Towards the cosymplectic topology
-
Stéphane Tchuiaga


Abstract
In this article, the cosymplectic analogue of the symplectic flux homomorphism of a compact connected cosymplectic manifold
1 Introduction
Based on the work of Lichnerowicz [12] and the thesis of Gallissot [6] on exterior forms in mechanics, Libermann [11] gives for the first time a classification of differentiable varieties in odd dimension
The goal of this article is to continue the study of the identity component in the group of all cosymplectic diffeomorphisms of a closed cosymplectic manifold
In the context of symplectic geometry, the corresponding isomorphism between vector fields and 1-forms induced by the symplectic structure is used to construct a surjective homomorphism called the flux homomorphism, which is deeply rooted in the description of some structures of the group of Hamiltonian diffeomorphisms of a closed symplectic manifold [1].
Yet, to the best of author’s knowledge, there is no well-known definition of the cosymplectic analogue of the symplectic flux homomorphism (e.g. we don’t know the cosymplectic analogue of the flux group).
In this article, we will attempt to define the concept of flux geometry on a closed cosymplectic manifold with the aid of symplectic topology.
The existence of such a homomorphism can be motivated as follows: From [17], it follows that the identity component (with respect to the compact-open topology [8]) in the group of all cosymplectic diffeomorphisms of a closed cosymplectic manifold
In Section 2, we recall the definitions of cosymplectic manifolds, cosymplectic vector spaces, and some comparison results are stated: Proposition 2.10, Lemma 2.11, and Lemma 2.13.
Section 3 deals with the construction and the study of the cosymplectic flux homomorphism. This section starts with the study of the cosymplectic analogue of the Weinstein chart: Lemma 3.2 constructs a surjective map from the first fundamental group
Section 4 deals with the study of a surjective group homomorphism
In Section 5, we show that any co-Hamiltonian isotopy
2 Preliminaries
2.1 Cosymplectic vector spaces
Let
so that
Definition 2.1
[17]
A pair
A cosymplectic vector space is a triple
2.2 Cosymplectic manifolds
Let
2.3 Vector fields and cosymplectic structure [17]
Definition 2.2
Let
We shall denote by
Definition 2.3
Let
We shall denote by
Definition 2.4
Let
We shall denote by
Definition 2.5
Let
We shall denote by
Definition 2.6
Let
We shall denote by
and equip
Definition 2.7
Let
We shall denote by
The elements of the set
Definition 2.8
Let
We shall denote by
It is clear that we have the inclusion
2.4 Formula for composition of cosymplectic paths [17]
We have the following properties.
Let
(2.3)for all
If
(2.4)Similarly, if
(2.5)Let
(2.6)If
(2.7)
We shall often use the following important result in this article without mentioning it.
Lemma 2.9
[7,10] Let M be a manifold and
2.5 The
C
0
-topology
Let
2.6 Comparison of some norms
Consider a 1- form
where
Proposition 2.10
Let M and N be two smooth compact connected Riemannian manifolds. We have
i.e., the projection map
2.6.1 The Hodge norm
Given a Riemannian metric
Let
to be a fixed linear section of the natural projection
We shall call the 1-form
for all
be the canonical projection, where
namely
Any norm on
We have the following facts.
Lemma 2.11
Let M and N be two smooth manifolds and
where
Proof
Consider a vector field
modulo
Lemma 2.12
Let M and N be two smooth compact manifolds such that
Let
is linear, and there exists a universal constant
Proof
Linearity: Compute
That is,
Lemma 2.13
Let M be a smooth compact manifold equipped with a Riemannian metric g, and
the map
if we equip
Proof
Let
Composing the aforementioned equality with
This implies that,
and derive from the continuity of
3 The co-flux geometry
3.1 Some structures of
G
η
,
ω
(
M
)
The studies concerned with this subsection will need the following result found in [17].
Proposition 3.1
[17]. Let
is a Hamiltonian (resp. symplectic) isotopy of the symplectic manifold
with
is a Hamiltonian (resp. symplectic) isotopy of the symplectic manifold
We have the following results.
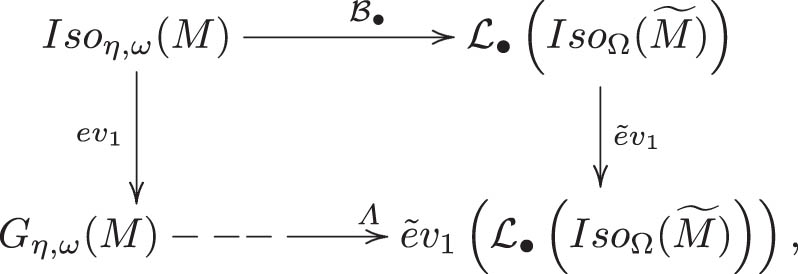
Lemma 3.2
Let
Proof
Consider the compact symplectic manifold
As in Proposition 3.1, for any loop
Thus, there is a map
Consider the natural projector
The following diagram consists of surjective maps:
This shows the existence of a surjective homomorphism
Lemma 3.3
Let
Proof
Assume
where the two spaces are equipped with the
and
Fix a continuous section
where
The inverse map of
and
Thus, the spaces
Proposition 3.4
Let
Proof
Choose a small
3.2 The co-flux homomorphism
It has been proved in [17] that not every closed 1-form of a cosymplectic manifold generates a cosymplectic vector field, but only those 1-forms that are constant along the Reeb vector field can generate a cosymplectic vector fields.
Lemma 3.5
[17]. Let
Remark 3.6
First of all, it should be noted that the vector field
Lemma 3.5 tells us that, in general, we do not know whether for every
is non-empty, since from
where
From the above study, we have the following well-defined surjective group homomorphism:
The surjectivity follows from Lemma 3.5: pick
Example 3.7
Consider the torus
is a cosymplectic isotopy, where
By construction, the homomorphism
Theorem 3.8
Let
Proof
Let
For simplification, writing
Also, we have
where Flux stands for the usual symplectic flux homomorphism [1]. We apply Lemma 2.13 to derive that
Applying Theorem 1.6 – [3], we derive that there exist constants
which implies that
W.l.o.g, we may assume that
Proposition 3.9
Let
Proof
Roughly speaking, we compute
Since
Now, we compose the aforementioned equality with
because
Finally, we obtain
Proposition 3.10
If
Proof
This is an adaptation of the proof of similar result from symplectic geometry [1].□
4 The map
S
η
,
ω
Let
The epimorphism

where
4.1 On the kernel of
S
η
,
ω
Proposition 4.1
The subgroup
Proof
Let
for all
and define another smooth family
for each
for all
Proposition 4.2
The subgroup
Proof
Pick
4.1.1 The subgroup
Γ
η
,
ω
The period group of
In fact,
We have the following fact.
Proposition 4.3
Let
Proof
Here, we consider the unit circle as the segment
Now, assume that
where
For (2), let
with
Conjecture (A). Let
Conjecture (B). Let
We have the following facts.
Proposition 4.4
Let
Lemma 4.5
Let
Proof
Let
for all
Here is a consequence of our study.
Proposition 4.6
The 3 rows of the following diagram are exact sequences.
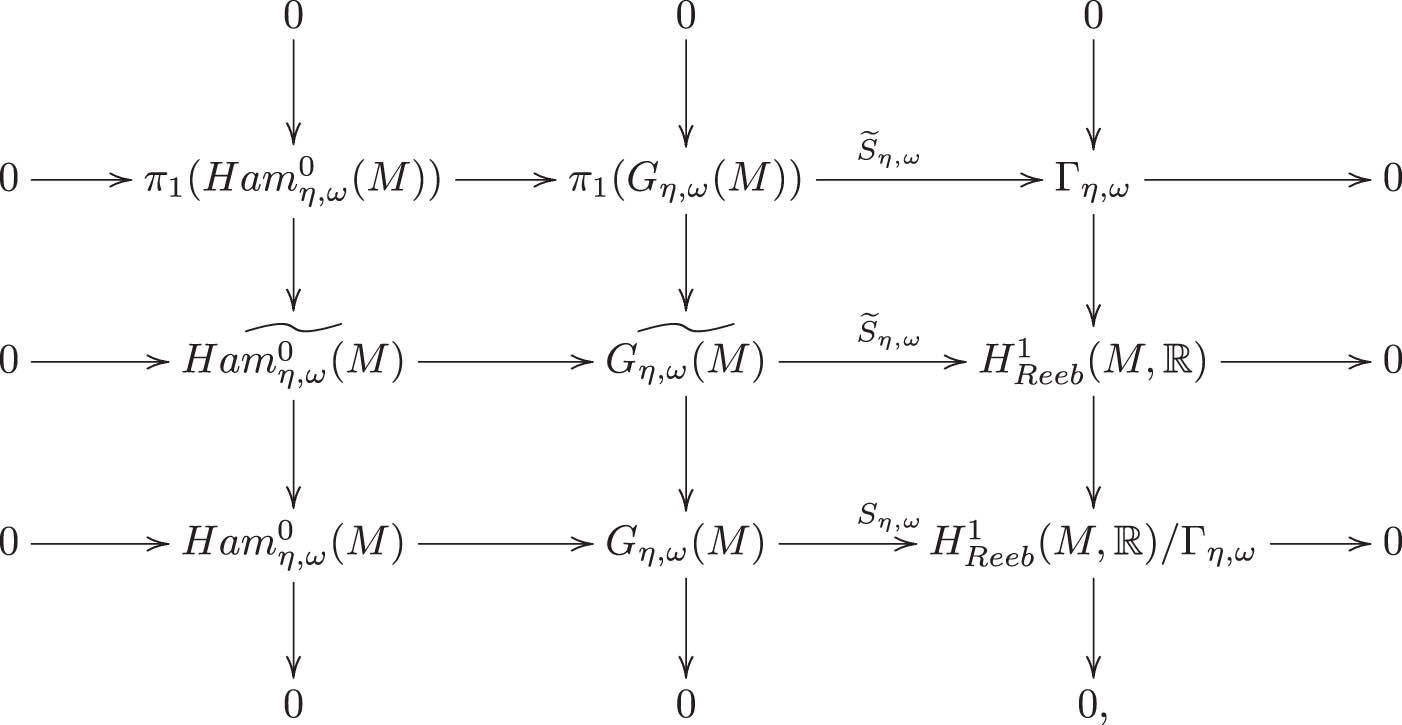 where the first two arrows are incluison mappings.
where the first two arrows are incluison mappings.
5 Regularization of co-Hamiltonian paths
Definition 5.1
Let
For this study, we shall need the following subsets:
For any element
Consider
Following the symplectic case, one can show that every co-Hamiltonian diffeomorphism
Assume that
Hence, applying a result of Polterovich [13], one obtains the desired result.
Definition 5.2
[13] A
Remark 5.3
(Existence of
Hence,
for each
Hence, it seems natural to construct
Proposition 5.4
Let
Proof
With the aid of Remark 5.3, one argues as in the proof of similar result from symplectic geometry (see Proposition 5.2.A-[13]).□
Let us introduce norms on
Lemma 5.5
Let
Proof
This is an adaptation of similar result found in the symplectic case [13].□
Here is a consequence of Lemma 5.5.
Lemma 5.6
Let
Proof
By definition, we have
On the other hand,
Therefore, the desired result follows from Lemma 5.5.□
6 Locally conformal cosymplectic stability
Definition 6.1
[5] Let
It is known that the local 1-forms
In [5], it is shown that if there is a 1-form satisfying (6.2), then we can obtain a system
Furthermore, one can show that the de Rham cohomology class of the Lee forms are invariant of the l.c.c. structure since a conformal rescaling of
6.1 Lichnerowicz’ cohomology
Lichnerowicz’ cohomology, also known in the literature as Morse-Novikov cohomology, is a cohomology defined for a smooth manifold
for all
where
This shows that multiplication by
Theorem 6.2
(Locally conformal cosymplectic stability) Let M be a smooth closed manifold of dimension
Proof
We shall adapt the proof of similar result from symplectic geometry. After a suitable rescaling, we suppose that there exists a smooth isotopy
Similarly, we have
for each
because (6.6) together with the condition
In the statement of Theorem 6.2, the third condition shows that one cannot avoid the Reeb vector field when studying cosymplectic dynamical systems. Assuming that the Lee forms are time-independent, the above stability theorem implies the following statements.
Corollary 6.3
(Stability
Lemma 6.4
(Stability
Proof
We shall adapt the proof given in [2]. First, we use the fact that the Lee forms
Similarly, one obtains
Therefore, combining (6.7) and (6.8) together with condition
Acknowledgments
The author is thankful to the anonymous reviewers for their profound and contribuable comments and to the editor for considering this work. I dedicate this work to the late Dr. Mohamed Kampo who died so soon after defending his Ph.D in mathematics, and faraway from his family : his kindness and his capacity for insight will be forever missed.
-
Funding information: No funding was received for the accomplishment of this work.
-
Conflict of interest: The author states no conflict of interest.
References
[1] A. Banyaga, Sur la structure des difféomorphismes qui préservent une forme symplectique, Comment. Math. Helv. 53 (1978), 174–2227. 10.1007/BF02566074Search in Google Scholar
[2] G. Bande and D. Kotschick, Moser stability for locally conformally symplectic structures, Proc. Amer. Math. Sco. 137 (2009), no. 7, 2419–2424. 10.1090/S0002-9939-09-09821-9Search in Google Scholar
[3] L. Buhovsky, Towards the C0-flux conjecture, Algebraic Geometr. Topol. 14 (2014), 3493–3508. 10.2140/agt.2014.14.3493Search in Google Scholar
[4] B. Cappelletti-Montano, A. De Nicola, and I. Yudin, A survey on cosymplectic geometry, Rev. Math. Phys. 25 (2013), no. 10, 1343002. 10.1142/S0129055X13430022Search in Google Scholar
[5] D. Chinea, M. de Leon, and J. C. Marrero, Locally conformal cosymplectic manifolds and time-dependent Hamiltonian systems, Comment. Math. Univ. Carolin. 32 (1991), 383–387. Search in Google Scholar
[6] F. Gallissot, Formes exterieurs en Mécanique, Thèse. Ann. Inst. Fourier 4 (1954), 145–297. 10.5802/aif.49Search in Google Scholar
[7] H. Li, Topology of cosymplectic/cokaehler manifolds, Asian J. Math. 12 (2008), no 4, 527–544. 10.4310/AJM.2008.v12.n4.a7Search in Google Scholar
[8] M. Hirsch, Differential Topology, Graduate Texts in Mathematics, vol. 3, No. 33, Springer Verlag, New York-Heidelberg, 1976; corrected reprint (1994). 10.1007/978-1-4684-9449-5Search in Google Scholar
[9] C. Ida, A note on the basic Lichnerowicz cohomology of transversally locally conformally Kahlerian foliations, Hacettepe J. Math. Stat. 43 (2014), no. 3, 413–423. Search in Google Scholar
[10] M. de Léon and M. Saralegi, Reduction for singular momentum maps, J. Phys. A 26 (1993), no. 19, 5033–5043. 10.1088/0305-4470/26/19/032Search in Google Scholar
[11] P. Libermann, Les automorphismes infinitesimaux symplectiques et des structures de contact, Coll Geom. Diff. Globales Bruxelles (1958), Louvain (1959), pp. 37–59.Search in Google Scholar
[12] A. Lichnerowicz, Coll Geom. Diff., Globales Bruxelles, 1958. Search in Google Scholar
[13] L. Polterovich, The Geometry of the Group of Symplectic Diffeomorphism, Lecture in Mathematics ETH Zü rich, Birkhäuser Verlag, Basel-Boston, 2001. 10.1007/978-3-0348-8299-6Search in Google Scholar
[14] G. de Rham, Form Differentiali et loro integrali, C.I.M.E 2 ciclo, Saltino, Vallombrossa, Agosto, 1960, p. 21. Search in Google Scholar
[15] M. Shafiee, On the relation between cosymplectic and symplectic structures, J. Geom. Phy. 178 (2022), 104–536. 10.1016/j.geomphys.2022.104538Search in Google Scholar
[16] S. Tchuiaga, On symplectic dynamics, Differ. Geom. Appl. 61 (2018), 170–196. 10.1016/j.difgeo.2018.09.003Search in Google Scholar
[17] S. Tchuiaga, F. Houenou, and P. Bikorimana, On cosymplectic dynamics I, Complex Manifolds 9 (2022), 114–137. 10.1515/coma-2021-0132Search in Google Scholar
[18] F. Warner, Foundation of differentiable manifolds and Lie groups, Graduate Texts in Mathematics, vol. 94, Springer-Verlag, New York, 1983. 10.1007/978-1-4757-1799-0Search in Google Scholar
[19] A. Weinstein, Symplectic manifolds and their Lagrangian submanifolds, Adv. Math. 6 (1971), 329–345. 10.1016/0001-8708(71)90020-XSearch in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Differential geometric global smoothings of simple normal crossing complex surfaces with trivial canonical bundle
- Chow transformation of coherent sheaves
-
On the algebra generated by
- Second Chern-Einstein metrics on four-dimensional almost-Hermitian manifolds
- Towards the cosymplectic topology
- Quot schemes and Fourier-Mukai transformation
- Deformations of astheno-Kähler metrics
- Partial slice regularity and Fueter's theorem in several quaternionic variables
- Special Issue: Non-Kaehler Geometry
- Bott-Chern hypercohomology and bimeromorphic invariants
- Moduli spaces of stably irreducible sheaves on Kodaira surfaces
Articles in the same Issue
- Research Articles
- Differential geometric global smoothings of simple normal crossing complex surfaces with trivial canonical bundle
- Chow transformation of coherent sheaves
-
On the algebra generated by
- Second Chern-Einstein metrics on four-dimensional almost-Hermitian manifolds
- Towards the cosymplectic topology
- Quot schemes and Fourier-Mukai transformation
- Deformations of astheno-Kähler metrics
- Partial slice regularity and Fueter's theorem in several quaternionic variables
- Special Issue: Non-Kaehler Geometry
- Bott-Chern hypercohomology and bimeromorphic invariants
- Moduli spaces of stably irreducible sheaves on Kodaira surfaces