
Two-dimensional graph model for epitaxial crystal growth with adatoms
-
Riccardo Cristoferi


Abstract
We consider a model to describe stable configurations in epitaxial growth of crystals in the two-dimensional case, and in the regime of linearized elasticity. The novelty is that the model also takes into consideration the adatom density on the surface of the film. These are behind the main mechanisms of crystal growth and formation of islands (or quantum dots). The main result of the paper is the integral representation of the relaxed energy.
1 Introduction
The ability to grow thin films of crystal over a substrate is a technology that has applications in several areas, from surface coating, to lithography. Practitioners developed several techniques to grow crystals over a substrate. Vapor deposition techniques are among the most important and implemented: the substrate is immersed in a vapor, and mass transfer from the latter to the former is responsible for the growth of the crystal. In order for the crystal to growth, two conditions need to be satisfied: the vapor has to be saturated, and the substrate is kept at a significantly lower temperature than the vapor. The former ensures attachment of vapor atoms on the substrate, while the latter quick thermalization of deposited atoms. In particular, this implies that the entropic free energy is reduced after attachment.
In order to grow a crystal (namely, an ordered structure), attached atoms, called adatoms, need to have sufficient energy to move from the landing location to a position of equilibrium. This depends on the type of materials used in the vapor and for the substrate. Surface diffusion of adatoms is therefore the mechanism used by thin films to growth as a crystal.
If the growth process is made in such a way that the first layers of the film arrange in the same lattice structure of the substrate, the growth is called epitaxial. Of course, the atoms of the deposited material are stretched or compressed, since they are not in their (sometimes, stress free) natural configuration.
The dynamic of the crystal growth process is extremely complicated, and it is influenced by many factors. In particular, the ratio between the tendency of the adatoms to stick to the substrate and their tendency to diffuse. Three modes of growth are defined based on this ratio: the Frank–van der Merwe growth mode, where diffusion is stronger and thus the crystal growth layer by layer, the Volmer–Weber growth mode, where diffusion is weaker, and therefore adatoms tend to form islands on the substrate, and an intermediate one, the Stranski–Krastanov growth mode, where the first monolayers of the film behave like in a Frank–van der Merwe growth mode, while after a certain threshold, it starts forming islands. Here we consider the latter case.
In the epitaxial Stranski–Krastanov growth mode, it is observed that, after a few monolayer of material are deposited, the film accumulates too much elastic energy that it is no more energetically convenient for atoms of the film to stick to the crystalline structure of the substrate. Thus, relaxation processes are employed in order to reduce the total energy of the system. The most important ones are corrugation of the surface, and creation of defects. These are known in the literature as stress driven rearrangement instabilities (see [22]). The former is responsible for non-flat surfaces as well as for the appearance of islands (agglomerates of atoms, also called quantum dots) on the surface. With the latter, instead, the film introduces singularities in its crystalline structure, such as cracks and dislocations.
It is extremely important to be able to control this complex process in such a way to reduce impurities as much as possible, or at least to be able to quantify them.
The physical literature on crystal growth is extremely vast. Here we limit ourselves to mention the pioneering work [24] by Spencer and Tersoff.
From the mathematical point of view, several investigation have been carried out, focusing on different aspects of the growth process. There are both discrete models, and continuum ones. Here we focus on these latter. In particular, the work [4] by Bonnetier and Chambolle laid the foundations for rigorous mathematical investigations of stable equilibrium configurations of epitaxially strained elastic thin films in the linear elastic regime. The authors considered the two-dimensional case and proved an integral representation formula for the relaxed energy with respect to the natural topology of the problem, as well as a phase field approximation. In [15], Fonseca, Fusco, Leoni, and Morini proved a similar result by using an independent strategy, and also investigated the regularity of configurations locally minimizing the energy.
Questions about the stability of the flat profile were investigate by Fusco and Morini in [20] for the case of linear elasticity, and in [3] by Bonacini in the nonlinear regime. Moreover, in [2], Bonacini considered the same question for the case where surface energy is anisotropic, showing, surprisingly, that the flat interface is always stable.
It was not until 2019, with the work [12] by Crismale and Friedrich that the three-dimensional case was considered. Indeed, despite the existence of investigations for similar functionals in higher dimension (see the work [11] by Chambolle and Solci, and [7] by Braides, Chambolle, and Solci for the study of material void) were available, all of them considered elastic energies depending on the full gradient of the displacement. On the other hand, it is known that physically compatible models for elasticity must depend on the symmetrized gradient. The reason for such a time gap between the two and the three-dimensional case was technical: it was not clear how to get compactness of a sequence of configurations with uniformly bounded energy. This required the introduction of a new functional space: GSBD, the space of Generalized Functions of Bounded Deformation, designed in the work [13] by Dal Maso in 2014 specifically to address such an issue.
What all of the above continuum models are neglecting is the role of adatoms in the creation of equilibrium stable interfaces. The importance of considering their effect was made clear by Specer and Tersoff in [24], where the authors highlighted that considering the effect of adatoms, and in particular of surface segregation of several species of deposited material, will change the equilibrium configurations predicted by the model, and hopefully provide a more accurate description of those observed in experiments.
This was made even clearer in the seminal paper [19] by Fried and Gurtin. The manuscript unified several ad hoc investigations that focused on specific aspects on crystal growth or used specific assumptions to derive the model. In particular, it was noted that considering adatoms will, on the one hand, add a new variable to the problem, while, on the other hand, will make the evolution equations parabolic. Note that this is a huge mathematical advantage, since in [16] and in [17], the authors had to add an extra term to the energy (that nevertheless has some physical interpretation) to regularize the non-parabolic evolution equations obtained from the model that does not take into consideration adatoms.
Following this direction of investigation, in [10], the first author, together with Caroccia and Dietrich, started the study of a variational characterization of the evolution equations derived by Fried and Gurtin. In that paper, the authors considered a variational model describing the equilibrium shape of a crystal, where the elastic energy is neglected, and the crystal can grow without the graph constraint. From the energy for regular configurations, a natural topology was identified, and a representation formula for the relaxed energy was obtained. The result highlighted the interplay between oscillations of crystal surfaces and changes in adatom density in order to lower the total energy. The result obtained in that paper was different from previous investigations by Bouchitté (see [5]), Bouchitté and Buttazzo (see [6]), and Buttazzo and Freddi (see [8]), due to the choice of the topology.
In a subsequent paper (see [9]), a phase field model was considered in a more general setting, to pave the way towards the analysis of the convergence of the gradient flows.
In this paper, we continue this line of research by considering the case where the material is deposited on a substrate, its profile can be described by a function, and the elastic energy of the film is considered, as well as the surface energy of adatoms. The goal is to obtain a representation formula for the relaxed energy in the natural topology of the problem. In order to develop the main ideas needed for such an investigation, this paper focus on the two-dimensional case. The main contribution of the paper is to show how the mechanism identified in [10] where oscillations of the profile interact with adatom concentration plays a role in the case where the geometry of the configuration is constrained to be a graph. This might seem as an easier case than that treated in [10], where the profile of the crystal was free to growth in any direction. Nevertheless, the graph constraint poses several challenges that have to be tackled with the utmost care, in order to be properly overcome. Indeed, we prove that the relaxed energy differs from that of [10] exactly on vertical cracks of the deposited layer. In particular, we introduce a strategy to deal with oscillations and adatom concentration on vertical cracks, whose robustness will be tested in a forthcoming paper where we will investigate a phase-field approximation of the model and another where we will treat the three-dimensional case.
Forthcoming papers will also consider the dynamics of the model, and the situation when multiple species of materials are deposited at the same time.
1.1 The model
In this section we introduce the model that we will study. We consider the two-dimensional case. This corresponds to three-dimensional configurations that are constant in one direction. We work within the continuum theory of epitaxial growth. The main assumptions of the model are the following:
The profile of the configurations of the thin film can be described as the graph of a function;
We neglect surface stress;
The exchange of atoms between the substrate and the deposited film is negligible;
The atoms of the substrate do not change position.
The free energy of a configuration is the sum of a bulk energy and a surface energy. The former is the elastic energy due to rearrangement of the atoms of the deposited film from a stress free configuration (atoms sitting in their natural lattice position) to another disposition. The latter, instead, stems from the net work needed to create an interface with a specific density of adatoms. We first prescribe the energy of regular configurations, and will then obtain that of more irregular configurations by relaxing the former.
We model the substrate as the set
and its sub-graph (see Figure 2 on the left)
The set
where with
Note that such a requirement has the physical interpretation that no matter what the adatom density is, there is always an amount of energy needed to construct a profile.
We now discuss the elastic energy.
For each macroscopic configuration
Here,
where
Finally, we assume that the substrate and the film share similar elastic properties, so they are described by the same positive definite elasticity tensor
for a
Therefore, the energy of a regular configuration that we consider is given by
where
1.2 The main result
In order to study the relaxation of the energy
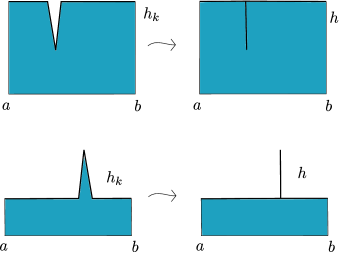
Two ways that a sequence of graphs can close up: on the top by giving rise to a crack inside
We first consider the notion of convergence for the profiles of the film.
This will be the same used in [15]. Here we give the heuristics for such a choice. There are several mechanisms that a film can use to release elastic energy. Our model allows for three of these: rearrangement of atoms inside the film, corrugation of the surface, and creation of cracks.
The topology on the profile will be concerned only with the last two.
How can a crack form? There are two mechanisms: as a fracture inside the film, or when the free profile becomes vertical, like it is depicted in Figure 1 on the top. We choose to model situations where only the latter is allowed.
Note that this forces cracks to be vertical segments touching the free profile.
What we want to avoid are configurations where cracks happen outside of the film (Figure 1 on the bottom). Thus, we need to differentiate the two situations. The right way to do it is by considering the Hausdorff convergence of the complement of the sub-graphs (the so-called Hausdorff-complement topology).
We note that, in the latter case, the sets
We now consider the convergence of the displacements. Since the energy has quadratic growth in the symmetric gradient of the displacement, the natural topology will be the weak
Finally, we discuss the topology for the adatom density.
In [10] the idea was to see the adatom density as a Radon measure μ concentrated on the graph describing the profile. Namely, for each
This identification allows not only to consider concentration of measures, but it turns out to be the right way to model adatoms in order to exploit the interplay between oscillations of the profile and change in adatom density. Thus, for the adatom density, the weak
The question we now have to address is what are the possible limiting objects that we need to consider. This is a discussion of compactness of sequences
We start by investigating the convergence of graphs, and the others will follow.
Thanks to the lower bound (1.3) on the energy density ψ, the energy
which in turn is a lower bound on the total variation of
Thus, if a mass constraint on the area of
Now, we consider the convergence of the displacement. Due to the choice of the topology, the limiting displacement will be a function
Finally, let us discuss the adatom densities. Each of them is seen as the Radon measure
Therefore, the class
Thus, in light of the above discussion, given a sequence
as
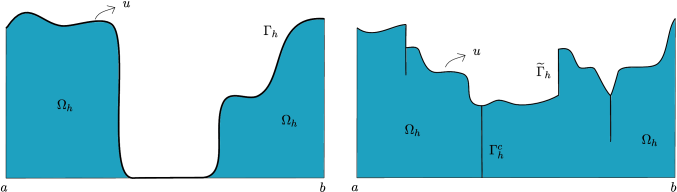
A regular configuration on the left, and a possible limiting configuration on the right: cracks and jumps can appear.
The two main results of this paper provide representations of the relaxation of the functional
Theorem 1.1.
Let
where
for all
is the common recession coefficient of
Theorem 1.2.
Fix
and by
Define
Then the relaxation of
where
Remark 1.3.
In general, it is not possible to say more on the singular part of the measure.
Remark 1.4.
The more general case, where the adatom density is vector valued (corresponding to different materials deposited on the substrate) and the surface energy is anisotropic are currently under investigation.
2 Strategy of the proof
Now, we would like to comment on the strategy to prove the main results. First of all, in Theorem 6.1 we will prove the liminf inequality for the case of no mass constraint, and in Theorem 7.1 the limsup inequality for the case with the mass constraint. These theorems will give both Theorem 1.1, and Theorem 1.2.
Similarly for functional considered in [15], the bulk and the surface terms of the energy do not interact in the relaxation process. Since the former is quite standard, we will comment on how to deal with the latter. In this lies the novelty of the paper. Our strategy relies on ideas inspired by results obtained in [10].
The main difference with the case treated in that paper is the graph constraint. This reflects on the fact that oscillations of the thin film profile must be in the vertical direction in order to preserve such a constraint, and that cracks can be created only in a specific way. The former term only gives technical challenges, while the latter is responsible for the different energy densities
Let us discuss the strategy for the liminf inequality for the surface terms. We avoid mentioning the fine details and focus instead on the main ideas.
Let
The idea is to separate the contribution that the energy on the left-hand side has
on a neighborhood of each cut of h, and on the other part of the graph of h.
Despite there might be a countable number of cuts, it is just a technicality to show that we can reduce to finitely many of them (see the beginning of the proof of Theorem 6.1).
Thus, let us assume that the final configuration described by h has finitely many cuts. Since the energy is local, for the sake of simplicity, we will consider the case where there is one single cut. In case the measure μ has a Dirac delta at the point P (see Figure 3), we want to count its contribution to the energy as part of the energy of the regular part of
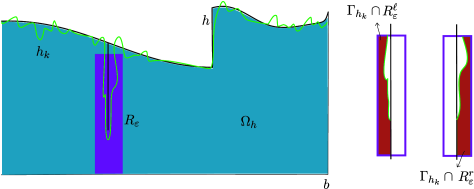
In order to get the liminf inequality, we separate the effects on a neighborhood
Now, we claim that
and that
Given (2.2) and (2.3), we obtain the desired liminf inequality (2.1) by sending ε to zero.
To obtain both (2.2) and (2.3), we rely on (a localized version of) the lower semicontinuity result proved in [10, Theorem 5] (see Theorem 3.18).
In the first case, the idea is to view the graph of each
For (2.3), we instead have to consider the contributions of the surface energy from both sides of the crack. Therefore, we reason as follows: the rectangle
and
Thus, thanks to the lower semicontinuity result (see Theorem 3.18), we get that
and
We then show that
This gives (2.3), and, in turn, the desired liminf inequality for the surface energy.
We now discuss the strategy for the limsup inequality for the surface energy. This is more involved, and requires several steps.
The idea is to reduce to the situation where the limiting profile h is Lipschitz, and the adatom measure μ is a piecewise constant density (more precisely, it is possible to find a square grid where the density has the same value on each of the parts of the graph inside each of these squares).
In such a case, in Proposition 7.8 we construct a sequence
Without loss of generality (see Lemma 3.16), we can assume ψ to be convex. Then ψ and
for some
and
In order to reduce from a general profile
This is done in Proposition 7.7. In order to obtain the approximation of the profiles, we employ an idea by Bonnettier and Chambolle in [4, Section 5.2], later adapted to the case of graphs in [15, Lemma 2.7]: to use the Moreau–Yosida transform to define a Lipschitz approximation of h to the left and to the right of each cut (again, we are reducing to the case of finitely many of them). To also approximate the cracks, we use a linear interpolation. As for defining the adatom density on the graph of
3 Preliminaries
We here introduce the main definition and basic results that will be used throughout the paper.
3.1 Function of (pointwise) bounded variation in one dimension
We start with functions of (pointwise) bounded variation in one dimension. A comprehensive treatment of this topic can be found in the book [23] by Leoni.
Definition 3.1.
Let
where the supremum is taken over all finite partitions of
The main properties of functions of pointwise bounded variations that will be used in the paper are collected in the following result (see [23, Theorem 2.17, Theorem 2.36]).
Theorem 3.2.
Let
exist for all
we have that there are at most countably many points
We now connect functions of pointwise bounded variation with those of bounded variation.
Definition 3.3.
Let
for all
The relation between functions of pointwise bounded variation and functions of bounded variation is given by the following result (see [23, Theorem 7.3]).
Theorem 3.4.
Let
Finally, we recall that the subgraph of a function of bounded variation is a set of finite perimeter (see [21, Theorem 14.6]), and that its reduced boundary coincides with the non-cut part of the extended graph (see [14, Theorem 4.5.9 (3)].
Lemma 3.5.
Let
where
3.2 Hausdorff convergence
We now introduce the Hausdorff metric.
Definition 3.6.
Let
where, for
In order for the Hausdorff distance to actually be a distance, we need to work with compact sets. This will also give compactness of the metric space. This latter fact is known as Blaschke Theorem (see [1, Theorem 6.1]).
Theorem 3.7 (Blaschke Theorem).
The family of compact sets of
The convergence of epigraphs in the Hausdorff-complement topology we use implies their
Lemma 3.8.
Let
for some open set
We now relate the Hausdorff metric with the notion of Kuratowski convergence (see [1, Theorem 6.1]).
Proposition 3.9.
Let
Any cluster point of a sequence
For any
These equivalent properties are those defining the so-called Kuratowski convergence.
3.3 On the surface energy
Here we introduce all the notation and recall the result that are needed to treat the surface term.
Definition 3.10.
A function
for any
Definition 3.11.
Let
for all
Remark 3.12.
Note that
Definition 3.13.
Let
for all
Remark 3.14.
It is easy to see that the function
Moreover, note that
We recall two results on the surface energy. The first is a combination of [10, Lemma A.11] and [9, Lemma 2.2].
Definition 3.15.
Let
for all
Lemma 3.16.
Let
Namely, in order to compute the convex sub-additive envelope of ψ, we can assume, without loss of generality, that ψ is convex.
Moreover, assume ψ to be convex. Then there exists
for some
Remark 3.17.
Note that, if ψ is differentiable at
The following result proved in [10, Theorem 3] gives a lower bound for the surface energy.
Theorem 3.18.
Let
Then
where
4 Setting
In this section we give the rigorous definitions of the objects discussed in the introduction. We start with the set of admissible configurations.
Definition 4.1.
Let
for some
Definition 4.2.
Fix
We now define the energy for regular configurations.
Definition 4.3.
Next, we introduce the energy for regular configurations. We define
for every
We now introduce the more general configurations that will be treated.
Definition 4.4.
Let
where
Definition 4.5.
Fix
In order to define the relaxed energy, we need to introduce some notation.
Remark 4.6.
In Theorem 3.2 we introduced the functions
In particular, if
Definition 4.7.
Let
the extended graph of h. Moreover, we define:
the jump part of
the cut part of
the regular part of
Moreover, we introduce the notation
Remark 4.8.
Note that
holds for every
We now define the notion of convergence that we are going to use to study our functionals.
Definition 4.9.
We say that a sequence
as
Remark 4.10.
Note that, if
Now we are going to define the setting for our relaxed functional.
Definition 4.11.
Let
respectively, where
In Lemma 5.2 we will prove that
Definition 4.12.
Let
where θ is the common recession coefficient of
5 Technical results
In this section we collect the main technical results that will be needed in the proof of the integral representation of the relaxation.
Lemma 5.1.
Let
Proof.
We divide the proof into two steps.
Step 1: We prove that
Thus,
where last inequality follows from the sub-additivity of
for every
Step 2: We prove that
Note that
Thus, we get that
where, in the second step, we used the convexity of
We now prove that the recession coefficients of
Lemma 5.2.
Let
Proof.
We first prove that
We now prove that
Then we get
where last inequality follows from the sub-additivity of
This concludes the proof. ∎
An important result that will be used several times is the following.
Lemma 5.3.
Let
Then
Proof.
By [1, Corollary 3.33], it holds that
where S denotes the set of points
Notice that the set
We now prove a result that will be needed in the limsup inequality.
Lemma 5.4.
Let
Let
satisfies:
The intersection between the graph of h and the boundary of the new grid is finite, namely
We have that
for every
Proof.
We first prove (a). We first consider an horizontal translation. Since
Now we need to find a suitable vertical translation. Using the coarea formula (see [1, Theorem 3.40]), we infer that
for almost every
Thus, we obtain that
for almost every
By definition, we have that
We now claim that
First, note that if
By definition
The claim follows from the above equality.
By proving the claim, we infer the existence of
In conclusion the translation
We now prove part (b). Let
Fix
We will prove that there exists
for all
as desired. Since
We now prove the opposite implication. Let
Then, by Kuratowski convergence and the fact that
Again, let
Setting
Finally, we prove a result about the so-called wriggling process. This was introduced in [10, Lemma 4] to exploit the quantitative loss of lower semicontinuity of the perimeter in order to recover the relaxed energy density from ψ. The difference with this latter is that, in our case, only vertical perturbations are allowed. Moreover, we impose the oscillating profiles to stay below the given function.
Proposition 5.5.
Let
where we used the notation
Proof.
We divide the proof into two steps.
Step 1. Fix
Notice that if
For each
First of all, note that
We claim that it is possible to chose
where
We claim that:
Therefore, since
Step 1.1. We now prove claim (a). First, notice that
Now, fix
We now prove that
In order to do so, we first show that
and extend it periodically on
By applying the Riemann–Lebesgue Lemma, we get that
as
and that
As
we can define the following families of intervals. Set
Then, by (5.5), we have
Since
where
Note that for every
where
from (5), and from
Thus, from (5.3) and (5.8), we conclude that
Step 1.2. Now we prove claim (b). Notice that
Since the sequence
Thus, letting
This concludes the proof of (b).
Step 2. We now prove the statement of the lemma. Fix
for all
and such that
for all
for
It remains to prove property (v). To do so, fix
Moreover, from the fact that
Using (5.10), we get
where in the previous to last step we used (5.11), while last step follows from
Thus, since ε is arbitrary, we get that
Remark 5.6.
From the above proof, we can infer the following facts:
Following (5.8),
where
If we solve for
(5.13)where
We claim that
for some
for every k. From the inequality
we infer that
(5.14)From Step 1 we know that
(5.15)with
From the expression of
As
6 Liminf inequality
We now present the main ideas of the proof of the liminf inequality, contained in the following theorem. One of the issues that we take in account is the fact that our final configuration Γ, is the graph of a
Theorem 6.1.
For every configuration
Proof.
Fix
By a standard measure theory argument, it is possible to choose ε such that
as
Fix
which contradicts our convergence above. Vice versa, if
Around each vertical cut, we set, for each
and
Thanks to the existence of the right and left limits of h at every point (see Theorem 3.2), up to further reducing δ, we can assume that
Now we split the energy in the following way. Take any
We are going to estimate each term on the right-hand side of (6) separately.
The rectangles we are using for the estimate of the liminf. In particular, the set
Step 1. Here we estimate the bulk term on the right-hand side of (6). Since
as
we get the liminf for the bulk term.
Step 2. For the second term on the right-hand side of (6), we would like to apply Theorem 3.18.
Fix
We have that
By definition, we can write
as
as desired.
Step 3. We now deal with the third term on the right-hand side of (6). Define
Using Lemma 3.8 we obtain that
as
We now define the densities
We now prove that
for some
and
where
holds for every
where L is a constant independent of A, and is given by the fact that the sequence
as
We claim that
and this implies that
Then there are
with
as
Since
We now prove the convergence of the energy. Set
We notice that
Now, we want to apply Theorem 3.18.
Recalling Definition 6.5 of the sets
where the last inequality follows from (6.6) together with the definition of
for all
Step 5. Using (6), (6.3), (6.4) and (6.9) we obtain
By letting
7 Limsup inequality
The goal of this section is to prove the limsup inequality for the mass constrained problem. We recall that the classes
Theorem 7.1.
Let
and with
The proof is long and therefore it will be divided in several steps, each proved in a separate result. In particular, we will need to work with a specific class of piecewise constant functions, that we introduce here.
Definition 7.2.
Let
the side lengths of each
it holds
A simple result that will be use repeatedly without mentioning it is the following (see (a) of 5.4).
Lemma 7.3.
Let
Definition 7.4.
Let
We are now in a position to explain the steps of the strategy that we will use in order to prove Theorem 7.1.
Step 1. For any configuration
This will be proved in Proposition 7.6.
Step 2. Let
Step 3. For every configuration
Step 4. From Propositions 7.6, 7.7 and 7.8 and a diagonalization argument we get the limsup inequality.
We now carry on Step 1: approximate any admissible configuration with a sequence of configurations where the density is grid constant.
Proposition 7.6.
Let
where
Proof.
We divide the proof into four steps.
Step 1. Given
and set
where, for every
for every
Step 2.
Now, consider
We notice that
Fix
for all
and
We now define a density on Γ. For
Note that the function
By definition, it follows directly that the mass constrained is satisfied, namely that
Step 3. We now prove that
for every
and we estimate the two terms on the right-hand side of (7) separately. We have that
where we used the fact that
Finally, from (7), (7) and (7.7), we get
As
Step 4. We now prove the convergence of the energy. We will prove that
Since the bulk term of the energy is unchanged, we estimate the other contributions. We have that
where in the first inequality we used the sub-additivity of
By construction, we have that (7.2) and (7.3) hold. Thus, from (7), we obtain
From (7), since ε is arbitrary, we can conclude
This concludes the proof. ∎
We proceed our analysis with the second step, which will allows us to reduce to the case of a Lipschitz profile and a grid constant adatom density.
Proposition 7.7.
Let
where
and
Proof.
The strategy of the proof is the following. In Step 1 we show that it suffices to build the required sequence in case h has finitely many cut points. In Step 2 we build the recovery sequence. Finally, in Step 3 we show the convergence of the energy.
Step 1. In this first step we are going to show that it suffices to prove the result in the case h has a finite number of cuts.
Namely, we prove that there exist sequences
and
The following construction is inspired by [15, Theorem 2.8].
For
for every
for each k, where
Set
We now need, for each
For
For each
where
We notice that, by using (7.11),
In order to reduce to a finite number of cuts, we do the following: first, we shift down by
Step 1.1. Note that, by definition, the sequences
Step 1.2. We now prove that
as
We now prove that
Then, for k large enough,
Here we notice that
Step 1.3. Finally, we prove the convergence of the energy. First, by a standard argument, we can reduce to the case
Regarding the bulk term on the right-hand side of (7), since
Remember that, by construction,
Notice that the first term on the right-hand side of (7) is zero, whereas, by Dominated Convergence Theorem, we can conclude that the second term is going to zero as
We now consider the surface terms on the right-hand side of (7). From (7.13), we can choose k large enough so that
For the first term, we get
Now we use (7.16), together with
and we conclude the convergence to 0 of the surface term in (7.17), as
From (7.16) and since
for
By putting together (7), (7.17) and (7.18) in (7), we get that
Step 2. Now, consider
In order to lighten the notation, and since we are considering a function h which has a finite number of cut points, we can work as h had a single cut and then repeating the following construction for the general case. So let c be the cut point of h.
The idea of the construction is to use a Yosida–Moreau transform far from the cut point
We define, for each
We have that both
as
where
with suitable coefficients
where
We then have that the sequence
Step 2.1. For every
Next we deal the case in which
for every
In case
We are left to check the second condition of the Kuratowski convergence. Take a sequence
and suppose that
In case our sequence
Thus, we can conclude that
Step 2.2. We are going to define a density on
We now define two index sets
In order to define what follows, we recall Lemma 5.4. The density is then defined as
where
and
As the size of the squares is fixed, we take k large enough such that the vertical strip
For each
where in the previous to last step we used (7.21).
Step 2.3. We prove that
We now compute first the sum over the indexes in
We now estimate the sum over
for all
In the same way, we can obtain the estimate for last two terms of the sum over
for some constant
with
Step 2.4.
Arguing as in (7.12), we can define the displacement sequence
Step 2.5. It remains to prove the convergence of the energy. By using the index sets in (7.20), we have that
We will estimate the four terms on the right-hand side of (7) separately. For the bulk term, we can use the same method as in (7) and we conclude that
as
We now consider the first sum on the right-hand side of (7). We have that
From the fact that
and
Then, from (7) we have that
As ε is arbitrary, we can conclude our estimate.
Regarding the second sum on the right-hand side of (7), we use the a similar method as in (7). Now, for the first two terms can be estimated as follows:
By using the same argument that led us to (7.30), consider
and, by the continuity of
As a consequence, from (7) we get
Now, we conclude our estimate by using (7.22) and the fact that ε is arbitrary.
The third sum in the right-hand side of (7) can be treated in the same way as before.
Consider
and
Thus, we have
Since ε is arbitrary and from the fact that
By putting together (7.28), (7.30), (7) and (7) in (7), we conclude that
Proposition 7.8.
Let
and
Proof.
We divide the proof into seven steps.
Step 1. Denote by
It is well known (see, for instance, [18, Theorem 5.32 and Remark 5.33]) that for any given density
In particular,
Step 2. Take any configuration
for each
for every
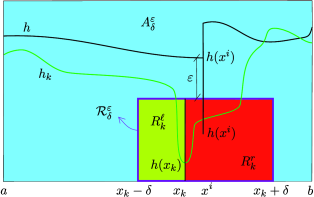
![Figure 6
On each interval
[
x
i
,
x
i
+
1
]
{[x^{i},x^{i+1}]}
, depending on whether
u
j
>
s
0
{u^{j}>s_{0}}
or not, we will apply the wriggling process and change the density to
s
0
{s_{0}}
, or do not change anything.](/document/doi/10.1515/acv-2024-0015/asset/graphic/j_acv-2024-0015_fig_0006.png)
On each interval
Define the index sets
where
and we have, on each interval
Then we define the Lipschitz sequence
By setting
We have that the sequence
where in the third to last step we used the fact that
for every
Step 3. Since in general
and we have that
Now the sequence
Now, let
we need to define a new sequence of density
Thus we set, for each
with
Notice that
Step 4. We now prove the convergence of the density, namely
Take any
then
Up to refining the intervals
Let
Moreover, for every l, consider
We then have
Now, by using condition (7.35) we get
where we can conclude as ε was arbitrary.
In order to prove that
Regarding the first term on the right-hand side of (7), we have that the sequence
Now, we estimate the remaining two terms on the right-hand side of (7). Let
Since the function
Thus we have
Then the first term on the right-hand side of (7) can be estimated by using (7.41) and we get
where
The second term on the right-hand side of (7) is estimated by using the uniform continuity of φ. Since there is
As a consequence, by using a similar approach as in (7.37), we get
where
By putting (7.43) and (7.44) in (7.41), we get that
Now, by putting (7.40) and (7.45) in (7) we get
Finally, by using (7.38) and (7.46) we get
we can conclude since ε and
Step 5. Regarding the displacement, set
The definition of the
and note that the set
is also open and bounded.
We now prove that
By using the above fact, we get (recalling (7.36))
By letting
Now we prove the convergence of the gradient. First we note that the gradients are uniformly bounded, namely it can be verified that
for some positive uniform constant
and, from similar estimates as before, together with the uniform boundedness of the gradients, we can conclude that
Step 6. It remains to prove the convergence of the energy. Set
Step 6.1. We now prove the convergence of the bulk term in (7.47). We have
By noticing that
From here we conclude by Dominated Convergence Theorem. Notice that
the second term on the right-hand side of (7) is going to zero, since
From here we conclude the convergence of the bulk term in (7.47).
Step 6.2. We now consider the surface terms in (7.47). Using the index sets defined in (7.34), we get
By using the fact that ψ is continuous (as we are in the convexity assumption stated in Step 1) and from the fact that, for every
we get
This concludes the estimate for the surface term in (7.47).
Step 7. By putting all the steps together, we then conclude that
This completes the proof of Theorem 7.1. ∎
References
[1] L. Ambrosio, N. Fusco and D. Pallara, Functions of Bounded Variation and Free Discontinuity Problems, Oxford Math. Monogr., Oxford University, New York, 2000. 10.1093/oso/9780198502456.001.0001Suche in Google Scholar
[2] M. Bonacini, Epitaxially strained elastic films: The case of anisotropic surface energies, ESAIM Control Optim. Calc. Var. 19 (2013), no. 1, 167–189. 10.1051/cocv/2012003Suche in Google Scholar
[3] M. Bonacini, Stability of equilibrium configurations for elastic films in two and three dimensions, Adv. Calc. Var. 8 (2015), no. 2, 117–153. 10.1515/acv-2013-0018Suche in Google Scholar
[4] E. Bonnetier and A. Chambolle, Computing the equilibrium configuration of epitaxially strained crystalline films, SIAM J. Appl. Math. 62 (2002), no. 4, 1093–1121. 10.1137/S0036139900368571Suche in Google Scholar
[5] G. Bouchitté, Représentation intégrale de fonctionnelles convexes sur un espace de mesures. II. Cas de l’épi-convergence, Ann. Univ. Ferrara Sez. VII (N. S.) 33 (1987), 113–156. 10.1007/BF02825026Suche in Google Scholar
[6] G. Bouchitté and G. Buttazzo, New lower semicontinuity results for nonconvex functionals defined on measures, Nonlinear Anal. 15 (1990), 679–692. 10.1016/0362-546X(90)90007-4Suche in Google Scholar
[7] A. Braides, A. Chambolle and M. Solci, A relaxation result for energies defined on pairs set-function and applications, ESAIM Control Optim. Calc. Var. 13 (2007), no. 4, 717–734. 10.1051/cocv:2007032Suche in Google Scholar
[8] G. Buttazzo and L. Freddi, Functionals defined on measures and applications to non-equi-uniformly elliptic problems, Ann. Mat. Pura Appl. (4) 159 (1991), 133–149. 10.1007/BF01766298Suche in Google Scholar
[9] M. Caroccia and R. Cristoferi, On the gamma convergence of functionals defined over pairs of measures and energy-measures, J. Nonlinear Sci. 30 (2020), no. 4, 1723–1769. 10.1007/s00332-020-09623-ySuche in Google Scholar
[10] M. Caroccia, R. Cristoferi and L. Dietrich, Equilibria configurations for epitaxial crystal growth with adatoms, Arch. Ration. Mech. Anal. 230 (2018), no. 3, 785–838. 10.1007/s00205-018-1258-9Suche in Google Scholar
[11] A. Chambolle and M. Solci, Interaction of a bulk and a surface energy with a geometrical constraint, SIAM J. Math. Anal. 39 (2007), no. 1, 77–102. 10.1137/060649173Suche in Google Scholar
[12] V. Crismale and M. Friedrich, Equilibrium configurations for epitaxially strained films and material voids in three-dimensional linear elasticity, Arch. Ration. Mech. Anal. 237 (2020), no. 2, 1041–1098. 10.1007/s00205-020-01525-3Suche in Google Scholar
[13] G. Dal Maso, Generalised functions of bounded deformation, J. Eur. Math. Soc. (JEMS) 15 (2013), no. 5, 1943–1997. 10.4171/jems/410Suche in Google Scholar
[14] H. Federer, Geometric Measure Theory, Springer, Berlin, 1969. Suche in Google Scholar
[15] I. Fonseca, N. Fusco, G. Leoni and M. Morini, Equilibrium configurations of epitaxially strained crystalline films: Existence and regularity results, Arch. Ration. Mech. Anal. 186 (2007), no. 3, 477–537. 10.1007/s00205-007-0082-4Suche in Google Scholar
[16] I. Fonseca, N. Fusco, G. Leoni and M. Morini, Motion of elastic thin films by anisotropic surface diffusion with curvature regularization, Arch. Ration. Mech. Anal. 205 (2012), no. 2, 425–466. 10.1007/s00205-012-0509-4Suche in Google Scholar
[17] I. Fonseca, N. Fusco, G. Leoni and M. Morini, A model for dislocations in epitaxially strained elastic films, J. Math. Pures Appl. (9) 111 (2018), 126–160. 10.1016/j.matpur.2017.09.001Suche in Google Scholar
[18]
I. Fonseca and G. Leoni,
Modern Methods in the Calculus of Variations:
[19] E. Fried and M. E. Gurtin, A unified treatment of evolving interfaces accounting for small deformations and atomic transport with emphasis on grain-boundaries and epitaxy, Adv. Appl. Mech. 40 (2004), 1–177. 10.1016/S0065-2156(04)40001-5Suche in Google Scholar
[20] N. Fusco and M. Morini, Equilibrium configurations of epitaxially strained elastic films: second order minimality conditions and qualitative properties of solutions, Arch. Ration. Mech. Anal. 203 (2012), no. 1, 247–327. 10.1007/s00205-011-0451-xSuche in Google Scholar
[21] E. Giusti, Minimal Surfaces and Functions of Bounded Variation, Monogr. Math. 80, Birkhäuser, Basel, 1984. 10.1007/978-1-4684-9486-0Suche in Google Scholar
[22] M. A. Grinfeld, The stress driven instability in elastic crystals: Mathematical models and physical manifestations, J. Nonlinear Sci. 3 (1993), no. 1, 35–83. 10.1007/BF02429859Suche in Google Scholar
[23] G. Leoni, A First Course in Fractional Sobolev Spaces, Grad. Stud. Math. 229, American Mathematical Society, Providence, 2023. 10.1090/gsm/229Suche in Google Scholar
[24] B. Spencer and J. Tersoff, Equilibrium shapes and properties of epitaxially strained islands, Phys. Rev. Lett. 79 (1997), 4858–4861. 10.1103/PhysRevLett.79.4858Suche in Google Scholar
© 2025 Walter de Gruyter GmbH, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Frontmatter
- Boundary behavior of solutions to fractional p-Laplacian equation
- Existence of distributional solutions to some quasilinear degenerate elliptic systems with low integrability of the datum
- A weakly coupled system of p-Laplace type in a heat conduction problem
- On the interior regularity criteria for the viscoelastic fluid system with damping
- On the L 1-relaxed area of graphs of BV piecewise constant maps taking three values
- On prescribing the number of singular points in a Cosserat-elastic solid
- Stability from rigidity via umbilicity
- Free boundary regularity in the fully nonlinear parabolic thin obstacle problem
- Calderón–Zygmund theory for strongly coupled linear system of nonlocal equations with Hölder-regular coefficient
- Inertial (self-)collisions of viscoelastic solids with Lipschitz boundaries
- A discrete crystal model in three dimensions: The line-tension limit for dislocations
- Two-dimensional graph model for epitaxial crystal growth with adatoms
- Global existence for the Willmore flow with boundary via Simon’s Li–Yau inequality
- Linearization in magnetoelasticity
- The fractional Hopf differential and a weak formulation of stationarity for the half Dirichlet energy
Artikel in diesem Heft
- Frontmatter
- Boundary behavior of solutions to fractional p-Laplacian equation
- Existence of distributional solutions to some quasilinear degenerate elliptic systems with low integrability of the datum
- A weakly coupled system of p-Laplace type in a heat conduction problem
- On the interior regularity criteria for the viscoelastic fluid system with damping
- On the L 1-relaxed area of graphs of BV piecewise constant maps taking three values
- On prescribing the number of singular points in a Cosserat-elastic solid
- Stability from rigidity via umbilicity
- Free boundary regularity in the fully nonlinear parabolic thin obstacle problem
- Calderón–Zygmund theory for strongly coupled linear system of nonlocal equations with Hölder-regular coefficient
- Inertial (self-)collisions of viscoelastic solids with Lipschitz boundaries
- A discrete crystal model in three dimensions: The line-tension limit for dislocations
- Two-dimensional graph model for epitaxial crystal growth with adatoms
- Global existence for the Willmore flow with boundary via Simon’s Li–Yau inequality
- Linearization in magnetoelasticity
- The fractional Hopf differential and a weak formulation of stationarity for the half Dirichlet energy