scholar PubMed
38. Bender, P, Tschöpe, A, Birringer, R. Magnetization measurements reveal the local shear stiffness of hydrogels probed by ferromagnetic nanorods. J Magn Magn Mater 2014;372:187–94. https://doi.org/10.1016/j.jmmm.2014.07.067.Search in Google Scholar
39. Rubinstein, M, Colby, R. Polymer physics, 1st ed. Oxford: Oxford University Press; 2003.10.1093/oso/9780198520597.003.0001Search in Google Scholar
40. Hess, M, Gratz, M, Remmer, H, Webers, S, Landers, J, Borin, D, et al.. Scale-dependent particle diffusivity and apparent viscosity in polymer solutions as probed by dynamic magnetic nanorheology. Soft Matter 2020;16:7562–75. https://doi.org/10.1039/c9sm00747d.Search in Google Scholar PubMed
41. Yoshida, T, Enpuku, K. Simulation and quantitative clarification of ac susceptibility of magnetic fluid in nonlinear brownian relaxation region. Jpn J Appl Phys 2009;48:127002. https://doi.org/10.1143/jjap.48.127002.Search in Google Scholar
42. Remmer, H, Gratz, M, Tschöpe, A, Ludwig, F. Magnetic field dependence of Ni nanorod Brownian relaxation. IEEE Trans Magn 2017;53:1–4. https://doi.org/10.1109/tmag.2017.2701145.Search in Google Scholar
43. Raikher, Y, Rusakov, V. Magnetic rotary microrheology in a Maxwell fluid. J Magn Magn Mater 2006;300:e229–33. https://doi.org/10.1016/j.jmmm.2005.10.086.Search in Google Scholar
44. Raikher, YL, Rusakov, VV. Theory of Brownian motion in a Jeffreys fluid. J Exp Theor Phys 2010;111:883–9. https://doi.org/10.1134/s1063776110110191.Search in Google Scholar
45. Rusakov, VV, Raikher, YL. Magnetic response of a viscoelastic ferrodispersion: from a nearly Newtonian ferrofluid to a Jeffreys ferrogel. J Chem Phys 2017;147:124903. https://doi.org/10.1063/1.4989752.Search in Google Scholar PubMed
46. Remmer, H, Dieckhoff, J, Tschöpe, A, Roeben, E, Schmidt, AM, Ludwig, F. Dynamics of CoFe2O4 single-core nanoparticles in viscoelastic media. Phys Procedia 2015;75:1150–7. https://doi.org/10.1016/j.phpro.2015.12.186.Search in Google Scholar
47. Remmer, H, Roeben, E, Schmidt, AM, Schilling, M, Ludwig, F. Dynamics of magnetic nanoparticles in viscoelastic media. J Magn Magn Mater 2017;427(Suppl C):331–5. https://doi.org/10.1016/j.jmmm.2016.10.075.Search in Google Scholar
48. Roeben, E, Roeder, L, Teusch, S, Effertz, M, Ulrich, KD, Schmidt, AM. Magnetic particle nanorheology. Colloid Polym Sci 2014;292:2013–23. https://doi.org/10.1007/s00396-014-3289-6.Search in Google Scholar
49. Wilhelm, C, Browaeys, J, Ponton, A, Bacri, J-C. Rotational magnetic particles microrheology: the maxwellian case. Phys Rev E 2003;67:011504. https://doi.org/10.1103/physreve.67.011504.Search in Google Scholar PubMed
50. Stolbov, OV, Raikher, YL, Balasoiu, M. Modelling of magnetodipolar striction in soft magnetic elastomers. Soft Matter 2011;7:8484–7. https://doi.org/10.1039/c1sm05714f.Search in Google Scholar
51. Ivaneyko, D, Toshchevikov, V, Saphiannikova, M, Heinrich, G. Mechanical properties of magneto-sensitive elastomers: unification of the continuum-mechanics and microscopic theoretical approaches. Soft Matter 2014;10:2213–25. https://doi.org/10.1039/c3sm52440j.Search in Google Scholar PubMed
52. Metsch, P, Kalina, KA, Spieler, C, Kästner, M. A numerical study on magnetostrictive phenomena in magnetorheological elastomers. Comput Mater Sci 2016;124:364–74. https://doi.org/10.1016/j.commatsci.2016.08.012.Search in Google Scholar
53. Stolbov, OV, Raikher, YL. Magnetostriction effect in soft magnetic elastomers. Arch Appl Mech 2019;89:63–76. https://doi.org/10.1007/s00419-018-1452-0.Search in Google Scholar
54. Schümann, M, Gundermann, T, Odenbach, S. Microscopic investigation of the reasons for field-dependent changes in the properties of magnetic hybrid materials using x-ray microtomography. Arch Appl Mech 2019;89:77–89. https://doi.org/10.1007/s00419-018-1453-z.Search in Google Scholar
55. Biller, AM, Stolbov, OV, Raikher, YL. Modeling of particle interactions in magnetorheological elastomers. J Appl Phys 2014;116:114904. https://doi.org/10.1063/1.4895980.Search in Google Scholar
56. Biller, AM, Stolbov, OV, Raikher, YL. Mesoscopic magnetomechanical hysteresis in a magnetorheological elastomer. Phys Rev E 2015;92:023202. https://doi.org/10.1103/physreve.92.023202.Search in Google Scholar
57. Puljiz, M, Huang, S, Kalina, KA, Nowak, J, Odenbach, S, Kästner, M, et al.. Reversible magnetomechanical collapse: virtual touching and detachment of rigid inclusions in a soft elastic matrix. Soft Matter 2018;14:6809–21. https://doi.org/10.1039/c8sm01051j.Search in Google Scholar PubMed
58. Becker, TI, Böhm, V, Chavez Vega, J, Odenbach, S, Raikher, YL, Zimmermann, K. Magnetic-field-controlled mechanical behavior of magneto-sensitive elastomers in applications for actuator and sensor systems. Arch Appl Mech 2019;89:133–52. https://doi.org/10.1007/s00419-018-1477-4.Search in Google Scholar
59. Kalina, KA, Metsch, P, Kästner, M. Microscale modeling and simulation of magnetorheological elastomers at finite strains: a study on the influence of mechanical preloads. Int J Solid Struct 2016;102-103:286–96. https://doi.org/10.1016/j.ijsolstr.2016.10.019.Search in Google Scholar
60. Puljiz, M, Huang, S, Auernhammer, GK, Menzel, AM. Forces on rigid inclusions in elastic media and resulting matrix-mediated interactions. Phys Rev Lett 2016;117:238003. https://doi.org/10.1103/physrevlett.117.238003.Search in Google Scholar PubMed
61. Puljiz, M, Menzel, AM. Forces and torques on rigid inclusions in an elastic environment: resulting matrix-mediated interactions, displacements, and rotations. Phys Rev E 2017;95:053002. https://doi.org/10.1103/physreve.95.053002.Search in Google Scholar PubMed
62. Puljiz, M, Menzel, AM. Displacement field around a rigid sphere in a compressible elastic environment, corresponding higher-order Faxén relations, as well as higher-order displaceability and rotateability matrices. Phys Rev E 2019;99:053002. https://doi.org/10.1103/physreve.99.053002.Search in Google Scholar
© 2020 Kerstin Birster et al., published by De Gruyter, Berlin/Boston
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Articles in the same Issue
- Frontmatter
- Reviews
- Multiphysics modeling of porous ferrogels at finite strains
- Magneto-mechanical coupling of single domain particles in soft matter systems
- Actuators based on a controlled particle-matrix interaction in magnetic hybrid materials for applications in locomotion and manipulation systems
- Magnetic torque-driven deformation of Ni-nanorod/hydrogel nanocomposites
- Hybrid nanomaterials of biomolecule corona coated magnetic nanoparticles and their interaction with biological systems
- Structure and rheology of soft hybrid systems of magnetic nanoparticles in liquid-crystalline matrices: results from particle-resolved computer simulations
Articles in the same Issue
- Frontmatter
- Reviews
- Multiphysics modeling of porous ferrogels at finite strains
- Magneto-mechanical coupling of single domain particles in soft matter systems
- Actuators based on a controlled particle-matrix interaction in magnetic hybrid materials for applications in locomotion and manipulation systems
- Magnetic torque-driven deformation of Ni-nanorod/hydrogel nanocomposites
- Hybrid nanomaterials of biomolecule corona coated magnetic nanoparticles and their interaction with biological systems
- Structure and rheology of soft hybrid systems of magnetic nanoparticles in liquid-crystalline matrices: results from particle-resolved computer simulations