
An analysis on the stability of a state dependent delay differential equation
-
Sertaç Erman
 and
Ali Demir
and
Ali Demir

Abstract
In this paper, we present an analysis for the stability of a differential equation with state-dependent delay. We establish existence and uniqueness of solutions of differential equation with delay term
1 Introduction
Delay differential equations (DDE) have been used in many fields for a long time. However, state-dependent delay differential equations (SDDE) are used to make more realistic modelling in the systems whose delay varies according to the internal effects of the system. For example, the length of time to maturity is taken as constant delay in a simple population dynamics model, see in [1]. In [2], it was observed that the length of time to maturity of Antarctic whales and seals alter according to the state of the population and it was analyzed by using a mathematical model with SDDE in [3]. In addition, mathematical models with SDDE appear in many fields such as physics, control theory, neural network, medicine, biology etc., see Section 2 in [4] as a review.
Researchers have investigated SDDE for the last 50 years. Driver [5, 6] and Driver and Norris [7] developed a fundamental theory and proved local existence and uniqueness theorem for SDDE having Lipschitz continuous initial functions. Winston [8] showed that SDDE has a unique solution under some conditions in addition to continuos initial function. There are some of the earliest studies on SDDE in [9–11]. Moreover, many researches on stability, bifurcations and existence of solutions of SDDE have been done so far, for example, [3, 4, 12–31]. Especially, [32] can be seen as a detailed review on DDE and SDDE and related studies.
In this paper, we consider the following type of SDDE
where A0, A1 ∈ ℝ and τ(u(t)) > 0 for all t ∈ ℝ+. To analyze stability of solution of equation (1), we use the following characteristic equation
where h is an independent real valued parameter which is in the range of τ(u(t)). By this way, we analyze the stability of equation (1) by using the stability analysis of certain linear delay differential equations with constant delay which has the characteristic equation (2).
In the general case, the characteristic roots λj, j = 1, 2, ···, of equation (1) are obtained by solving the characteristic equation (2) where λj is a complex number. If the characteristic roots have negative real parts, i.e., Re(λj) < 0 for all j = 1, 2, ··· then the solution of (1) is asymptotically stable and if at least one of the characteristic roots have positive real parts, i.e., Re(λj) > 0 for some j = 1, 2, ··· then the solution of (1) is unstable.
We attempt to determine the stability and instability regions of the system in parameter space (A0, A1) by using D-partition method. The method is originated from paper [33]. It is well explained in [34–38] and analysis are conducted. Let’s consider the characteristic equation g(λ, A0, A1) in two parameters for equation (1). D-partition method is based on fact that the roots of the characteristic equation are continuos functions of the parameters A0 and A1. When varying the parameters, λj change continuously in complex plane and at the point where the stability changes, one λj crosses the imaginary axis. In this method parameter space is divided into regions with the hypersurfaces. These hypersurfaces are called the D-curves. The points of the D-curves correspond to pure imaginary roots or zero root of the characteristic equation. Moreover, in each region in the parameter space determined by the D-curves, the characteristic equation has the same number of roots with positive real part. Thus, finding the number of roots with positive real parts for specific point is enough to find the number of roots with positive real parts the region including this specific point.
In order to obtain D-curves, pure imaginary number λ = iω is substituted in characteristic equation g(λ, A0, A1). Equating to zero the real and imaginary parts, we have
Hence, by making use of (3) and (4), parametric equations can be written as
where ω is a parameter and ranges from –∞ to ∞. These curves and singular solutions of equations (3) and (4) constitute D-curves.
We use Rekasius transform
where h, T ∈ ℝ and for p ∈ ℤ in addition to D-partition method. In 1980, Rekasius [39] proposed the transformation (5) for DDEs. Later, Thowsen [40] did exact calculations by taking the square of right hand side of (5) since the transformation (5) transform a circle to a semi-circle which leads some mistakes. However, Hertz et al. [41] did exact calculations by considering two singular cases:
(i) e–iωh = –1 for T = ±∞
(ii) e–iωh = 1 for T = 0
Olgaç and Sipahi [42, 43] studied a method using Rekasius transform for DDE with constant delay.
We establish the existence and uniqueness of solutions of equation (1) with delay term
2 Existence and uniqueness of solution
In this section, we consider the following type of SDDE
where A0, A1 ∈ ℝ+, a, b, c, d ∈ ℝ such that a and c are nonzero and at least one of b or d is nonzero.
Let P(u(t)) = a + bu(i) and Q(u(t)) = c + du(t).
i) u(t) > or u(t) < μ when sign(b) sign(d) = 1 and μ < σ,
ii) u(t) > μ or u(t) < when sign(b) sign(d) = 1 and σ < μ,
iii) μ < u(t) < σ when sign(b) sign(d) = –1 and μ < σ,
iv) σ < u(t) < μ when sign(b) sign(d) = –1 and σ < μ, is satisfied then τ(u(t)) ≥ 0.
In order to guarantee the positivity of delay term τ(u(t)), we need to put some restrictions on the range of parameter values under consideration.
Let A0, A1 ∈ ℝ+and τ(u(t)) be delay function of equation(6). The delay differential equation
has a unique solution u(t) ∈ C1([0, ∞) → (L0, M0)) if Lipschitz history function u0(t): [–τ, 0] → (L0, M0) exists such that
and
Proof. For the proof, the following four cases are considered.
Case 1: Let’s prove that u(t) ∈ (L0, M0) for all t > 0 when μ < σ < 0. Suppose not, then there exists t0 > 0 such that u(t) ∈ (L0, M0) for all t < t0 but u(t0) = L0 or u(t0) = M0. First assume that u(t0) = L0 which implies u′(t0) ≤ 0. On the other hand
and
which is a contradiction. In a similar way, if u(t0) = M0, then u′(t0) ≥ 0. On the other hand
which is a contradiction.
Case 2: Let’s prove that u(t) ∈ (L0, M0) for all t > 0 when 0 < σ < μ. Suppose not, then there exists t0 > 0 such that u(t) ∈ (L0, M0) for all t < t0 but u(t0) = L0 or u(t0) = M0. First assume that u(t0) = L0 which implies u′(t0) ≤ 0. On the other hand
which is a contradiction. In a similar way, if u(t0) = M0, then u′(t0) ≥ 0. On the other hand
which is a contradiction.
Case 3: Let’s prove that u(t) ∈ (L0, M0) for all t > 0 when
and
which is a contradiction. In a similar way, if u(t0) = M0 – ɛ for ɛ > 0, then u′(t0) ≥ 0. On the other hand
which is a contradiction since u(t0) and A0ɛ tend to μ and 0 respectively when ɛ tends to 0.
Case 4: Let’s prove that u(t) ∈ (L0, M0) for all t > 0 when μ < 0 < σ,
which is a contradiction since u(t0) and A0ɛ tend to μ and 0 respectively when ɛ tends to 0. In a similar way, if u(t0) = M0, then u′(t0) ≥ 0. On the other hand
which is a contradiction. As a result, there is no such t0 ∈ ℝ+ and (8) holds.
Since
are Lipschitz with respect to each of their argument, local existence and uniqueness of the solution u(t) follows from Driver [5]. □
Let A0, A1 ∈ ℝ+such that
and
Proof. For the proof, following two cases are considered.
Case 1: Let’s prove that u(t) ∈ (L0, M0) for all t > 0 when 0 < μ ≤ σ or σ < 0 < μ,
which is a contradiction. In a similar way, if u(t0) = M0 – ɛ for ɛ > 0, then u′(t0) ≥ 0. On the other hand
which is a contradiction since u(t0) and A0ɛ tend to μ and 0 respectively when ɛ tends to 0.
Case 2: Let’s prove that u(t) ∈ (L0, M0) for all t > 0 when σ ≤ μ < 0 or μ < 0 < μ,
which is a contradiction since u(t0) and A0ɛ tend to μ and 0 respectively when ɛ tends to 0. In a similar way, if u(t0) = M0, then u′(t0) ≥ 0. On the other hand
which is a contradiction. As a result, there is no such t0 ∈ ℝ+ and (9) holds.
Since
are Lipschitz with respect to each of their argument, local existence and uniqueness of the solution u(t) follows from Driver [5]. □
If the delay functions τ(u(t)) and
Let’s be
Let’s be
Let’s be (L0, M0) = (σ, μ) for
Let’s be
In the case of d = 0 the Theorem 2.2 does not hold and the last two intervals in (8) in Theorem 2.1 do not longer exist. Moreover, if d = 0, c = 1, a > 0 and b > 0 then by Theorem 2.1, the solution exists in the interval
These results allow us to do stability analysis of solution of (1) by using the range of τ(u(t)) which is obtained by Theorems 2.1 and 2.2.
Furthermore, if the delay function τ(u(t)) has a complicated form, then [1/1] Padé approximation for τ(u(t)) can be obtained and the stability analysis can be done by using rough range of τ(u(t)) which is obtained by the range of the solution u(t) approximately by the help of Theorems 2.1 and 2.2. The same can be done, if the delay function τ(u(t)) is not known exactly but some of its suitable values are obtained by some experiments or a heuristic method.
3 Stability analysis
In this section, we firstly consider the stability of equation (1) with the delay function τ(u(t)) which has an upper bound for all t ∈ ℝ+, i.e., there exist at least one M1 ∈ ℝ such that 0 < τ(u(t)) < M1 for all t ∈ ℝ+.
In this case, the value of delay of equation (1) varies in interval (0, M1) while t is varying. The independent parameter h of the characteristic equation (2) takes values in the interval (0, M1). As a part of the D-partition method, we have
this straight line is a line forming the boundary of the D-partition and is denoted by C*. Substituting λ = iω and equating to zero the real and imaginary parts in characteristic equation (2), we find the following equations
Solving the above equations for A0 and A1, the following parametric curve equations are obtained
Since A0(ω, h/ and A1(ω, h) are even with respect to ω, it is sufficient to take ω ∈ (0, ∞). Equations (13)-(14) define a family of curves since h is not a constant. Holding h fixed, these define A0(ω, h) and A1(ω, h) as function of ω, providing a parametric representation of a curve. Different values of h give different curves in the family. Since equations (13)-(14) have singularity for ωh = kπ, we introduce intervals
C0(h) contains the limit point for ω → 0
In addition, the following limits can be obtained for k ∈ ℕ – {0}
The curves C0(h) intersect C*exactly once at
Proof. Intersection of C0(h) and C* is obvious from (15). For the second part of Lemma 3.1, suppose that if Ck(h) and C* has intersection points there exist ω ∈ Jk for equations (13)-(14) which satisfies equation (10). By using equations (13)-(14) in equation (10) we have
There is no solution ω ∈ Jk for k ∈ ℕ – {0} which is a contradiction. □
The curves Ck(h0) do not intersect each other for h0 ∈ ℝ+.
Proof. Suppose that there exist an intersection point. It means that, there exist ω1 ≠ ω2 ∈ ℝ+ such that A0(ω1, h0) = A0(ω2, h0) and A1(ω1, h0) = A1(ω2, h0). These equalities imply that
from equation (13) and (14). For n ∈ ℕ, ω1h0 ≠ ω2h0 + 2nπ is obtained from the left equality in (16) because of ω1 ≠ ω2: In addition, left and right equalities in (16) lead to cos(ω1h0) = cos(ω2h0) which is a contradiction. □
The curve Ck(h0) intersects the line A0 = 0 exactly once for h0 ∈ ℝ+. Moreover, the intersection point (0, Pk) satisfies the following inequalities
Proof. When ω ∈ Jk, the equation A0(ω, h0) = 0 implies
is obtained by substituting
The solution of equation
is asymptotically stable, i.e., all the roots of equation
have negative real parts, if and only if
(a)
(b)
Proof. When A0 > 0 and A1 = 0, the solution of equation is clearly asymptotically stable. The stability region which includes half line A0 > 0 and A1 = 0, lies above C* and below C0(h) because of Lemmaa 3.1, 3.2 and 3.3. The conditions (a)–(b) are algebraic representation of this region in parameter space (A0, A1).
To find the number of roots with positive real parts in each region in the parameter space determined by the D-curves, we use the following the ideas from [38]. Writing λ = μ + iω with μ, ω ∈ ℝ in characteristic equation g(λ, A0, A1), we find two real equations
for the real and imaginary parts of λ. Direction of movement of an element is determined by the following proposition, using Jacobian matrix J defined by
The pure imaginary roots enter the right half-plane for parameters sets in the (A0, A1) parameter region to the left of the D-curves, when we follow this curve in the direction of increasing ω, whenever det(J) < 0 and to the right when det(J) > 0 [38].
Since the determinant of Jacobian matrix of equation (18) satisfies the following inequalities
the pure imaginary roots move into the right half-plane when moving away in the parameter space to the left of C2k(h) and to the right of C2k+1(h), with "left" and "right" as determined w.r.t. a counter clock-wise tracking of C2k(h) and a clock-wise tracking of C2k+1(h) respectively.
In Fig. 1 these results are illustrated for h = 1. The curves (13) and (14) and the straight line (10) form the D-partition are shown and the number of roots in the right half plane is indicated for each region.
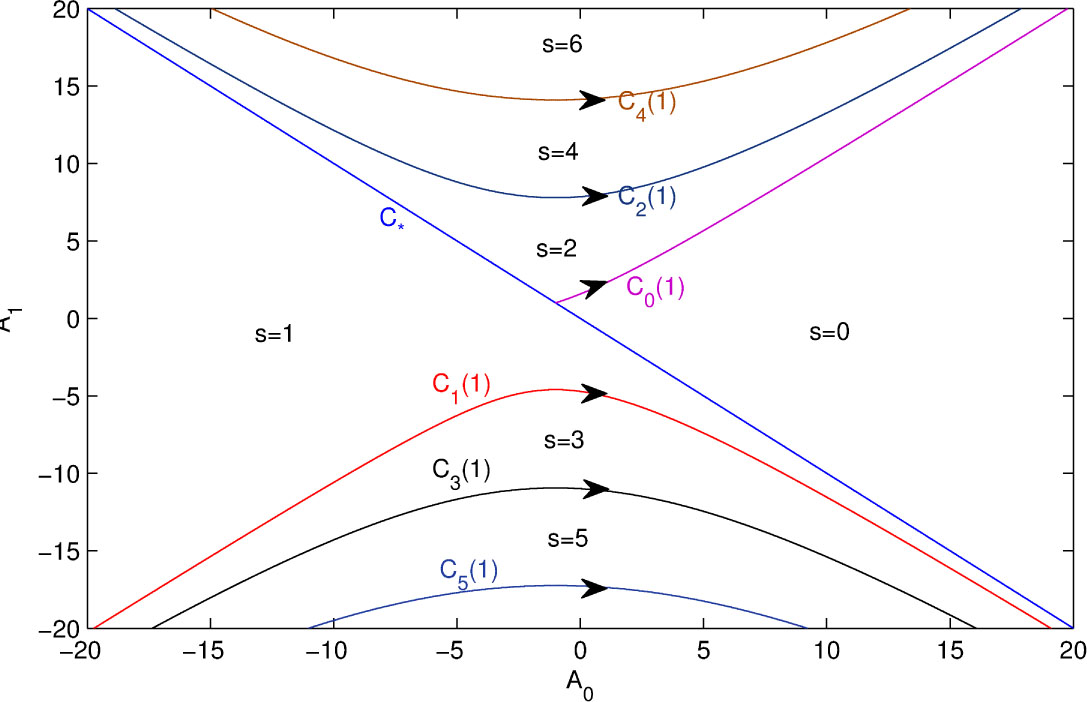
The member of the D-curves family Ck(h) in the parameter space (A0, A1) for h = 1. The arrows along the curves refer to the direction of increasing ω. The numbers s in the different regions bordered by the curves indicate the number of roots in the right half plane.
Until Theorem 3.4, parameter is taken as a real constant. Now we determine how stability region varies when h is varying.
The members of family of curves Ck(h) do not intersect each other for k ∈ ℕ. Proof. Suppose that there exists an intersection point for h1 < h2. It means that, there exist ω1h1, ω2h2 ∈ (kπ, (k + 1)π) such that
Cos(ω1h1) = cos(ω2h2) is obtained by using (21) and (22) which implies that ω1h1 = ω2h2 because of ω1h1, ω2h2 ∈ (kπ, (k + 1)π). Therefore we have ω1 ≠ ω2 from the assumption h1 < h2 which contradicts (22).
If h1 < h2, C0(h2) lies below C0(h1) in parameter space (A0, A1).
Proof. Taking the derivative of (13) and (14) with respect to h, we obtain
It implies that, A0(ω, h) is a monotone increasing function and A1(ω, h) is a monotone decreasing function for
The curves C0(h) are shown for h = 0:25; 0:75, 1, 1:3 in Fig. 2.

The members of the D-curves family C0(h) in the parameter space (A0, A1) for h = 0:25, 0:5, 0:75, 1 and 1:3
Let’s define the set Sh as follows
If h1 < h2then Sh1 ⊂ Sh2.
Proof. It is clear from Lemma 3.7
The solution of equation(1)with delay term τ(u(t)) > 0 which satisfies the condition 0 < τ(u(t)) < M1for all t ∈ ℝ+is asymptotically stable if and only if the following conditions are satisfied:
(ã)
Proof. It is obvious form Theorem 2.1 and Proposition 3.8 that if the conditions. (ã) and
A delay value of DDE is called critical delay if DDE has pure imaginary or zero eigenvalues at this delay value.
Critical delays of an equation are the values at which the qualitative behavior of the system changes. Between any two successive critical values, the behavior of the solution does not change.
Now, by using transformation (5) we rewrite the critical delay values of equation (17) in terms of parameter.
λ = iω is a root of equation(18)for some h if and only if λ = iω is also a root of
for some T ≥ 0
Proof. Let λ = iω be a root of equation (18). By using transformation (5) in equation (18), we obtain
Multiplying this equation by 1 + iωT and arranging properly, we get
which implies that λ = iω is a root of equation (23) for
As a result,
are obtained under the condition |A0| < A1. Let hn denote least hp value which is greater than 0. Therefore, the solution of equation (17) is stable for h ∈ (0, hn) when 0 < A0 < A1. Hence we can state the following result about stability of the solution for the equation (1).
The solution of the equation(1)with delay τ(u(t)) > 0 such that 0 < τ(u(t)) < M1for all t ∈ ℝ+is asymptotically stable under the conditions |A0| < A1and M1 < hn.
Now, we give a stability criterion which is independent from delay for equation (1) by using D-partition method.
If |A1| < A0, then the solution of equation (1) is asymptotically stable.
Proof. It is obvious from (11) that, |A1(ω)| ≥ |A0(ω)| for all ω ∈ Jk. Therefore, all of the D-curves is in this region, i.e., there is no D-curve in the region described by |A1| < |A0|. Moreover, the half line A0 > 0 and A1 = 0 on which the solution equation (1) is asymptotically stable, is in the region described by |A1| < A0.
4 Conclusion
In this study, we have analyzed the stability of a differential equation with state-dependent delay under some conditions which guarantee existence and uniqueness of solutions. For the positivity of delay term
We consider two cases according to the boundedness of delay term. In the first case, the delay term is supposed to be bounded and we have two theorems, namely Theorems 3.9 and 3.12, related to stability of the solution. It is shown that upper bound of the delay term affects the stability region of differential equation with state-dependent delay: smaller upper bound means greater stability region. Moreover, by using the Rekasius transform, which is an analytic transformation, we get equation (23) which is equivalent to the characteristic equation of a differential equation with state-dependent delay. In the second case, the delay term is supposed to be unbounded and we have a theorem, namely Theorem 3.13. It is shown that we can find a stability region for the solution, even though the delay term is unbounded, since there is a stability region which is independent from delay term.
In the future we would like to investigate the stability of differential equation with different state-dependent delay. This would allow for a better understanding of differential equation with state-dependent delay.
References
[1] Murray J.D., Mathematical biology I. An introduction, 3rd ed, Springer-Verlag, Berlin Heidelberg, 2002.Search in Google Scholar
[2] Gambell R., Birds and mammals-Antarctic whales in Antarctica, W. N. Bonner and D. W. H.Walton, eds., Pergamon Press, New York, 1985, 223-241.10.1016/B978-0-08-028881-9.50022-4Search in Google Scholar
[3] Aiello W.G., Freedman H.I., Wu J., Analysis of a model representing stage-structured population growth with statedependent time delay, SIAM J Appl Math, 1992, 52, 855–869.10.1137/0152048Search in Google Scholar
[4] Hartung F., Krisztin T., Walther H.O., Wu J. Functional differential equations with state-dependent delays: theory and applications, A. Canada, P. Drabek, A. Fonda, Eds., Handbook of Differential Equations: Ordinary Differential Equations, vol. III, Elsevier/North-Holland, Amsterdam, 2006, 435–545.10.1016/S1874-5725(06)80009-XSearch in Google Scholar
[5] Driver R.D., Existence theory for a delay-differential system, Contrib Differential Equations, 1963, 1, 317–336.Search in Google Scholar
[6] Driver R.D., A two-body problem of classical electrodynamics: the one-dimensional case, Ann Physics, 1963, 21, 122–142.10.1016/0003-4916(63)90227-6Search in Google Scholar
[7] Driver R.D., Norris M.J., Note on uniqueness for a one-dimensional two-body problem of classical electrodynamics, Ann Physics, 1967, 42, 347–351.10.1016/0003-4916(67)90076-0Search in Google Scholar
[8] Winston E., Uniqueness of solutions of state dependent delay differential equations, J Math Anal Appl, 1974, 47, 620–625.10.1016/0022-247X(74)90013-4Search in Google Scholar
[9] Cooke K.L., Asymptotic theory for the delay-differential equation u_(t)=-au(t -r(u(t))), J Math Anal Appl, 1967, 19, 160–173.10.1016/0022-247X(67)90029-7Search in Google Scholar
[10] Nussbaum R.D., Periodic solutions of some nonlinear autonomous functional differential equations, Ann Mat Pura Appl, 1974, 101, 263–306.10.1007/BF02417109Search in Google Scholar
[11] Alt W., Some periodicity criteria for functional differential equations, Manuscripta Math, 1978, 23, 295–318.10.1007/BF01171755Search in Google Scholar
[12] Mallet-Paret J., Nussbaum R.D., Paraskevopoulos P. Periodic solutions for functional differential equations with multiple state-dependent time lags, Topol. Methods Nonlinear Anal, 1994, 3, 101–16210.12775/TMNA.1994.006Search in Google Scholar
[13] Krisztin T., An unstable manifold near a hyperbolic equilibrium for a class of differential equations with state-dependent delay, Discrete Contin Dyn Syst, 2003, 9, 993–102810.3934/dcds.2003.9.993Search in Google Scholar
[14] Sieber J., Finding periodic orbits in state-dependent delay differential equations as roots of algebraic equations, Discrete Contin Dyn Syst Ser A, 2012, 32, 2607–265110.3934/dcds.2012.32.2607Search in Google Scholar
[15] Hu Q., Wu J., Global Hopf bifurcation for differential equations with state-dependent delay, J Differ Equ, 2010, 248, 2081–284010.1016/j.jde.2010.03.020Search in Google Scholar
[16] Hartung F., Differentiability of solutions with respect to the initial data in differential equations with state-dependent delay, J Dyn Differ Equ, 2011, 23, 843–88410.1007/s10884-011-9218-1Search in Google Scholar
[17] Arino O., Hadeler K.P., Hbid M.L. Existence of periodic solutions for delay differential equations with state-dependent delay, J Differ Equ, 1998, 144, 263–30110.1006/jdeq.1997.3378Search in Google Scholar
[18] Kuang Y., Smith H.L. Slowly oscillating periodic solutions of autonomous state-dependent delay differential equations, Nonlinear Anal Theory Methods Appl., 1992, 19, 855–87210.1016/0362-546X(92)90055-JSearch in Google Scholar
[19] Mallet-Paret J., Nussbaum R.D., Boundary layer phenomena for differential-delay equations with state-dependent time-lags: I, Arch Ration Mech Anal, 1992, 120, 99–14610.1007/BF00418497Search in Google Scholar
[20] Mallet-Paret J., Nussbaum R.D., Boundary layer phenomena for differential-delay equations with state-dependent time-lags: II, J Reine Angew Math, 1996, 477, 129–19710.1007/BF00418497Search in Google Scholar
[21] Mallet-Paret J., Nussbaum R.D., Boundary layer phenomena for differential-delay equations with state-dependent time-lags: III, J Differ Equ, 2003, 189, 640–69210.1016/S0022-0396(02)00088-8Search in Google Scholar
[22] Mallet-Paret J., Nussbaum R.D. Superstability and rigorous asymptotics in singularly perturbed state-dependent delay-differential equations, J Differ Equ, 2011, 250, 4037–4084.10.1016/j.jde.2010.10.024Search in Google Scholar
[23] Magal P., Arino O. Existence of periodic solutions for a state-dependent delay differential equation, J Differ Equ, 2000, 165, 61–95.10.1006/jdeq.1999.3759Search in Google Scholar
[24] Krisztin T., Arino O., The 2-dimensional attractor of a differential equation with state-dependent delay, J Dyn Differ Equ, 2001, 13, 453–522.10.1023/A:1016635223074Search in Google Scholar
[25] Kennedy B., Multiple periodic solutions of an equation with state-dependent delay, J Dyn Differ Equ, 2011, 26, 1–31.10.1007/s10884-011-9205-6Search in Google Scholar
[26] Stumpf E., On a differential equation with state-dependent delay: a global center-unstable manifold connecting an equilibrium and a periodic orbit, J Dyn Differ Equ, 2012, 24, 197–24810.1007/s10884-012-9245-6Search in Google Scholar
[27] Walther H.-O., A periodic solution of a differential equation with state-dependent delay, J Differ Equ, 2008, 244, 1910–1945.10.1016/j.jde.2008.02.001Search in Google Scholar
[28] Cooke K., Huang W., On the problem of linearization for state-dependent delay differential equations, Proc Am Math Soc, 1996, 124, 1417–1426.10.1090/S0002-9939-96-03437-5Search in Google Scholar
[29] Chueshov I., Rezounenko A., Dynamics of second order in time evolution equations with state-dependent delay, Nonlinear Analysis, 2015, 126–149.10.1016/j.na.2015.04.013Search in Google Scholar
[30] Rezounenko A., On time transformations for differential equations with state-dependent delay, Cent. Eur. J. Math., 2014, 12(2), 298-307.10.2478/s11533-013-0341-6Search in Google Scholar
[31] Otrocol D., Ilea V., Ulam stability for a delay differential equation, Cent. Eur. J. Math., 2013, 11(7), 1296-1303.10.2478/s11533-013-0233-9Search in Google Scholar
[32] Walther H.-O., Topics in Delay Differential Equation, Jahresber Dtsch Math-Ver, 2014, 116, 87–114.10.1365/s13291-014-0086-6Search in Google Scholar
[33] Neimark J.I., D-subdivision and spaces of quasi-polynomials (in Russian), Prikl Mat Mekh, 1949, 13, 349–380.Search in Google Scholar
[34] Elsgolts L.E., Norkin S.B. Introduction to the Theory and Application of Differential Equations with Deviating Arguments, Academic Press, London, 1973.Search in Google Scholar
[35] Insperger T., Stépán G., Semi-Discretization Stability and Engineering Applications for Time-Delay Systems, Springer, Newyork, 2011.10.1007/978-1-4614-0335-7Search in Google Scholar
[36] Kolmanovskii V.B., Nosov V.R., Stability of Functional Differential Equations, Academic Press, London, 1986.Search in Google Scholar
[37] Krall A.M. Stability Techniques for Continuous Linear Systems, Gordon and Breach, Newyork, 1967.Search in Google Scholar
[38] Diekmann O., Gils S.A. van, Lunel S.M.V., Walther H.-O. Delay Equations, Functional, Complex and Nonlinear Analysis, Springer, New York, 1995.10.1007/978-1-4612-4206-2Search in Google Scholar
[39] Rekasius Z., A stability test for systems with delays, Proc of joint Autom Contr Conf San Francisco, 1980.Search in Google Scholar
[40] Thowsen A., An analytic stability test for class of time-delay system, IEEE Trans. Autom. Control, 1981, 26(3), 735–736.10.1109/TAC.1981.1102694Search in Google Scholar
[41] Hertz J.D., Jury E., Zeheb E., Simplified analytic stability test for systems with commensurate time delays, IEE Proc Part D, 1984, 131, 52–56.10.1049/ip-d.1984.0008Search in Google Scholar
[42] Olgaç N., Sipahi R., An exact method for the stability analysis of time-delayed linear time-invariant (LTI) systems, IEEE Trans. Autom. Control, (2002), 47(5), 793–797.10.1109/TAC.2002.1000275Search in Google Scholar
[43] Sipahi R., Olgaç N., A unique methodology for the stability robustness of multiple time delay systems, Syst Control Lett, 2006, 55(10), 819–825.10.1016/j.sysconle.2006.03.010Search in Google Scholar
© 2016 Erman and Demir, published by De Gruyter Open
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 3.0 License.
Articles in the same Issue
- Regular Article
-
A metric graph satisfying
- Regular Article
- On the Riemann-Hilbert problem in multiply connected domains
- Regular Article
- Hamilton cycles in almost distance-hereditary graphs
- Regular Article
- Locally adequate semigroup algebras
- Regular Article
- Parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Corrigendum
- Corrigendum to: parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Regular Article
- Some new bounds of the minimum eigenvalue for the Hadamard product of an M-matrix and an inverse M-matrix
- Regular Article
- Integral inequalities involving generalized Erdélyi-Kober fractional integral operators
- Regular Article
- Results on the deficiencies of some differential-difference polynomials of meromorphic functions
- Regular Article
- General numerical radius inequalities for matrices of operators
- Regular Article
- The best uniform quadratic approximation of circular arcs with high accuracy
- Regular Article
- Multiple gcd-closed sets and determinants of matrices associated with arithmetic functions
- Regular Article
- A note on the rate of convergence for Chebyshev-Lobatto and Radau systems
- Regular Article
- On the weakly(α, ψ, ξ)-contractive condition for multi-valued operators in metric spaces and related fixed point results
- Regular Article
- Existence of a common solution for a system of nonlinear integral equations via fixed point methods in b-metric spaces
- Regular Article
- Bounds for the Z-eigenpair of general nonnegative tensors
- Regular Article
- Subsymmetry and asymmetry models for multiway square contingency tables with ordered categories
- Regular Article
- End-regular and End-orthodox generalized lexicographic products of bipartite graphs
- Regular Article
- Refinement of the Jensen integral inequality
- Regular Article
- New iterative codes for 𝓗-tensors and an application
- Regular Article
- A result for O2-convergence to be topological in posets
- Regular Article
- A fixed point approach to the Mittag-Leffler-Hyers-Ulam stability of a fractional integral equation
- Regular Article
- Uncertainty orders on the sublinear expectation space
- Regular Article
- Generalized derivations of Lie triple systems
- Regular Article
- The BV solution of the parabolic equation with degeneracy on the boundary
- Regular Article
- Malliavin method for optimal investment in financial markets with memory
- Regular Article
- Parabolic sublinear operators with rough kernel generated by parabolic calderön-zygmund operators and parabolic local campanato space estimates for their commutators on the parabolic generalized local morrey spaces
- Regular Article
- On annihilators in BL-algebras
- Regular Article
- On derivations of quantales
- Regular Article
-
On the closed subfields of
- Regular Article
- A class of tridiagonal operators associated to some subshifts
- Regular Article
- Some notes to existence and stability of the positive periodic solutions for a delayed nonlinear differential equations
- Regular Article
- Weighted fractional differential equations with infinite delay in Banach spaces
- Regular Article
- Laplace-Stieltjes transform of the system mean lifetime via geometric process model
- Regular Article
- Various limit theorems for ratios from the uniform distribution
- Regular Article
- On α-almost Artinian modules
- Regular Article
- Limit theorems for the weights and the degrees in anN-interactions random graph model
- Regular Article
- An analysis on the stability of a state dependent delay differential equation
- Regular Article
- The hybrid mean value of Dedekind sums and two-term exponential sums
- Regular Article
- New modification of Maheshwari’s method with optimal eighth order convergence for solving nonlinear equations
- Regular Article
- On the concept of general solution for impulsive differential equations of fractional-order q ∈ (2,3)
- Regular Article
- A Riesz representation theory for completely regular Hausdorff spaces and its applications
- Regular Article
- Oscillation of impulsive conformable fractional differential equations
- Regular Article
- Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex
- Regular Article
- Homoclinic solutions of 2nth-order difference equations containing both advance and retardation
- Regular Article
- When do L-fuzzy ideals of a ring generate a distributive lattice?
- Regular Article
- Fully degenerate poly-Bernoulli numbers and polynomials
- Commentary
- Commentary to: Generalized derivations of Lie triple systems
- Regular Article
- Simple sufficient conditions for starlikeness and convexity for meromorphic functions
- Regular Article
- Global stability analysis and control of leptospirosis
- Regular Article
- Random attractors for stochastic two-compartment Gray-Scott equations with a multiplicative noise
- Regular Article
- The fuzzy metric space based on fuzzy measure
- Regular Article
- A classification of low dimensional multiplicative Hom-Lie superalgebras
- Regular Article
- Structures of W(2.2) Lie conformal algebra
- Regular Article
- On the number of spanning trees, the Laplacian eigenvalues, and the Laplacian Estrada index of subdivided-line graphs
- Regular Article
- Parabolic Marcinkiewicz integrals on product spaces and extrapolation
- Regular Article
- Prime, weakly prime and almost prime elements in multiplication lattice modules
- Regular Article
- Pochhammer symbol with negative indices. A new rule for the method of brackets
- Regular Article
- Outcome space range reduction method for global optimization of sum of affine ratios problem
- Regular Article
- Factorization theorems for strong maps between matroids of arbitrary cardinality
- Regular Article
- A convergence analysis of SOR iterative methods for linear systems with weak H-matrices
- Regular Article
- Existence theory for sequential fractional differential equations with anti-periodic type boundary conditions
- Regular Article
- Some congruences for 3-component multipartitions
- Regular Article
- Bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Convolutions of harmonic right half-plane mappings
- Regular Article
- On homological classification of pomonoids by GP-po-flatness of S-posets
- Regular Article
- On CSQ-normal subgroups of finite groups
- Regular Article
- The homogeneous balance of undetermined coefficients method and its application
- Regular Article
- On the saturated numerical semigroups
- Regular Article
- The Bruhat rank of a binary symmetric staircase pattern
- Regular Article
- Fixed point theorems for cyclic contractive mappings via altering distance functions in metric-like spaces
- Regular Article
- Singularities of lightcone pedals of spacelike curves in Lorentz-Minkowski 3-space
- Regular Article
- An S-type upper bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Fuzzy ideals of ordered semigroups with fuzzy orderings
- Regular Article
- On meromorphic functions for sharing two sets and three sets in m-punctured complex plane
- Regular Article
- An incremental approach to obtaining attribute reduction for dynamic decision systems
- Regular Article
- Very true operators on MTL-algebras
- Regular Article
- Value distribution of meromorphic solutions of homogeneous and non-homogeneous complex linear differential-difference equations
- Regular Article
- A class of 3-dimensional almost Kenmotsu manifolds with harmonic curvature tensors
- Regular Article
- Robust dynamic output feedback fault-tolerant control for Takagi-Sugeno fuzzy systems with interval time-varying delay via improved delay partitioning approach
- Regular Article
- New bounds for the minimum eigenvalue of M-matrices
- Regular Article
- Semi-quotient mappings and spaces
- Regular Article
- Fractional multilinear integrals with rough kernels on generalized weighted Morrey spaces
- Regular Article
- A family of singular functions and its relation to harmonic fractal analysis and fuzzy logic
- Regular Article
- Solution to Fredholm integral inclusions via (F, δb)-contractions
- Regular Article
- An Ulam stability result on quasi-b-metric-like spaces
- Regular Article
- On the arrowhead-Fibonacci numbers
- Regular Article
- Rough semigroups and rough fuzzy semigroups based on fuzzy ideals
- Regular Article
- The general solution of impulsive systems with Riemann-Liouville fractional derivatives
- Regular Article
- A remark on local fractional calculus and ordinary derivatives
- Regular Article
- Elastic Sturmian spirals in the Lorentz-Minkowski plane
- Topical Issue: Metaheuristics: Methods and Applications
- Bias-variance decomposition in Genetic Programming
- Topical Issue: Metaheuristics: Methods and Applications
- A novel generalized oppositional biogeography-based optimization algorithm: application to peak to average power ratio reduction in OFDM systems
- Special Issue on Recent Developments in Differential Equations
- Modeling of vibration for functionally graded beams
- Special Issue on Recent Developments in Differential Equations
- Decomposition of a second-order linear time-varying differential system as the series connection of two first order commutative pairs
- Special Issue on Recent Developments in Differential Equations
- Differential equations associated with generalized Bell polynomials and their zeros
- Special Issue on Recent Developments in Differential Equations
- Differential equations for p, q-Touchard polynomials
- Special Issue on Recent Developments in Differential Equations
- A new approach to nonlinear singular integral operators depending on three parameters
- Special Issue on Recent Developments in Differential Equations
- Performance and stochastic stability of the adaptive fading extended Kalman filter with the matrix forgetting factor
- Special Issue on Recent Developments in Differential Equations
- On new characterization of inextensible flows of space-like curves in de Sitter space
- Special Issue on Recent Developments in Differential Equations
- Convergence theorems for a family of multivalued nonexpansive mappings in hyperbolic spaces
- Special Issue on Recent Developments in Differential Equations
- Fractional virus epidemic model on financial networks
- Special Issue on Recent Developments in Differential Equations
- Reductions and conservation laws for BBM and modified BBM equations
- Special Issue on Recent Developments in Differential Equations
- Extinction of a two species non-autonomous competitive system with Beddington-DeAngelis functional response and the effect of toxic substances
Articles in the same Issue
- Regular Article
-
A metric graph satisfying
- Regular Article
- On the Riemann-Hilbert problem in multiply connected domains
- Regular Article
- Hamilton cycles in almost distance-hereditary graphs
- Regular Article
- Locally adequate semigroup algebras
- Regular Article
- Parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Corrigendum
- Corrigendum to: parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Regular Article
- Some new bounds of the minimum eigenvalue for the Hadamard product of an M-matrix and an inverse M-matrix
- Regular Article
- Integral inequalities involving generalized Erdélyi-Kober fractional integral operators
- Regular Article
- Results on the deficiencies of some differential-difference polynomials of meromorphic functions
- Regular Article
- General numerical radius inequalities for matrices of operators
- Regular Article
- The best uniform quadratic approximation of circular arcs with high accuracy
- Regular Article
- Multiple gcd-closed sets and determinants of matrices associated with arithmetic functions
- Regular Article
- A note on the rate of convergence for Chebyshev-Lobatto and Radau systems
- Regular Article
- On the weakly(α, ψ, ξ)-contractive condition for multi-valued operators in metric spaces and related fixed point results
- Regular Article
- Existence of a common solution for a system of nonlinear integral equations via fixed point methods in b-metric spaces
- Regular Article
- Bounds for the Z-eigenpair of general nonnegative tensors
- Regular Article
- Subsymmetry and asymmetry models for multiway square contingency tables with ordered categories
- Regular Article
- End-regular and End-orthodox generalized lexicographic products of bipartite graphs
- Regular Article
- Refinement of the Jensen integral inequality
- Regular Article
- New iterative codes for 𝓗-tensors and an application
- Regular Article
- A result for O2-convergence to be topological in posets
- Regular Article
- A fixed point approach to the Mittag-Leffler-Hyers-Ulam stability of a fractional integral equation
- Regular Article
- Uncertainty orders on the sublinear expectation space
- Regular Article
- Generalized derivations of Lie triple systems
- Regular Article
- The BV solution of the parabolic equation with degeneracy on the boundary
- Regular Article
- Malliavin method for optimal investment in financial markets with memory
- Regular Article
- Parabolic sublinear operators with rough kernel generated by parabolic calderön-zygmund operators and parabolic local campanato space estimates for their commutators on the parabolic generalized local morrey spaces
- Regular Article
- On annihilators in BL-algebras
- Regular Article
- On derivations of quantales
- Regular Article
-
On the closed subfields of
- Regular Article
- A class of tridiagonal operators associated to some subshifts
- Regular Article
- Some notes to existence and stability of the positive periodic solutions for a delayed nonlinear differential equations
- Regular Article
- Weighted fractional differential equations with infinite delay in Banach spaces
- Regular Article
- Laplace-Stieltjes transform of the system mean lifetime via geometric process model
- Regular Article
- Various limit theorems for ratios from the uniform distribution
- Regular Article
- On α-almost Artinian modules
- Regular Article
- Limit theorems for the weights and the degrees in anN-interactions random graph model
- Regular Article
- An analysis on the stability of a state dependent delay differential equation
- Regular Article
- The hybrid mean value of Dedekind sums and two-term exponential sums
- Regular Article
- New modification of Maheshwari’s method with optimal eighth order convergence for solving nonlinear equations
- Regular Article
- On the concept of general solution for impulsive differential equations of fractional-order q ∈ (2,3)
- Regular Article
- A Riesz representation theory for completely regular Hausdorff spaces and its applications
- Regular Article
- Oscillation of impulsive conformable fractional differential equations
- Regular Article
- Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex
- Regular Article
- Homoclinic solutions of 2nth-order difference equations containing both advance and retardation
- Regular Article
- When do L-fuzzy ideals of a ring generate a distributive lattice?
- Regular Article
- Fully degenerate poly-Bernoulli numbers and polynomials
- Commentary
- Commentary to: Generalized derivations of Lie triple systems
- Regular Article
- Simple sufficient conditions for starlikeness and convexity for meromorphic functions
- Regular Article
- Global stability analysis and control of leptospirosis
- Regular Article
- Random attractors for stochastic two-compartment Gray-Scott equations with a multiplicative noise
- Regular Article
- The fuzzy metric space based on fuzzy measure
- Regular Article
- A classification of low dimensional multiplicative Hom-Lie superalgebras
- Regular Article
- Structures of W(2.2) Lie conformal algebra
- Regular Article
- On the number of spanning trees, the Laplacian eigenvalues, and the Laplacian Estrada index of subdivided-line graphs
- Regular Article
- Parabolic Marcinkiewicz integrals on product spaces and extrapolation
- Regular Article
- Prime, weakly prime and almost prime elements in multiplication lattice modules
- Regular Article
- Pochhammer symbol with negative indices. A new rule for the method of brackets
- Regular Article
- Outcome space range reduction method for global optimization of sum of affine ratios problem
- Regular Article
- Factorization theorems for strong maps between matroids of arbitrary cardinality
- Regular Article
- A convergence analysis of SOR iterative methods for linear systems with weak H-matrices
- Regular Article
- Existence theory for sequential fractional differential equations with anti-periodic type boundary conditions
- Regular Article
- Some congruences for 3-component multipartitions
- Regular Article
- Bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Convolutions of harmonic right half-plane mappings
- Regular Article
- On homological classification of pomonoids by GP-po-flatness of S-posets
- Regular Article
- On CSQ-normal subgroups of finite groups
- Regular Article
- The homogeneous balance of undetermined coefficients method and its application
- Regular Article
- On the saturated numerical semigroups
- Regular Article
- The Bruhat rank of a binary symmetric staircase pattern
- Regular Article
- Fixed point theorems for cyclic contractive mappings via altering distance functions in metric-like spaces
- Regular Article
- Singularities of lightcone pedals of spacelike curves in Lorentz-Minkowski 3-space
- Regular Article
- An S-type upper bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Fuzzy ideals of ordered semigroups with fuzzy orderings
- Regular Article
- On meromorphic functions for sharing two sets and three sets in m-punctured complex plane
- Regular Article
- An incremental approach to obtaining attribute reduction for dynamic decision systems
- Regular Article
- Very true operators on MTL-algebras
- Regular Article
- Value distribution of meromorphic solutions of homogeneous and non-homogeneous complex linear differential-difference equations
- Regular Article
- A class of 3-dimensional almost Kenmotsu manifolds with harmonic curvature tensors
- Regular Article
- Robust dynamic output feedback fault-tolerant control for Takagi-Sugeno fuzzy systems with interval time-varying delay via improved delay partitioning approach
- Regular Article
- New bounds for the minimum eigenvalue of M-matrices
- Regular Article
- Semi-quotient mappings and spaces
- Regular Article
- Fractional multilinear integrals with rough kernels on generalized weighted Morrey spaces
- Regular Article
- A family of singular functions and its relation to harmonic fractal analysis and fuzzy logic
- Regular Article
- Solution to Fredholm integral inclusions via (F, δb)-contractions
- Regular Article
- An Ulam stability result on quasi-b-metric-like spaces
- Regular Article
- On the arrowhead-Fibonacci numbers
- Regular Article
- Rough semigroups and rough fuzzy semigroups based on fuzzy ideals
- Regular Article
- The general solution of impulsive systems with Riemann-Liouville fractional derivatives
- Regular Article
- A remark on local fractional calculus and ordinary derivatives
- Regular Article
- Elastic Sturmian spirals in the Lorentz-Minkowski plane
- Topical Issue: Metaheuristics: Methods and Applications
- Bias-variance decomposition in Genetic Programming
- Topical Issue: Metaheuristics: Methods and Applications
- A novel generalized oppositional biogeography-based optimization algorithm: application to peak to average power ratio reduction in OFDM systems
- Special Issue on Recent Developments in Differential Equations
- Modeling of vibration for functionally graded beams
- Special Issue on Recent Developments in Differential Equations
- Decomposition of a second-order linear time-varying differential system as the series connection of two first order commutative pairs
- Special Issue on Recent Developments in Differential Equations
- Differential equations associated with generalized Bell polynomials and their zeros
- Special Issue on Recent Developments in Differential Equations
- Differential equations for p, q-Touchard polynomials
- Special Issue on Recent Developments in Differential Equations
- A new approach to nonlinear singular integral operators depending on three parameters
- Special Issue on Recent Developments in Differential Equations
- Performance and stochastic stability of the adaptive fading extended Kalman filter with the matrix forgetting factor
- Special Issue on Recent Developments in Differential Equations
- On new characterization of inextensible flows of space-like curves in de Sitter space
- Special Issue on Recent Developments in Differential Equations
- Convergence theorems for a family of multivalued nonexpansive mappings in hyperbolic spaces
- Special Issue on Recent Developments in Differential Equations
- Fractional virus epidemic model on financial networks
- Special Issue on Recent Developments in Differential Equations
- Reductions and conservation laws for BBM and modified BBM equations
- Special Issue on Recent Developments in Differential Equations
- Extinction of a two species non-autonomous competitive system with Beddington-DeAngelis functional response and the effect of toxic substances